手术用探针标定方法、装置、计算机设备和存储介质与流程
本申请涉及医学设备领域,特别是涉及一种手术用探针标定方法、装置、计算机设备和存储介质。
背景技术:
1、探针在医疗导航设备中常被用来获取物体表面的位置信息,其标定的准确性将直接影响获取位置的准确性,进而影响注册配准的结果,严重的可能导致手术的失败,因此获取准确的探针标定结果就显的十分重要。
2、探针标定的目的是获取探针针尖相对于探针坐标系的位置。现有常用的标定方法是保持探针的针尖不动,绕着针尖旋转的过程中获取探针的位姿,进而计算出探针的标定参数,但这种方法严重依赖操作者的熟练度,很难保证针尖不动,且探针的针尖并不是绝对的尖端,有一定的弧面,绕针尖转动的时候实际上是绕着弧心旋转,因而该种方法标定结果不准确。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种标定结果更准确的手术用探针标定方法、装置、计算机设备和存储介质。
2、第一方面,本发明实施例提出一种手术用探针标定方法,所述方法包括:
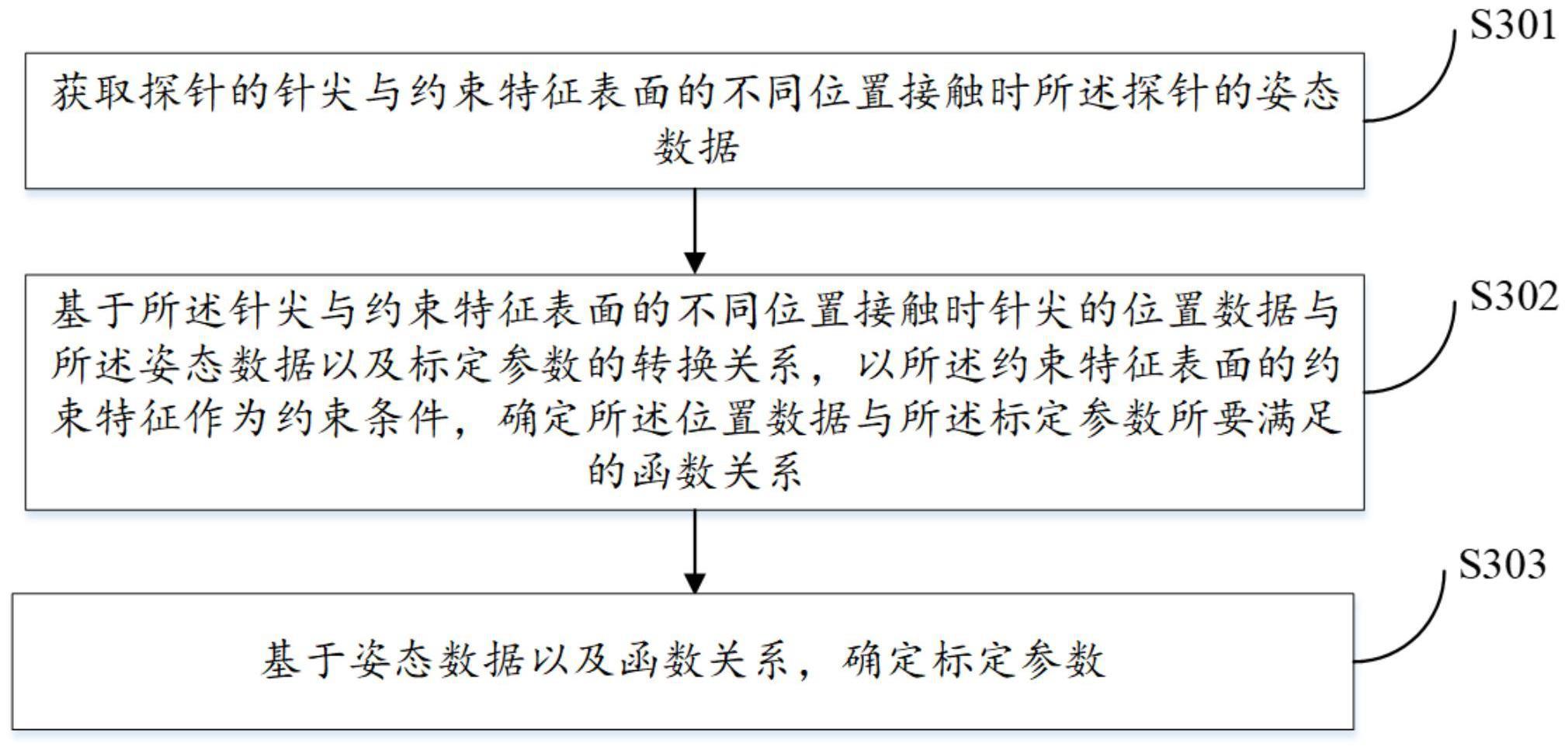
3、获取探针的针尖与约束特征表面的不同位置接触时所述探针的姿态数据;
4、基于所述针尖与约束特征表面的不同位置接触时针尖的位置数据与所述姿态数据以及标定参数的转换关系,以所述约束特征表面的约束特征作为约束条件,确定所述位置数据与所述标定参数所要满足的函数关系;
5、基于所述姿态数据以及所述函数关系,确定所述标定参数。
6、在一实施例中,所述姿态数据、所述针尖与约束特征表面的不同位置接触时针尖的位置数据以及所述标定参数满足以下转换关系:
7、[xi,yi,zi]t=ri[m,n,k]t+pi;
8、其中,ri表示第i组位姿数据的旋转矩阵,pi表示第i组位姿数据的平移向量,[m,n,k]t表示所述探针的标定参数;[xi,yi,zi]表示第i组位姿数据所对应的针尖的位置数据。
9、在一实施例中,所述确定所述位置数据以及标定参数所要满足的函数关系包括:
10、设定约束条件为:
11、f(a1,…,ak,x,y,z)=0;
12、其中,(a1,…,ak)表示所述约束特征的特征参数,k表示所述特征参数的数量,(x,y,z)表示所述针尖的位置数据;
13、再基于所述转换关系,确定所述位置数据以及标定参数所要满足的函数关系为:
14、f(m,n,k,a1,…,ak,r,p)=0。
15、在一实施例中,所述基于所述姿态数据以及函数关系,确定所述标定参数包括:
16、基于所述函数关系,确定约束函数:
17、f(m,n,k,a1,…,ak,ri,pi)=0;
18、其中,参数t=[m,n,k,a1,…,ak],求所述约束关系关于参数(m,n,k,a1,…,ak)雅克比矩阵;
19、基于所述雅克比矩阵,构建误差矩阵;
20、利用所述姿态数据,对所述误差矩阵求解得到参数titer,并对所述参数titer迭代运算直到残差满足要求,得到参数t;
21、基于所述参数t,得到所述标定参数。
22、在一实施例中,所述基于所述雅克比矩阵,构建误差矩阵包括:
23、所述雅克比矩阵如下:
24、
25、约束函数fi(t)按照傅里叶公式展开并舍去高阶项,得:
26、jiδt=δfi;
27、构造误差方程:
28、
29、其中,n表示所述姿态数据的数量。
30、在一实施例中,所述方法还包括:
31、基于所述转换关系及所述标定参数,确定所述针尖相对于探针坐标系的位置。
32、第二方面,本发明实施例提出一种手术用探针标定装置,所述装置包括:
33、获取模块,用于获取探针的针尖与约束特征表面的不同位置接触时所述探针的姿态数据;
34、第一确定模块,用于基于所述针尖与约束特征表面的不同位置接触时针尖的位置数据与所述姿态数据以及标定参数的转换关系,以所述约束特征表面的约束特征作为约束条件,确定所述位置数据与所述标定参数所要满足的函数关系;
35、第二确定模块,用于基于所述姿态数据以及所述函数关系,确定所述标定参数。
36、在一实施例中,所述装置还包括:
37、第三确定模块,用于基于所述转换关系及所述标定参数,确定所述针尖相对于探针坐标系的位置。
38、第三方面,本发明实施例提出一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行第一方面所述的步骤。
39、第四方面,本发明实施例提出一种计算机可读存储介质,其上存储有计算机程序,所述处理器执行所述计算机程序时实现第一方面所述的步骤。
40、相比于现有技术,上述方法、装置、计算机设备和存储介质,通过获取探针的针尖与约束特征表面的不同位置接触时所述探针的姿态数据,基于所述针尖与约束特征表面的不同位置接触时针尖的位置数据与所述姿态数据以及标定参数的转换关系,以所述约束特征表面的约束特征作为约束条件,确定所述位置数据与所述标定参数所要满足的函数关系,再基于所述姿态数据以及所述函数关系,确定所述标定参数。本发明不依赖操作者的熟练度,操作更加简单,其次标定精度更高。
技术特征:
1.一种手术用探针标定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述姿态数据、所述针尖与约束特征表面的不同位置接触时针尖的位置数据以及所述标定参数满足以下转换关系:
3.根据权利要求2所述的方法,其特征在于,所述确定所述位置数据以及标定参数所要满足的函数关系包括:
4.根据权利要求3所述的方法,其特征在于,所述基于所述姿态数据以及函数关系,确定所述标定参数包括:
5.根据权利要求4所述的方法,其特征在于,所述基于所述雅克比矩阵,构建误差矩阵包括:
6.根据权利要求1所述的方法,其特征在于,所述方法还包括:
7.一种手术用探针标定装置,其特征在于,所述装置包括:
8.根据权利要求7所述的装置,其特征在于,所述装置还包括:
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时,实现权利要求1至6中任一项所述的方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现权利要求1至6中任一项所述的方法的步骤。
技术总结
本申请涉及医学设备领域,特别是涉及一种手术用探针标定方法、装置、计算机设备和存储介质,包括:获取探针的针尖与约束特征表面的不同位置接触时所述探针的姿态数据;基于所述针尖与约束特征表面的不同位置接触时针尖的位置数据与所述姿态数据以及标定参数的转换关系,以所述约束特征表面的约束特征作为约束条件,确定所述位置数据与所述标定参数所要满足的函数关系;基于所述姿态数据以及所述函数关系,确定所述标定参数。本发明不依赖操作者的熟练度,操作更加简单,其次标定精度更高。
技术研发人员:刘双龙,杨坤
受保护的技术使用者:武汉联影智融医疗科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!