特征点的提取和匹配方法、装置、地图制作系统及介质与流程
本申请涉及数据处理,特别涉及一种特征点的提取和匹配方法、装置、地图制作系统、介质及设备。
背景技术:
1、车辆的定位,是自动驾驶车辆与3d地图对应程度的重要体现,在自动驾驶车辆在行驶过程中,准确的定位信息能够使得自动驾驶车辆对环境的感知更加准确。在地库中进行定位的过程中,首先需要进行特征的提取与匹配,利用对特征点的提取与匹配获得的定位信息精度高,因此,特征点的提取与匹配在定位过程往往更受欢迎。
2、在传统的特征点提取过程中,往往采取基于纯图像或基于纯点云的提取和匹配方式,获取特征点,利用特征点实现对自动驾驶车辆的定位。
3、然而,无论是采取基于纯图像或基于纯点云的提取和匹配方式,其在匹配过程中多采用最近邻匹配的方式获取匹配结果,但是该方式往往会出现匹配错误的情况;例如,对于车辆在路上行驶一段之后又回到原地,此时对于车辆行驶过程中的出发点与终止点,本应该能够匹配成功,但是由于终止点为行驶一段之后的特征点,该特征点具有累计数据,因此在进行最近邻匹配时,不会将出发点与终止点作为互相的最近邻点,以致于出发点与终止点匹配失败,造成匹配错误的情况,进而造成车辆定位错误,使用户体验效果降低。
技术实现思路
1、针对现有技术存在的由于累计信息的影响,造成匹配错误的情况,进而造成车辆定位错误,使用户体验效果降低的问题,本申请主要提供一种特征点的提取和匹配方法、装置、地图制作系统、介质及设备。
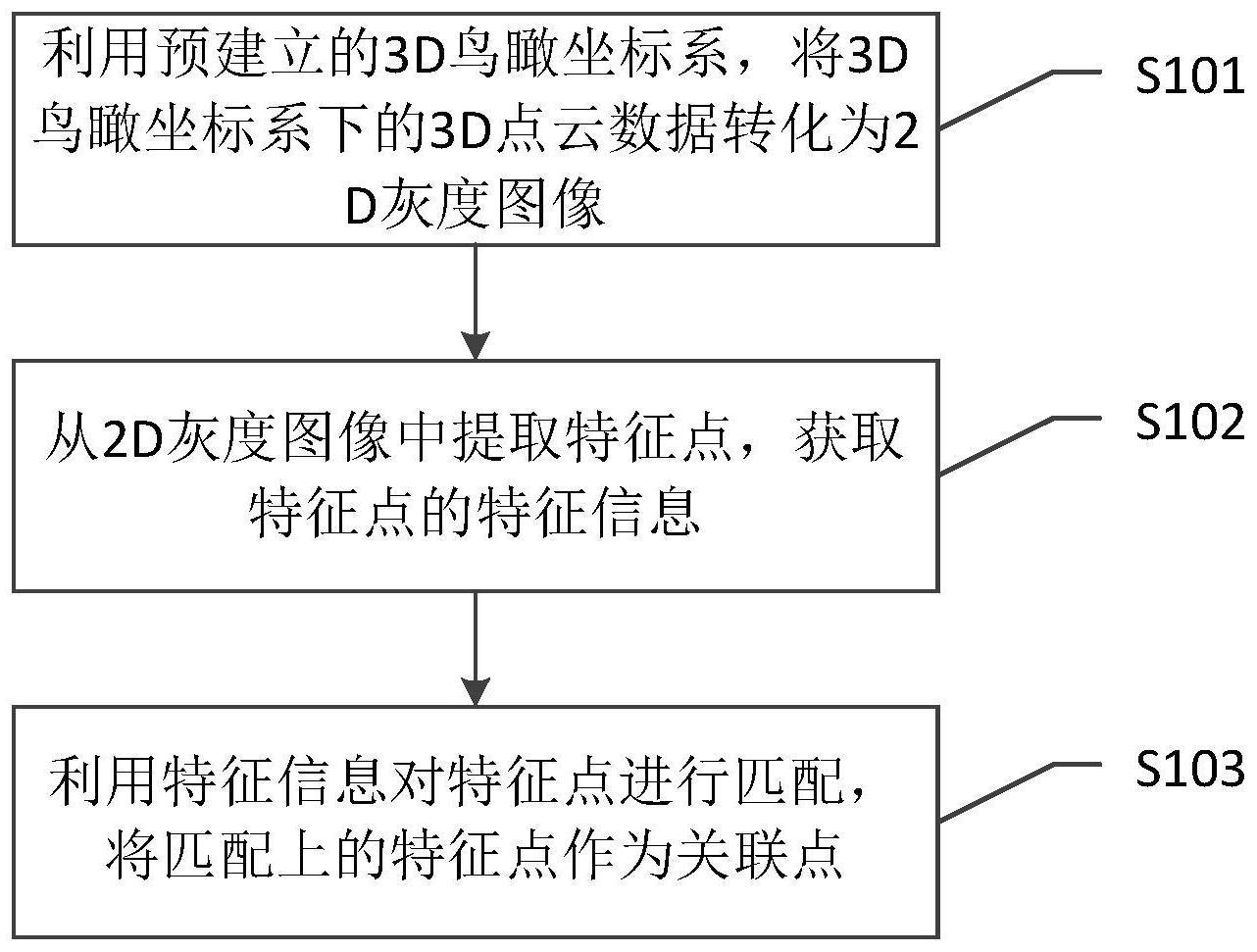
2、第一方面,本申请实施例提供一种特征点的提取和匹配方法,其包括:利用预建立的3d鸟瞰坐标系,将3d鸟瞰坐标系下的3d点云数据转化为2d灰度图像;从2d灰度图像中提取特征点,获取特征点的特征信息;从鸟瞰深度图像中提取特征点,获取特征点的特征信息;利用特征信息对特征点进行匹配,将匹配上的特征点作为关联点。
3、第二方面,本申请实施例提供一种特征点的提取和匹配装置,其包括:图像获取模块,利用预建立的3d鸟瞰坐标系,将3d鸟瞰坐标系下的3d点云数据转化为2d灰度图像;特征提取模块,从2d灰度图像中提取特征点,获取特征点的特征信息;特征匹配模块,利用特征信息对特征点进行匹配,将匹配上的特征点作为关联点。
4、第三方面,本申请实施例提供一种地图制作系统,其包括特征点的提取和匹配装置,其中特征点的提取和匹配装置包括:图像获取模块,利用预建立的3d鸟瞰坐标系,将3d鸟瞰坐标系下的3d点云数据转化为2d灰度图像;特征提取模块,从2d灰度图像中提取特征点,获取特征点的特征信息;特征匹配模块,利用特征信息对特征点进行匹配,将匹配上的特征点作为关联点。
5、第四方面,本申请实施例提供一种计算机可读存储介质,其存储有计算机指令,该计算机指令被操作以执行方案一中的特征点的提取和匹配方法。
6、第五方面,本申请实施例提供一种计算机设备,其包括:至少一个处理器;以及与至少一个处理器进行通信连接的存储器;其中,存储器存储有可被至少一个处理器执行的计算机指令,至少一个处理器操作计算机指令以执行方案一中的特征点的提取和匹配方法。
7、本申请实施例的技术方案通过提供一种3d点云与图像结合的方式,提取车辆行驶过程中的特征点,和历史帧特征点进行匹配,选取出匹配得分超过阈值的匹配对,实现对车辆的特征点进行精准匹配,进而实现对车辆的精准定位,使得用户在驾驶过程的体验效果提高。
技术特征:
1.一种特征点的提取和匹配方法,其特征在于,包括:
2.根据权利要求1所述的特征点的提取和匹配方法,其特征在于,所述将3d鸟瞰坐标系下的3d点云数据转化为2d灰度图像,进一步包括:
3.根据权利要求2所述的特征点的提取和匹配方法,其特征在于,所述在所述3d鸟瞰坐标系建立预设范围的3d网格,进一步包括:
4.根据权利要求2所述的特征点的提取和匹配方法,其特征在于,所述在所述3d鸟瞰坐标系建立预设范围的3d网格,还包括:
5.根据权利要求2所述的特征点的提取和匹配方法,其特征在于,所述在所述3d鸟瞰坐标系建立预设范围的3d网格,还包括:
6.根据权利要求2所述的特征点的提取和匹配方法,其特征在于,所述将所述3d网格中的3d点云数据转化为灰度值,获取2d灰度图像,进一步包括:
7.根据权利要求1所述的特征点的提取和匹配方法,其特征在于,所述从所述2d灰度图像中提取特征点,获取所述特征点的特征信息,进一步包括:
8.根据权利要求1所述的特征点的提取和匹配方法,其特征在于,所述利用所述特征信息对所述特征点进行匹配,进一步包括:
9.根据权利要求1所述的特征点的提取和匹配方法,其特征在于,所述将匹配上的所述特征点作为关联点之后,还包括:
10.一种特征点的提取和匹配装置,其特征在于,包括:
11.一种地图制作系统,其特征在于,所述地图制作系统包括如权利要求7所述的特征点的提取和匹配装置。
12.一种计算机可读存储介质,其存储有计算机指令,其特征在于,所述计算机指令被操作以执行权利要求1-9中任一项所述的特征点的提取和匹配方法。
13.一种计算机设备,其特征在于,包括:
技术总结
本申请公开了一种特征点的提取和匹配方法、装置、地图制作系统及介质,属于数据处理技术领域。该方法主要包括:利用预建立的3D鸟瞰坐标系,将3D鸟瞰坐标系下的3D点云数据转化为2D灰度图像;从2D灰度图像中提取特征点,获取特征点的特征信息;利用特征信息对特征点进行匹配,将匹配上的特征点作为关联点。通过提供一种3D点云与图像结合的方式,提取车辆行驶过程中的特征点,和历史帧特征点进行匹配,选取出匹配得分超过阈值的匹配对,实现对车辆的特征点进行精准匹配,进而实现对车辆的精准定位,使得用户在驾驶过程的体验效果提高。
技术研发人员:朱敏峰,高诚壑,刘哲铭
受保护的技术使用者:北京初速度科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!