一种机器人分房间算法的评分方法、装置、系统及芯片与流程
本发明涉及图像算法处理,具体涉及一种机器人分房间算法的评分方法、装置、系统及芯片。
背景技术:
1、目前机器人分房间算法的类型繁多且层出不穷,机器人分房间算法是指基于机器人传感器获取的信息区分空间中不同的房间和走廊的算法,以便于机器人能够基于分好的房间规划最佳工作路径。因此,机器人分房间算法的优劣直接影响机器人规划的工作路径的优劣,从而影响机器人工作效率的高低,而如何评估各机器人分房间算法的优劣情况是目前急需解决的问题。
技术实现思路
1、为解决上述问题,本发明提供了一种机器人分房间算法的评分方法、装置、系统及芯片,实现对机器人分房间算法的优劣情况的评分,以便于采用最优的机器人分房间算法,提升机器人规划最优工作路径的有效程度,从而提高机器人工作效率。本发明的具体技术方案如下:
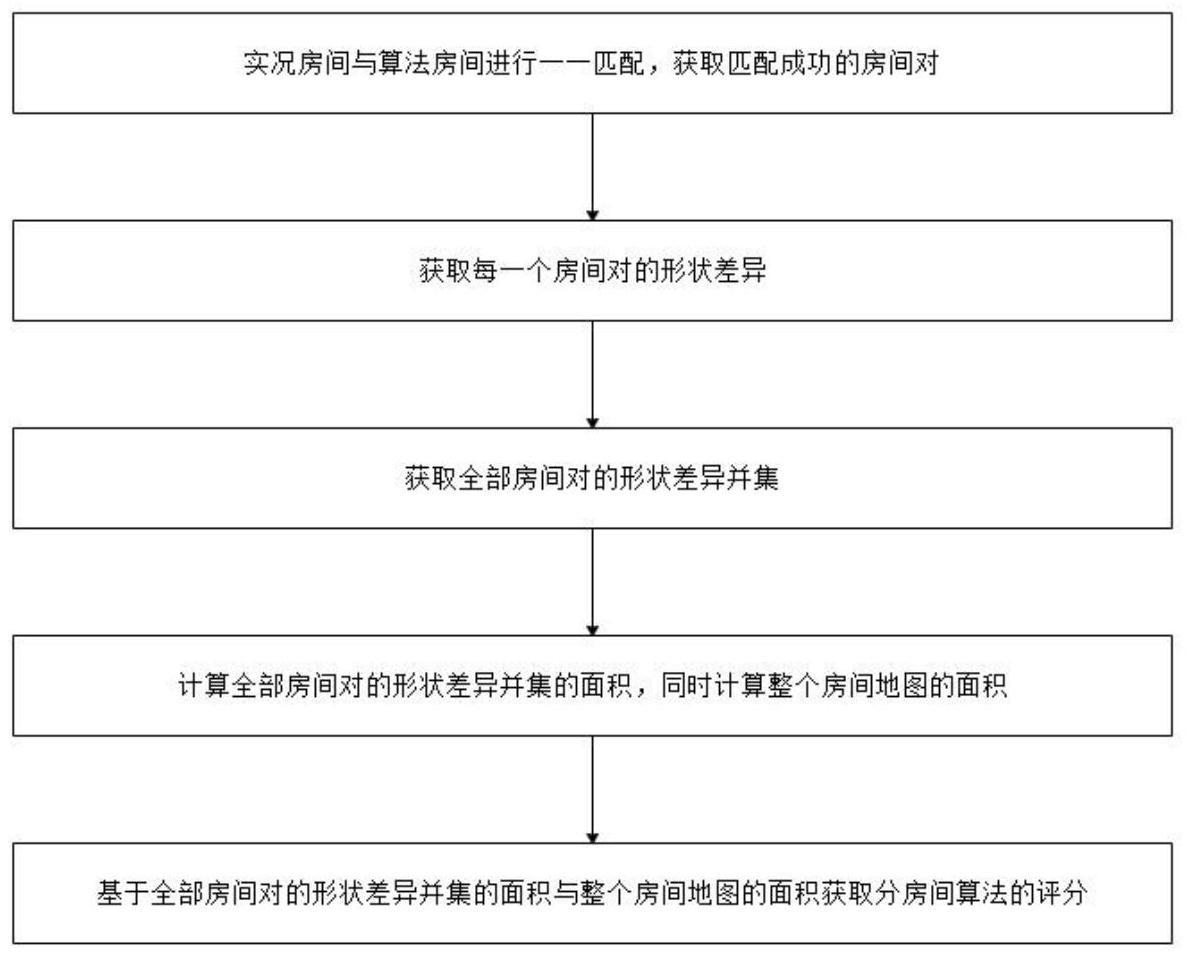
2、一种机器人分房间算法的评分方法,包括:将基于地面实况获取的实况房间与基于机器人分房间算法获取的算法房间进行一一匹配,获取匹配成功的房间对;获取每一个房间对的形状差异;计算全部房间对的形状差异并集的面积,同时计算整个房间地图的面积;基于全部房间对的形状差异并集的面积与整个房间地图的面积获取机器人分房间算法的评分。
3、进一步地,所述将通过地面实况获取的房间与通过机器人分房间算法获取的房间进行一一匹配的方法,具体包括:步骤1:遍历计算基于机器人分房间算法获取的每一个算法房间与基于地面实况获取的每一个实况房间之间的距离,获取算法房间与实况房间距离结果集合;步骤2:从算法房间与实况房间距离结果集合中选择出最短距离结果对应的算法房间和实况房间匹配为一个房间对,并将该房间对的算法房间和实况房间分别涉及的距离结果从算法房间与实况房间距离结果集合中删除,重复执行步骤2,直至算法房间与实况房间距离结果集合为空,结束匹配。
4、进一步地,所述获取每一个房间对的形状差异的方法,具体包括:采用多边形的布尔运算对每一个房间对中实况房间与算法房间进行异或运算以获取两者的形状差异。
5、进一步地,所述评分方法还包括:当存在未能与实况房间匹配成功的算法房间,或者,当存在未能与算法房间匹配成功的实况房间,则将未能匹配成功的算法房间或实况房间作为一个房间对的形状差异。
6、进一步地,所述获取并计算全部房间对的形状差异并集的面积的方法,具体包括:采用多边形的布尔运算对每一个房间对的形状差异进行并集运算以获取全部房间对的形状差异并集;获取全部房间对的形状差异并集的各顶点坐标,基于全部房间对的形状差异并集的各顶点坐标计算全部房间对的形状差异并集的面积。
7、进一步地,所述基于全部房间对的形状差异并集的面积与整个房间地图的面积获取机器人分房间算法的评分的方法,具体包括:计算全部房间对的形状差异并集的面积占整个房间地图的面积的比例;将全部房间对的形状差异并集的面积占整个房间地图的面积的比例与预设参数的乘积作为该机器人分房间算法的评分;其中,机器人分房间算法的评分越高代表该机器人分房间算法的分房间结果与地面实况的分房间结果差异越大,该机器人分房间算法的分房间效果越差。
8、进一步地,本发明还公开一种机器人分房间算法的评分装置,包括:实况房间获取模块,用于接收通过地面实况信息获取的实况房间并传输至房间匹配模块;算法房间获取模块,用于接收通过机器人分房间算法获取的算法房间并传输至房间匹配模块;房间匹配模块,用于对实况房间和算法房间进行一一匹配,获取匹配成功的房间对;房间对形状差异信息计算模块,用于获取每一个房间对的形状差异并计算全部房间对的形状差异并集的面积;房间地图面积计算模块,用于计算整个房间地图的面积;评分计算模块,用于根据房间对形状差异信息计算模块计算的全部房间对的形状差异并集的面积和房间地图面积计算模块计算的整个房间地图的面积生成该机器人分房间算法的评分。
9、进一步地,本发明还公开一种机器人分房间算法的评分系统,所述评分系统包括:一个以上的如前所述的机器人分房间算法的评分装置,用于基于各机器人分房间算法的分房间信息、基于地面实况信息获取的实况房间和房间地图信息生成各机器人分房间算法的评分并传输至目标终端;目标终端,用于接收各机器人分房间算法的评分,并对各机器人分房间算法根据其对应的评分进行比较,选出其中分房间效果最优的机器人分房间算法;其中,所述机器人分房间算法的分房间信息至少包括基于机器人分房间算法获取的全部算法房间。
10、进一步地,所述机器人分房间算法的评分装置还将其评分机制传输至目标终端;其中,所述评分机制至少包括所述机器人分房间算法的评分装置输出的评分的高低与机器人分房间算法的分房间效果的优劣之间的关系。
11、进一步地,所述目标终端包括显示模块;其中,所述显示模块用于展示各机器人分房间算法的相关信息和所述机器人分房间算法的评分装置的评分机制;其中,所述机器人分房间算法的相关信息至少包括名称和其评分。
12、进一步地,所述目标终端还包括比较模块;其中,所述比较模块用于接收的各机器人分房间算法的评分和所述机器人分房间算法的评分装置的评分机制,并根据评分机制对各机器人分房间算法的评分进行大小比较,选择其中分房间效果最优的机器人分房间算法,并将其相关信息传输至显示模块;所述显示模块还用于展示所述分房间效果最优的机器人分房间算法的相关信息;其中,所述分房间效果最优的机器人分房间算法的相关信息至少包括名称。
13、进一步地本发明还公开一种芯片,内部存储有计算机程序,所述芯片内部存储的计算机程序被处理器运行时执行如前所述的机器人分房间算法的评分方法。
14、本发明的有益效果在于:通过对机器人分房间算法获取的算法房间与基于地面实况获取的实况房间匹配房间对并计算房间对的形状差异,通过形状差异的面积总和与整个房间地图的面积确定机器人分房间算法的评分,使得机器人分房间算法的优劣情况通过分数的形式展现,用户能够通过评估分数直观确定各机器人分房间算法的优劣情况,实现对机器人分房间算法的优劣情况的评分,以便于用户采用最优的机器人分房间算法,基于最优的机器人分房间算法提升机器人规划最优工作路径的有效程度,从而提高机器人工作效率。
技术特征:
1.一种机器人分房间算法的评分方法,其特征在于,所述评分方法包括:
2.根据权利要求1所述的机器人分房间算法的评分方法,其特征在于,所述将通过地面实况获取的房间与通过机器人分房间算法获取的房间进行一一匹配的方法,具体包括:
3.根据权利要求1所述的机器人分房间算法的评分方法,其特征在于,所述获取每一个房间对的形状差异的方法,具体包括:
4.根据权利要求1所述的机器人分房间算法的评分方法,其特征在于,所述评分方法还包括:当存在未能与实况房间匹配成功的算法房间,或者,当存在未能与算法房间匹配成功的实况房间,则将未能匹配成功的算法房间或实况房间作为一个房间对的形状差异。
5.根据权利要求1所述的机器人分房间算法的评分方法,其特征在于,所述获取并计算全部房间对的形状差异并集的面积的方法,具体包括:
6.根据权利要求1所述的机器人分房间算法的评分方法,其特征在于,所述基于全部房间对的形状差异并集的面积与整个房间地图的面积获取机器人分房间算法的评分的方法,具体包括:
7.一种机器人分房间算法的评分装置,其特征在于,所述评分装置包括:
8.一种机器人分房间算法的评分系统,其特征在于,所述评分系统包括:
9.根据权利要求8所述的机器人分房间算法的评分系统,其特征在于,所述机器人分房间算法的评分装置还将其评分机制传输至目标终端;其中,所述评分机制至少包括所述机器人分房间算法的评分装置输出的评分的高低与机器人分房间算法的分房间效果的优劣之间的关系。
10.根据权利要求9所述的机器人分房间算法的评分系统,其特征在于,所述目标终端包括显示模块;其中,所述显示模块用于展示各机器人分房间算法的相关信息和所述机器人分房间算法的评分装置的评分机制;其中,所述机器人分房间算法的相关信息至少包括名称和其评分。
11.根据权利要求10所述的机器人分房间算法的评分系统,其特征在于,所述目标终端还包括比较模块;其中,所述比较模块用于接收的各机器人分房间算法的评分和所述机器人分房间算法的评分装置的评分机制,并根据评分机制对各机器人分房间算法的评分进行大小比较,选择其中分房间效果最优的机器人分房间算法,并将其相关信息传输至显示模块;所述显示模块还用于展示所述分房间效果最优的机器人分房间算法的相关信息;其中,所述分房间效果最优的机器人分房间算法的相关信息至少包括名称。
12.一种芯片,内部存储有计算机程序,其特征在于,所述芯片内部存储的计算机程序被处理器运行时执行如权利要求1至6任意一项所述的机器人分房间算法的评分方法。
技术总结
本发明公开一种机器人分房间算法的评分方法、装置、系统及芯片,评分方法包括:将基于地面实况获取的实况房间与基于机器人分房间算法获取的算法房间进行一一匹配,获取匹配成功的房间对;获取每一个房间对的形状差异;获取并计算全部房间对的形状差异并集的面积,同时计算整个房间地图的面积;基于全部房间对的形状差异并集的面积与整个房间地图的面积获取机器人分房间算法的评分。本发明使得机器人分房间算法的优劣情况能够直观通过分数展现,以便于用户采用最优的机器人分房间算法,基于最优的机器人分房间算法提升机器人规划最优工作路径的效果,从而提高机器人工作效率。
技术研发人员:张子倩,黄惠保,陈锦杰,游思遐
受保护的技术使用者:珠海一微半导体股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!