一种镜子调整方法、装置、智能设备及存储介质与流程
本申请涉及计算机,具体涉及一种镜子调整方法、装置、智能设备及存储介质。
背景技术:
1、随着科技的发展,智能镜子越来越广泛地受到用户的使用。然而通常智能化妆镜的尺寸受限于桌子的面积,一般是刚好可以覆盖正面人脸大小,当用户需要照看脸部各个侧面部位时,镜面就无法展示完整的人脸,而需要用户来回移动头部或者手动调整镜面角度,才能让脸部完整地显示在镜子中,这样导致智能镜子调整效率低,用户使用体验不高。
技术实现思路
1、本申请实施例提供一种镜子调整方法、装置、智能设备及存储介质,可以提高智能镜子的调整效率。
2、为解决上述技术问题,本申请实施例提供以下技术方案:
3、本申请实施例提供了一种镜子调整方法,包括:
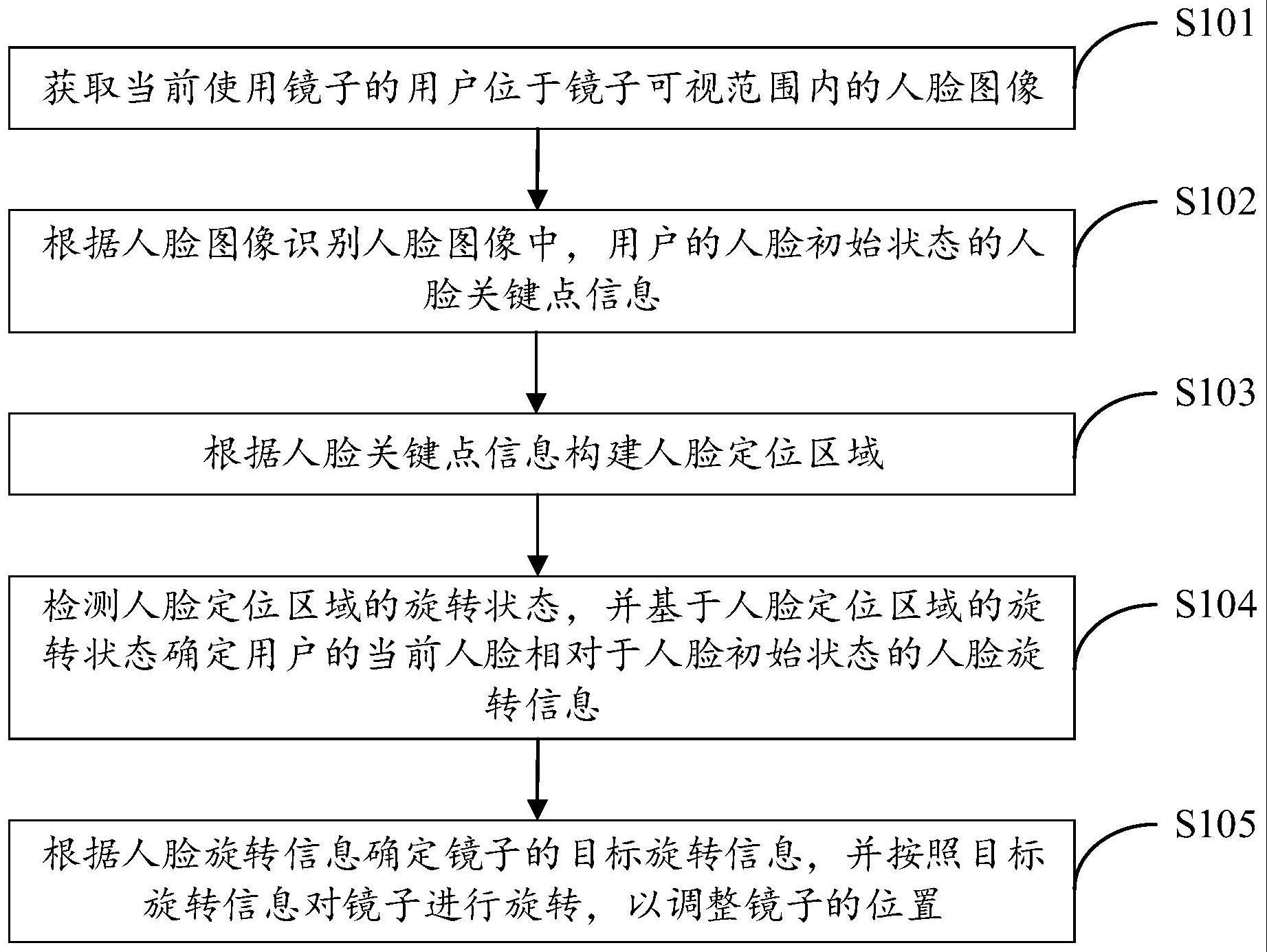
4、获取当前使用镜子的用户位于所述镜子可视范围内的人脸图像;
5、根据所述人脸图像识别所述人脸图像中,所述用户的人脸初始状态的人脸关键点信息;
6、根据所述人脸关键点信息构建人脸定位区域;
7、检测所述人脸定位区域的旋转状态,并基于所述人脸定位区域的旋转状态确定所述用户的当前人脸相对于人脸初始状态的人脸旋转信息;
8、根据所述人脸旋转信息确定所述镜子的目标旋转信息,并按照所述目标旋转信息对所述镜子进行旋转,以调整所述镜子的位置。
9、在一实施方式中所述人脸关键点信息包括人脸关键点的位置,所述检测所述人脸定位区域的旋转状态,包括:
10、检测所述人脸关键点的位置;
11、根据所述人脸关键点的位置,确定所述人脸定位区域的旋转状态。
12、在一实施方式中,所述人脸关键点包括所述用户的两只眼睛分别对应的第一关键点与第二关键点,以及所述用户的嘴巴对应的第三关键点,所述根据所述人脸关键点的位置,确定所述人脸定位区域的旋转状态,包括:
13、根据所述第三关键点的位置,确定所述第三关键点相对于人脸初始状态的位移方向;
14、根据所述第一关键点的位置以及所述第二关键点的位置,计算所述第一关键点以及第二关键点之间的第一距离;
15、根据所述第一关键点的位置、第二关键点的位置以及第三关键点的位置,计算所述第三关键点到所述第一关键点以及第二关键点所在直线的第二距离;
16、根据所述第一距离与第二距离中的至少一种,以及所述位移方向,计算所述人脸定位区域相对于人脸初始状态的旋转状态。
17、在一实施方式中,所述位移方向包括水平方向、垂直方向以及自由方向,所述旋转状态包括旋转方向,所述根据所述第一距离与第二距离中的至少一种,以及所述位移方向,计算所述人脸定位区域相对于人脸初始状态的旋转状态,包括:
18、若所述位移方向为水平方向,则根据所述位移方向以及所述第一距离计算所述人脸定位区域相对于人脸初始状态的左右方向旋转状态;
19、若所述位移方向为垂直方向,则根据所述位移方向以及所述第二距离计算所述人脸定位区域相对于人脸初始状态的上下方向旋转状态;
20、若所述位移方向为自由方向,则根据所述位移方向以及所述第一距离以及所述第二距离计算所述人脸定位区域相对于人脸初始状态的自由方向旋转状态,其中,所述自由方向旋转状态基于所述左右方向旋转状态以及所述上下方向旋转状态计算得到。
21、在一实施方式中,所述人脸旋转信息包括人脸旋转方向以及人脸旋转角度,所述基于所述人脸定位区域的旋转状态确定所述用户的当前人脸相对于人脸初始状态的人脸旋转信息,包括:
22、基于所述人脸定位区域的旋转方向,获取所述第一距离以及第一初始距离,或者,所述第二距离以及第二初始距离,其中,所述第一初始距离为人脸初始状态时所述第一关键点以及第二关键点的距离,所述第二初始距离为人脸初始状态时所述第三关键点到所述第一关键点以及第二关键点所在直线的距离;
23、计算所述第一距离与所述第一初始距离的第一百分比,以及所述第二距离与所述第二初始距离的第二百分比中的至少一种;
24、根据所述第一百分比以及所述第二百分比中的至少一种,确定匹配的所述人脸旋转角度。
25、在一实施方式中,所述目标旋转信息包括目标旋转方向以及目标旋转角度,所述根据所述人脸旋转信息确定所述镜子的目标旋转信息,包括:
26、获取所述人脸旋转方向以及旋转角度;
27、根据所述人脸旋转方向确定匹配的所述镜子的目标旋转方向,根据所述人脸旋转角度确定所述目标旋转角度。
28、在一实施方式中,所述镜子调整方法还包括:
29、检测到当前使用镜子的用户位于所述镜子可视范围内时,输出针对所述镜子的调整提示,以提示用户调整所述镜子至镜子初始状态,其中,所述镜子初始状态的镜子所在平面与所述人脸定位区域所在平面平行。
30、根据本申请的一个方面,还提供了一种镜子调整装置,包括:
31、获取模块,用于获取当前使用镜子的用户位于所述镜子可视范围内的人脸图像;
32、识别模块,用于根据所述人脸图像识别所述人脸图像中,所述用户的人脸初始状态的人脸关键点信息;
33、构建模块,用于根据所述人脸关键点信息构建人脸定位区域;
34、确定模块,用于检测所述人脸定位区域的旋转状态,并基于所述人脸定位区域的旋转状态确定所述用户的当前人脸相对于人脸初始状态的人脸旋转信息;
35、调整模块,用于根据所述人脸旋转信息确定所述镜子的目标旋转信息,并按照所述目标旋转信息对所述镜子进行旋转,以调整所述镜子的位置。
36、根据本申请的一个方面,还提供了一种智能设备,包括处理器和存储器,所述存储器中存储有计算机程序,所述处理器调用所述存储器中的计算机程序时执行本申请实施例提供的任一种镜子调整方法。
37、根据本申请的一个方面,还提供了一种存储介质,所述存储介质用于存储计算机程序,所述计算机程序被处理器加载,以执行本申请实施例提供的任一种镜子调整方法。
38、本申请实施例可以获取当前使用镜子的用户位于所述镜子可视范围内的人脸图像;根据所述人脸图像识别所述人脸图像中,所述用户的人脸初始状态的人脸关键点信息;根据所述人脸关键点信息构建人脸定位区域;检测所述人脸定位区域的旋转状态,并基于所述人脸定位区域的旋转状态确定所述用户的当前人脸相对于人脸初始状态的人脸旋转信息;根据所述人脸旋转信息确定所述镜子的目标旋转信息,并按照所述目标旋转信息对所述镜子进行旋转,以调整所述镜子的位置。这样智能设备可以通过识别用户的人脸图像中的人脸关键点信息,从而基于人脸关键点信息计算人脸旋转信息,根据人脸旋转信息自动按照匹配的目标旋转信息调整镜子,而无需手动调整镜子,提高了镜子调整效率。
技术特征:
1.一种镜子调整方法,其特征在于,所述方法包括:
2.根据权利要求1所述的镜子调整方法,其特征在于,所述人脸关键点信息包括人脸关键点的位置,所述检测所述人脸定位区域的旋转状态,包括:
3.根据权利要求2所述的镜子调整方法,其特征在于,所述人脸关键点包括所述用户的两只眼睛分别对应的第一关键点与第二关键点,以及所述用户的嘴巴对应的第三关键点,所述根据所述人脸关键点的位置,确定所述人脸定位区域的旋转状态,包括:
4.根据权利要求3所述的镜子调整方法,其特征在于,所述位移方向包括水平方向、垂直方向以及自由方向,所述旋转状态包括旋转方向,所述根据所述第一距离与第二距离中的至少一种,以及所述位移方向,计算所述人脸定位区域相对于人脸初始状态的旋转状态,包括:
5.根据权利要求3所述的镜子调整方法,其特征在于,所述人脸旋转信息包括人脸旋转方向以及人脸旋转角度,所述基于所述人脸定位区域的旋转状态确定所述用户的当前人脸相对于人脸初始状态的人脸旋转信息,包括:
6.根据权利要求5任一项所述的镜子调整方法,其特征在于,所述目标旋转信息包括目标旋转方向以及目标旋转角度,所述根据所述人脸旋转信息确定所述镜子的目标旋转信息,包括:
7.根据权利要求1所述的镜子调整方法,其特征在于,所述镜子调整方法还包括:
8.一种镜子调整装置,其特征在于,包括:
9.一种智能设备,其特征在于,包括处理器和存储器,所述存储器中存储有计算机程序,所述处理器调用所述存储器中的计算机程序时执行如权利要求1至7任一项所述的镜子调整方法。
10.一种存储介质,其特征在于,所述存储介质用于存储计算机程序,所述计算机程序被处理器加载以执行权利要求1至7任一项所述的镜子调整方法。
技术总结
本申请实施例公开了一种镜子调整方法、装置、智能设备及存储介质,本申请实施例可以获取当前使用镜子的用户位于所述镜子可视范围内的人脸图像;根据所述人脸图像识别所述人脸图像中,所述用户的人脸初始状态的人脸关键点信息;根据所述人脸关键点信息构建人脸定位区域;检测所述人脸定位区域的旋转状态,并基于所述人脸定位区域的旋转状态确定所述用户的当前人脸相对于人脸初始状态的人脸旋转信息;根据所述人脸旋转信息确定所述镜子的目标旋转信息,并按照所述目标旋转信息对所述镜子进行旋转,以调整所述镜子的位置。解决了手动对镜子进行调整效率低的技术问题,提高了镜子调整效率。
技术研发人员:吴薇茜,汤达坚
受保护的技术使用者:惠州TCL移动通信有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!