一种基于三阈值边缘检测算法优化机器人动态目标方法
一种基于三阈值边缘检测算法优化机器人动态目标方法
1.技术领域
2.本发明涉及一种优化机器人动态目标方法,特别是涉及一种基于三阈值边缘检测算法优化机器人动态目标方法。
背景技术:
3.随着机器人行业的快速发展,自主机器人的运用已经越来越多,其中当工作环境出现动态障碍物时,机器人进行及时避障前要先进行动态目标检测。图像的边缘是一个图像中的基本特征与重要信息,同时图像的边缘检测可以有效地减少数据量,剔除大量不相关信息,为后续研究提供便利。
技术实现要素:
4.本发明的目的在于提供一种基于三阈值边缘检测算法优化机器人动态目标方法,本发明采用了改进的canny边缘检测算法,对canny算子进行改进去优化传统帧间差分法得到的前景对象。在传统的canny边缘检测算法基础上,将双阈值检测变为三阈值检测,更改判定策略,将图像上真正边缘与虚假边缘及噪声的判定进行优化。通过性能分析,该方案部分优化了动态目标检测的效果,提高了现有边缘检测算法的准确率,使图像边缘更加连续。
5.本发明的目的是通过以下技术方案实现的:一种基于三阈值边缘检测算法优化机器人动态目标方法,所述方法包括以下步骤:首先通过大津阈值分割法得到前景与背景的分割阈值t,并将其引入到canny算子中,定义高阈值为th,低阈值为t
l
,其中th=0.6t,t
l
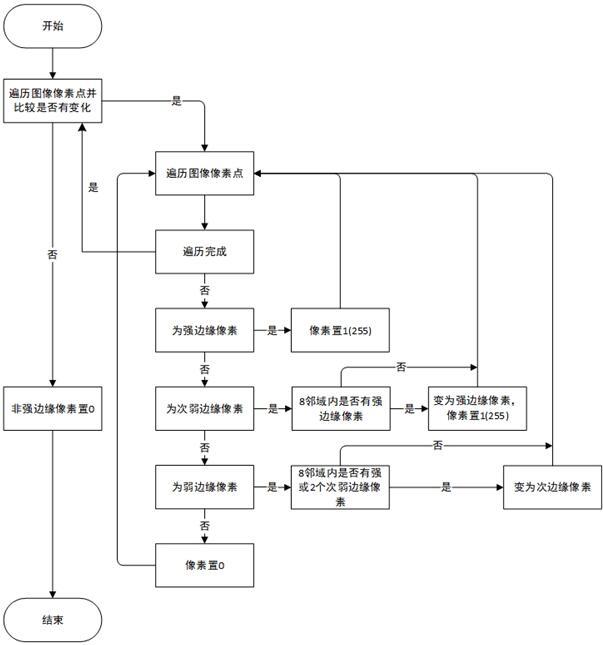
=1/3th=0.2t;在此基础上引入了中阈值tm,使其tm=0.3t;迭代遍历整个矩阵,将判定为次弱边缘像素和弱边缘像素的点使用8连通区域具体划分;当次弱边缘像素的8邻域内有强边缘像素,则将次弱边缘像素变为强边缘像素,赋值1(255);当弱边缘像素的8邻域内有一个及以上的强边缘像素或两个及以上的次弱边缘像素,则将弱边缘像素变为次弱边缘像素;最后将所有非强边缘像素置0。
6.所述的一种基于三阈值边缘检测算法优化机器人动态目标方法,所述三个阈值,一个是高阈值th,一个中阈值tm,一个低阈值t
l
。
7.所述的一种基于三阈值边缘检测算法优化机器人动态目标方法,所述给定的三阈值:1)边缘像素梯度值大于高阈值,则判定其为强边缘像素,该位置像素值置1(255);2)如果边缘梯度值小于高阈值,大于中阈值,则判定其为次弱边缘像素;3)如果如果边缘梯度值小于中阈值,大于低阈值,则判定其为弱边缘像素;4)如果边缘像素梯度值小于低阈值,则会被抑制,该位置像素置0。
8.本发明的优点与效果是:本发明考虑了边缘检测的特点大幅度地减少了数据量,并且剔除了可以认为不相关的信息,保留了图像重要的结构属性。三阈值检测在算法的时间复杂度没有明显提高的前提下,提高了实际边缘与虚假边缘的判定效果,使检测结果更加准确完整。
附图说明
9.图1为本发明梯度级分类示意图;图2为本发明三阈值筛选边缘流程图。
具体实施方式
10.下面结合附图所示实施例对本发明进行详细说明。
11.在各个边缘检测算法中,比较好的就是canny边缘检测算法。在非极大值抑制之后,会得到一个由梯度局部极小值构成的图像,图像显示就是许多离散的点,其基本表示图像中的实际像素。但是,仍然存在一些由于噪声或者颜色变化引起的一些边缘像素,为了解决上述问题,利用弱梯度值来过滤这些非实际像素的边缘像素,保留高梯度值的边缘像素。
12.本发明就是在canny边缘检测算法的双阈值检测步骤,加入中间阈值,首先通过大津阈值分割法得到前景与背景的分割阈值t,并将其引入到canny算子中,定义高阈值为th,低阈值为t
l
,其中th=0.6t,t
l
=1/3th=0.2t。
13.在此基础上引入了中阈值tm,使其tm=0.3t。梯度分布图如图1所示。
14.对于给定的三个阈值,一个是高阈值th,一个中阈值tm,一个低阈值t
l
。1.如果边缘像素梯度值大于高阈值,则判定其为强边缘像素,该位置像素值置1(255)。2.如果边缘梯度值小于高阈值,大于中阈值,则判定其为次弱边缘像素。3.如果如果边缘梯度值小于中阈值,大于低阈值,则判定其为弱边缘像素。4.如果边缘像素梯度值小于低阈值,则会被抑制,该位置像素置0。
15.三阈值检测步骤,包括迭代遍历整个矩阵,将判定为次弱边缘像素和弱边缘像素的点使用8连通区域具体划分。当次弱边缘像素的8邻域内有强边缘像素,则将次弱边缘像素变为强边缘像素,赋值1(255)。当弱边缘像素的8邻域内有一个及以上的强边缘像素或两个及以上的次弱边缘像素,则将弱边缘像素变为次弱边缘像素。最后将所有非强边缘像素置0。
技术特征:
1.一种基于三阈值边缘检测算法优化机器人动态目标方法,其特征在于,所述方法包括以下步骤:首先通过大津阈值分割法得到前景与背景的分割阈值t,并将其引入到canny算子中,定义高阈值为t
h
,低阈值为t
l
,其中t
h
=0.6t,t
l
=1/3t
h
=0.2t;在此基础上引入了中阈值t
m
,使其t
m
=0.3t;迭代遍历整个矩阵,将判定为次弱边缘像素和弱边缘像素的点使用8连通区域具体划分;当次弱边缘像素的8邻域内有强边缘像素,则将次弱边缘像素变为强边缘像素,赋值1(255);当弱边缘像素的8邻域内有一个及以上的强边缘像素或两个及以上的次弱边缘像素,则将弱边缘像素变为次弱边缘像素;最后将所有非强边缘像素置0。2.根据权利要求1所述的一种基于三阈值边缘检测算法优化机器人动态目标方法,其特征在于,所述三个阈值,一个是高阈值t
h
,一个中阈值t
m
,一个低阈值t
l
。3.根据权利要求1所述的一种基于三阈值边缘检测算法优化机器人动态目标方法,其特征在于,所述给定的三阈值:1)边缘像素梯度值大于高阈值,则判定其为强边缘像素,该位置像素值置1(255);2)如果边缘梯度值小于高阈值,大于中阈值,则判定其为次弱边缘像素;3)如果如果边缘梯度值小于中阈值,大于低阈值,则判定其为弱边缘像素;4)如果边缘像素梯度值小于低阈值,则会被抑制,该位置像素置0。
技术总结
一种基于三阈值边缘检测算法优化机器人动态目标方法,涉及一种优化机器人动态目标方法,包括以下步骤:首先通过大津阈值分割法得到前景与背景的分割阈值T,并将其引入到Canny算子中,定义高阈值为T
技术研发人员:王军 林宇航
受保护的技术使用者:沈阳化工大学
技术研发日:2022.06.07
技术公布日:2022/9/27
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1