基于单目相机的物体检测方法、装置、设备及存储介质与流程
本申请涉及图像处理,尤其涉及一种基于单目相机的物体检测方法、装置、电子设备及计算机可读存储介质。
背景技术:
1、随着科技的进步,在人们生活中汽车及导航的应用也越来越普及,而基于视觉测量技术的障碍物检测也在汽车辅助驾驶、机器人导航等领域有重要应用。
2、目前常用的视觉测量技术包括单目视觉测量、双目视觉测量和结构光视觉测量。双目视觉测量结构较为复杂、且测量时间较长,结构光视觉测量的测量系统标定比较困难,为汽车辅助驾驶、机器人导航等智能应用领域增加昂贵的成本,且侦测到环境中部分深度信息与避障没有关系,例如高于机器人高度的深度信息。
技术实现思路
1、有鉴于此,本申请提出了一种基于单目相机的物体检测方法、装置、电子设备及计算机可读存储介质,通过单目相机获取包含目标物体的目标图像,并确定目标物体在目标图像中像素坐标,然后根据目标物体在目标图像中的像素坐标及预设坐标转换关系或预设深度预测模型,确定所述目标物体在所述目标图像中的空间位置信息,能够有效解决视觉测距成本高、结构复杂、实时性差及精确度低的问题,且高效准确地检测出目标物体。
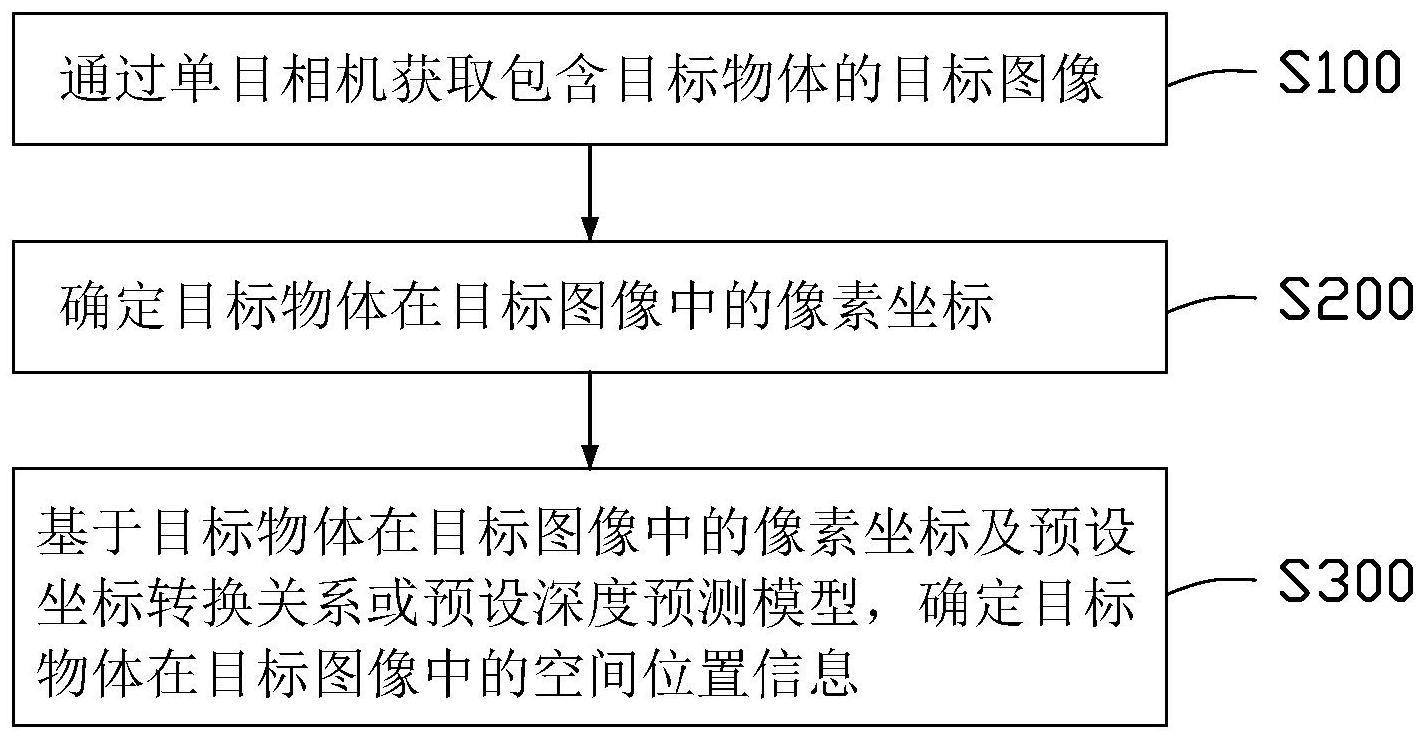
2、第一方面,本申请一实施例提供一种基于单目相机的物体检测方法,包括:
3、通过单目相机获取包含目标物体的目标图像;
4、确定所述目标物体在所述目标图像中的像素坐标;
5、基于所述目标物体在所述目标图像中的像素坐标及预设坐标转换关系或预设深度预测模型,确定所述目标物体在所述目标图像中的空间位置信息。
6、于一实施例中,所述预设坐标转换关系的获取方法,包括:根据小孔成像原理,以所述单目相机为圆心,通过所述单目相机的内参将所述目标物体基于所述目标图像的像素坐标转换为基于世界坐标系的实际坐标,以建立所述预设坐标转换关系。
7、于一实施例中,所述基于所述目标物体在所述目标图像中的像素坐标及预设坐标转换关系,确定所述目标物体在所述目标图像中的空间位置信息,包括:通过所述预设坐标转换关系将所述目标物体在所述目标图像中的像素坐标转换为基于世界坐标系的实际坐标,根据所述基于世界坐标系的实际坐标获取所述目标物体在所述目标图像中的空间位置信息。
8、于一实施例中,所述预设深度预测模型的获取方法,包括:在地面的不同位置标记已知深度标记点,根据标记过程中所述已知深度标记点的深度信息和所述单目相机拍摄的目标图像中对应所述已知深度标记点的像素坐标,得到所述已知深度标记点的三维坐标,以得到训练数据集,通过对所述训练数据集进行特征工程处理,并通过预设建模算法,产生所述预设深度预测模型。
9、于一实施例中,所述基于所述目标物体在所述目标图像中的像素坐标及预设深度预测模型,确定所述目标物体在所述目标图像中的空间位置信息,包括:将所述目标物体的像素坐标输入所述预设深度预测模型,得到所述目标物体的深度值,以确定所述目标物体在所述目标图像中的空间位置信息。
10、于一实施例中,所述在地面的不同位置标示已知深度标记的方法,包括:棋盘格或激光投影。
11、于一实施例中,所述单目相机的安装高度与安装角度为固定的。
12、第二方面,本申请一实施例提供一种基于单目相机的物体检测装置,包括:获取模块,用于通过单目相机获取包含目标物体的目标图像;转换模块,用于将所述目标图像转换为目标图像,并确定所述目标物体在所述目标图像中的像素坐标;定位模块,用于基于所述目标物体在所述目标图像中的像素坐标及预设坐标转换关系或预设深度预测模型,确定所述目标物体在所述目标图像中的空间位置信息。
13、第三方面,本申请一实施例提供一种电子设备,所述电子设备包括处理器和存储器,所述存储器用于存储指令,所述处理器用于调用所述存储器中的指令,使得所述电子设备执行如第一方面所述的基于单目相机的物体检测方法。
14、第四方面,本申请一实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,当所述计算机指令在电子设备上运行时,使得所述电子设备执行如第一方面所述的基于单目相机的物体检测方法。
15、本申请实施方式提供的基于单目相机的物体检测方法、装置、电子设备及计算机可读存储介质,通过单目相机获取包含目标物体的目标图像,并确定目标物体在目标图像中像素坐标,然后根据目标物体在目标图像中的像素坐标及预设坐标转换关系或预设深度预测模型,确定所述目标物体在所述目标图像中的空间位置信息,能够有效解决视觉测距成本高、结构复杂、实时性差及精确度低的问题,且高效准确地检测出目标物体。
技术特征:
1.一种基于单目相机的物体检测方法,其特征在于,包括:
2.如权利要求1所述的基于单目相机的物体检测方法,其特征在于,所述预设坐标转换关系的获取方法,包括:根据小孔成像原理,以所述单目相机为圆心,通过所述单目相机的内参将所述目标物体基于所述目标图像的像素坐标转换为基于世界坐标系的实际坐标,以建立所述预设坐标转换关系。
3.如权利要求2所述的基于单目相机的物体检测方法,其特征在于,所述基于所述目标物体在所述目标图像中的像素坐标及预设坐标转换关系,确定所述目标物体在所述目标图像中的空间位置信息,包括:通过所述预设坐标转换关系将所述目标物体在所述目标图像中的像素坐标转换为基于世界坐标系的实际坐标,根据所述基于世界坐标系的实际坐标获取所述目标物体在所述目标图像中的空间位置信息。
4.如权利要求1所述的基于单目相机的物体检测方法,其特征在于,所述预设深度预测模型的获取方法,包括:在地面的不同位置标记已知深度标记点,根据标记过程中所述已知深度标记点的深度信息和所述单目相机拍摄的目标图像中对应所述已知深度标记点的像素坐标,得到所述已知深度标记点的三维坐标,以得到训练数据集,通过对所述训练数据集进行特征工程处理,并通过预设建模算法,产生所述预设深度预测模型。
5.如权利要求4所述的基于单目相机的物体检测方法,其特征在于,所述基于所述目标物体在所述目标图像中的像素坐标及预设深度预测模型,确定所述目标物体在所述目标图像中的空间位置信息,包括:将所述目标物体的像素坐标输入所述预设深度预测模型,得到所述目标物体的深度值,以确定所述目标物体在所述目标图像中的空间位置信息。
6.如权利要求4所述的基于单目相机的物体检测方法,其特征在于,所述在地面的不同位置标示已知深度标记的方法,包括:棋盘格或激光投影。
7.如权利要求1所述的基于单目相机的物体检测方法,其特征在于,所述单目相机的安装高度与安装角度为固定的。
8.一种基于单目相机的物体检测装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括处理器和存储器,所述存储器用于存储指令,所述处理器用于调用所述存储器中的指令,使得所述电子设备执行权利要求1至权利要求7中任一项所述的基于单目相机的物体检测方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储计算机指令,当所述计算机指令在电子设备上运行时,使得所述电子设备执行如权利要求1至权利要求7中任一项所述的基于单目相机的物体检测方法。
技术总结
本申请提出一种基于单目相机的物体检测方法、装置、电子设备及计算机可读存储介质,该方法包括:通过单目相机获取包含目标物体的目标图像;确定所述目标物体在所述目标图像中的像素坐标;基于所述目标物体在所述目标图像中的像素坐标及预设坐标转换关系或预设深度预测模型,确定所述目标物体在所述目标图像中的空间位置信息。本申请通过单目相机获取包含目标物体的目标图像,并确定目标物体在目标图像中像素坐标,然后根据目标物体在目标图像中的像素坐标及预设坐标转换关系或预设深度预测模型,确定所述目标物体在所述目标图像中的空间位置信息,能够高效准确地检测出目标物体。
技术研发人员:蔡锦雄,邱德任,叶佳伦,唐学用,廖英郎
受保护的技术使用者:鸿富锦精密电子(烟台)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!