自动分类过渡动作的方法与流程
本发明关于过渡动作,特别是一种自动分类过渡动作的方法。
背景技术:
1、模拟虚拟角色(simulated virtual character)已广泛应用于机器人、电影和游戏等多种产业。虽然每一个产业的模拟角色所需性质有所不同,但对所有产业来说,重点在于角色执行许多动作的能力。
2、一个多功能的(versatile)角色可以从一个动作过渡到另一个动作,例如从慢跑到跳跃。另外,此角色还要能执行多种不同风格(style)的过渡动作。例如,在越过障碍物时,角色可能需要跳过指定的障碍物才能达成目标。这一个具有障碍的范例已经引入了许多问题变化,因为在某些情况下角色需要跳过高栏架或是宽间隙。在此范例中,一个执行跳跃的通用解决方案是不够的,因为这两种跳跃方式(高栏架及宽间隙)需要以不同的方式解决。
3、然而,为虚拟角色生成过渡动作并不容易。传统方法是手动产生关键影格(keyframe)并使用动作内插(motion interpolation)技术。在媒体制作中,关键影格是时间在线的一个位置,其标示过渡的开始或过渡的结束。它包含定义过渡应该在哪里开始或停止的特殊信息。中间影格随着时间在这些定义之间进行插值,以创建运动的错觉。但是,为了生成不同风格的过渡运动,需要生成不同的关键影格集合,导致人力成本及时间成本缺乏效率地增加。
技术实现思路
1、有鉴于此,本发明提出了一种控制机制,可以在虚拟角色的过渡运动中无缝且稳健地整合用户偏好。这种可靠的控制使虚拟角色能够有效地应对多种障碍。
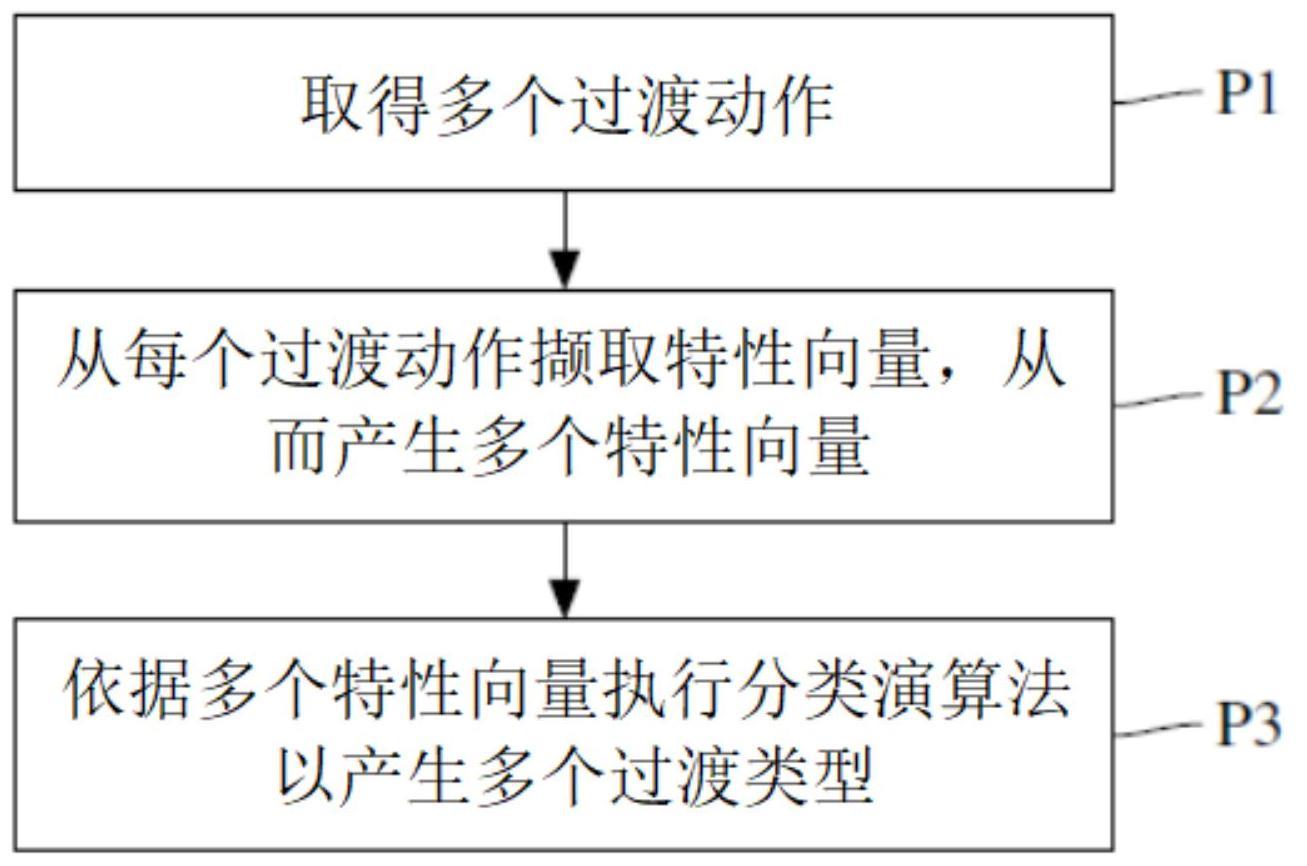
2、依据本发明一实施例的一种自动分类过渡动作的方法,包括以运算装置执行下列步骤:取得多个过渡动作,每个过渡动作关联于源动作、目标动作及从源动作转换至目标动作的转换机制;从每个过渡动作撷取特性向量,从而产生多个特性向量,其中每个特性向量的包括多个过渡特性;以及依据这些特性向量执行分类算法以产生多个过渡类型。
3、较佳的是,所述多个过渡特性包括质心高度以及前进加速度。
4、较佳的是,其中所述分类算法为k-平均算法,且所述k值是以手肘方法产生。
5、较佳的是,其中所述分类算法为阶层式分群法。
6、较佳的是,其中所述多个过渡动作的每一个包括多个关键信息框。
7、较佳的是,其中取得所述多个过渡动作包括:以一复杂运动控制器产生所述多个过渡动作,所述转换机制为所述过渡张量,且所述自动分类过渡动作的方法更包括:在取得所述多个过渡动作之前,执行:取得一源控制器及一目标控制器,所述源控制器用于产生一源运动,所述目标控制器用于产生一目标运动;决定所述源控制器及所述目标控制器之间的一过渡张量,所述过渡张量具有多个索引,所述多个索引中的一个代表所述源运动的多个相位;计算所述过渡张量的多个结果,并依据所述多个索引记录所述多个结果,其中所述多个结果的每一个包括一存活指标、一过渡时间、一耗能成本及一控制精确度;依据所述多个结果计算多个过渡质量;以及在所述多个过渡质量中寻找一最佳过渡质量以建立所述复杂运动控制器,所述复杂运动控制器用以产生对应于所述多个相位中的一个的一复杂运动。
8、较佳的是,其中每一所述多个过渡质量包括一稳定值,所述稳定值是所述处理器基于多个邻近相位及所述多个相位中的其中之一,依据所述存活指标的一存活机率、所述结果值的一局部邻域、关联于所述局部邻域的一过渡结果计算得到,其中所述局部邻域包括多个参考相位,所述多个参考相位对应于所述结果值对应的所述过渡张量对应的所述源运动的所述多个相位中的一个。
9、较佳的是,其中依据所述多个结果计算多个过渡质量包括:计算每一所述多个结果的一结果值及一稳定度;以及依据所述结果值及所述稳定度计算所述多个过渡品值中的一个;其中所述结果值是所述处理器基于多个邻近相位及所述多个相位中的其中之一,依据所述存活指标、所述过渡时间、所述耗能成本及所述控制精确度计算得到;以及所述稳定值是所述处理器基于多个邻近相位及所述多个相位中的其中之一,依据所述存活指标的一存活机率、所述结果值的一局部邻域、关联于所述局部邻域的一过渡结果计算得到,其中所述局部邻域包括多个参考相位,所述多个参考相位对应于所述结果值对应的所述过渡张量对应的所述源运动的所述多个相位中的一个。
10、较佳的是,其中所述源控制器或所述目标控制器依据一当前状态及一控制目标产生所述源运动及所述目标运动,所述源控制器及所述目标控制器属于一模板控制器,所述模板控制器具有对应于至少一基元的至少一低阶控制器,所述控制目标直接被指派至所述至少一低阶控制器。
11、较佳的是,其中所述控制目标的输入包含至少一物理参数控制量。
12、综上所述,本发明提出的自动分类过渡动作的方法可以具有下列贡献或功效:其一是允许使用者选择不同风格的过渡动作,其二是能够自动产生不同风格的过渡动作。
13、以上的关于本申请内容的说明及以下的实施方式的说明是用以示范与解释本发明的精神与原理,并且提供本发明的权利要求书更进一步的解释。
技术特征:
1.一种自动分类过渡动作的方法,其特征在于,包括以运算装置执行下列步骤:
2.如权利要求1所述自动分类过渡动作的方法,其特征在于,所述多个过渡特性包括质心高度以及前进加速度。
3.如权利要求1所述自动分类过渡动作的方法,其特征在于,其中所述分类算法为k-平均算法,且所述k值是以手肘方法产生。
4.如权利要求1所述自动分类过渡动作的方法,其特征在于,其中所述分类算法为阶层式分群法。
5.如权利要求1所述自动分类过渡动作的方法,其特征在于,其中所述多个过渡动作的每一个包括多个关键信息框。
6.如权利要求1所述自动分类过渡动作的方法,其特征在于,其中取得所述多个过渡动作包括:以一复杂运动控制器产生所述多个过渡动作,所述转换机制为所述过渡张量,且所述自动分类过渡动作的方法更包括:
7.如权利要求6所述自动分类过渡动作的方法,其特征在于,其中每一所述多个过渡质量包括一稳定值,所述稳定值是所述处理器基于多个邻近相位及所述多个相位中的其中之一,依据所述存活指标的一存活机率、所述结果值的一局部邻域、关联于所述局部邻域的一过渡结果计算得到,其中所述局部邻域包括多个参考相位,所述多个参考相位对应于所述结果值对应的所述过渡张量对应的所述源运动的所述多个相位中的一个。
8.如权利要求6所述自动分类过渡动作的方法,其特征在于,其中依据所述多个结果计算多个过渡质量包括:
9.如权利要求6所述自动分类过渡动作的方法,其特征在于,其中所述源控制器或所述目标控制器依据一当前状态及一控制目标产生所述源运动及所述目标运动,所述源控制器及所述目标控制器属于一模板控制器,所述模板控制器具有对应于至少一基元的至少一低阶控制器,所述控制目标直接被指派至所述至少一低阶控制器。
10.如权利要求6所述自动分类过渡动作的方法,其特征在于,其中所述控制目标的输入包含至少一物理参数控制量。
技术总结
一种自动分类过渡动作的方法,包括以运算装置执行下列步骤:取得多个过渡动作,每个过渡动作关联于源动作、目标动作及从源动作转换至目标动作的转换机制,从每个过渡动作撷取特性向量,从而产生多个特性向量,其中每个特性向量的包括多个过渡特性,以及依据这些特性向量执行分类算法以产生多个过渡类型。
技术研发人员:吴信福,罗应升,陈佩君
受保护的技术使用者:英业达科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!