面向AIS船舶轨迹大数据的航道边界和中心线挖掘方法及系统与流程
面向ais船舶轨迹大数据的航道边界和中心线挖掘方法及系统
技术领域
1.本发明涉及信息技术领域,具体地,涉及面向ais船舶轨迹大数据的航道边界和中心线挖掘方法及系统,更为具体地,涉及一种面向ais船舶轨迹大数据的,基于航迹点集形状重构的航道边界和中心线挖掘技术。
背景技术:
2.基于图像识别的陆地交通路网识别已经是一种成熟的技术,而基于海洋影像的航道区域识别却难以使用相似的方法实现。
3.目前,海洋航道识别主要依赖人工测量及高分遥感图像,其缺点主要在于测量人工以及遥感设备的成本过高,且实时性较差。船舶自动识别系统(automaticidentification system,ais)提供了丰富的众源船舶轨迹数据,具有廉价,高更新频率等特性。面向ais船舶轨迹大数据的水上航道挖掘技术对比依赖人工测量或高分遥感图像的航道识别技术具有更强的可用性。
4.目前已有的面向ais轨迹大数据的航道挖掘技术主要基于空间密度噪音聚类技术,利用轨迹簇中心和簇边缘的航迹分别作为航道中心线和航道边界的近似。此类挖掘方法的效果对聚类算法的参数选择较为敏感,且容易受到簇中心以及边缘轨迹中的噪音点影响,难以精准的刻画实际航道的几何特征。
5.专利文献cn112487116a(申请号:202011298608.9)公开了一种基于ais大数据的船舶航迹分析方法,数据清洗子模块将明显异常的数据更正过来,单条航道停留点子模块根据清洗后的数据计算出单条航道停留点,多条航道停留点聚类子模块在单航道停留点基础上进行聚类,得到多条航道停留点,确保航道分析原始数据的准确性,数据通过douglas-peucker算法压缩轨迹数据后,采用lcss算法找出两段轨迹相似的部分,同时通过动态时间规整dynamic time warping(dtw)运算出航迹之间的相似度,采用dbscan算法将相似航迹聚类,通过图形描边算法和lcss相似性算法结合实际业务场景进行航迹挖掘,多种算法的融合使用,提高了航迹挖掘的速度与精准度。
技术实现要素:
6.针对现有技术中的缺陷,本发明的目的是提供一种面向ais船舶轨迹大数据的航道边界和中心线挖掘方法及系统。
7.根据本发明提供的一种面向ais船舶轨迹大数据的航道边界和中心线挖掘方法,包括:
8.步骤s1:将ais船舶轨迹数据的航迹点进行delaunay三角网化,基于航迹点三角网中的三角形进行筛选得到航迹点的原始边界;
9.步骤s2:对获取的航迹点的原始边界进行平滑处理,基于平滑处理后航迹点原始边界的顶点点集进一步进行delaunay三角网化,基于顶点点集三角网进行筛选得到航道轮
廓;
10.步骤s3:基于航道轮廓构建航道图及航道的中心线。
11.优选地,所述步骤s1采用:
12.步骤s1.1:对原始ais船舶航迹大数据进行预处理,按照固定时间间隔对预处理后的ais船舶航迹大数据进行均匀采样;
13.步骤s1.2:将经纬度坐标转化为地理哈希值;
14.步骤s1.3:根据地理哈希值出现的频次分布利用最大化类间方差算法得到哈希值频次筛选阈值,保留出现频次高于筛选阈值的地理哈希值对应的坐标,并作为近似的航迹边界候选点,将近似的航迹边界候选点映射到笛卡尔平面坐标得到航迹点的平面点集;
15.步骤s1.4:使用delaunay三角剖分技术重构平面航迹点集的形状,并将得到的航迹点三角网中的三角形进行三角空洞指数筛选,在剩余的三角网中提取外部边界得到航迹点的原始边界。
16.优选地,所述对原始ais船舶航迹大数据进行预处理采用:原始ais船舶轨迹大数据利用地理哈希技术将船舶轨迹坐标网格化,得到网格化后的ais船舶轨迹大数据。
17.优选地,所述步骤s2采用:
18.步骤s2.1:对航迹点的原始边界进行平滑处理得到精化的航道多边形边界;
19.步骤s2.2:基于精化的航道多边形边界提取航道边界顶点点集,提取的航道边界顶点点集进一步提取delaunay三角网并剔除航道边界外部的三角形,得到航道轮廓。
20.优选地,所述步骤s2.1采用:使用毛刺边去除以及中值滤波技术对航迹点的原始边界进行平滑处理后得到精化的航道多边形边界。
21.优选地,所述步骤s2.2采用:提取的航道边界顶点点集使用delaunay三角剖分技术得到新的三角网,新的三角网通过三角形重心坐标筛选出航道边界内部的三角形;
22.所述航道内部的三角形包括单邻三角网、双邻三角网以及三邻三角网。
23.优选地,所述步骤s3采用:航道图的顶点由特定三角形的重心构成,航道图的边由其余三角形在私有边上的中位线构成;所述航道中心线为提取的航道图中的边;
24.所述特定三角形包括单邻三角网或三邻三角网;
25.通过航道图提取算法从任意单邻三角形开始,对航道三角网进行深度优先遍历,从单邻三角形共有边方向创建一条航道边,边的初始线段是航道顶点到共有边中点的线段;
26.根据遍历到的三角形类别进行不同的操作:若是边三角形,则提取其私有边上的中位线,并添加至当前航道边中;若是顶点三角形,则闭合当前航道边,并在其他共有边方向创建一条新的航道边;直到所有三角形遍历完成;
27.所述边三角形是相邻三角形的数量为偶数的三角形;
28.所述顶点三角形是相邻三角形数量为奇数的三角形。
29.根据本发明提供的一种面向ais船舶轨迹大数据的航道边界和中心线挖掘系统,包括:
30.模块m1:将ais船舶轨迹数据的航迹点进行delaunay三角网化,基于航迹点三角网中的三角形进行筛选得到航迹点的原始边界;
31.模块m2:对获取的航迹点的原始边界进行平滑处理,基于平滑处理后航迹点原始
边界的顶点点集进一步进行delaunay三角网化,基于顶点点集三角网进行筛选得到航道轮廓;
32.模块m3:基于航道轮廓构建航道图及航道的中心线。
33.优选地,所述模块m1采用:
34.模块m1.1:对原始ais船舶航迹大数据进行预处理,按照固定时间间隔对预处理后的ais船舶航迹大数据进行均匀采样;
35.模块m1.2:将经纬度坐标转化为地理哈希值;
36.模块m1.3:根据地理哈希值出现的频次分布利用最大化类间方差算法得到哈希值频次筛选阈值,保留出现频次高于筛选阈值的地理哈希值对应的坐标,并作为近似的航迹边界候选点,将近似的航迹边界候选点映射到笛卡尔平面坐标得到航迹点的平面点集;
37.模块m1.4:使用delaunay三角剖分技术重构平面航迹点集的形状,并将得到的航迹点三角网中的三角形进行三角空洞指数筛选,在剩余的三角网中提取外部边界得到航迹点的原始边界;
38.所述对原始ais船舶航迹大数据进行预处理采用:原始ais船舶轨迹大数据利用地理哈希技术将船舶轨迹坐标网格化,得到网格化后的ais船舶轨迹大数据;
39.所述模块m2采用:
40.模块m2.1:对航迹点的原始边界进行平滑处理得到精化的航道多边形边界;
41.模块m2.2:基于精化的航道多边形边界提取航道边界顶点点集,提取的航道边界顶点点集进一步提取delaunay三角网并剔除航道边界外部的三角形,得到航道轮廓;
42.所述模块m2.1采用:使用毛刺边去除以及中值滤波技术对航迹点的原始边界进行平滑处理后得到精化的航道多边形边界;
43.所述模块m2.2采用:提取的航道边界顶点点集使用delaunay三角剖分技术得到新的三角网,新的三角网通过三角形重心坐标筛选出航道边界内部的三角形;
44.所述航道内部的三角形包括单邻三角网、双邻三角网以及三邻三角网。
45.优选地,所述模块m3采用:航道图的顶点由特定三角形的重心构成,航道图的边由其余三角形在私有边上的中位线构成;所述航道中心线为提取的航道图中的边;
46.所述特定三角形包括单邻三角网或三邻三角网;
47.通过航道图提取算法从任意单邻三角形开始,对航道三角网进行深度优先遍历,从单邻三角形共有边方向创建一条航道边,边的初始线段是航道顶点到共有边中点的线段;
48.根据遍历到的三角形类别进行不同的操作:若是边三角形,则提取其私有边上的中位线,并添加至当前航道边中;若是顶点三角形,则闭合当前航道边,并在其他共有边方向创建一条新的航道边;直到所有三角形遍历完成;
49.所述边三角形是相邻三角形的数量为偶数的三角形;
50.所述顶点三角形是相邻三角形数量为奇数的三角形。
51.与现有技术相比,本发明具有如下的有益效果:
52.1、本发明面向ais船舶轨迹大数据进行航道挖掘,对比传统的基于人工测绘或高分遥感图像的航道识别方法更廉价高效,可用性更高;
53.2、本发明利用航迹点轮廓提取挖掘航道边界和中心线,对比基于空间密度噪音聚
类的方法挖掘的航道边界和中心线更平滑,几何特征更贴近真实的自然水环境;为研究水上交通规律,水环境分析,航道宽度推算等问题提供了有效的方法和参考;
54.3、本发明通过地理哈希技术对原始轨迹坐标进行网格化编码,可以有效的抑制原始坐标数据的噪音,使得频项挖掘算法的效果更具有鲁棒性;
55.4、本发明的航道区域的空间颗粒度,得益于地理哈希技术的动态性,具有可伸缩性(对比传统手工网格化编码)。即可以根据实际使用需要,通过增加或者减少地理哈希值的长度使得航道区域的粒度变得更细或者更粗;
56.5、本发明使用的最大化类间方差算法进行地理哈希值的频次筛选,是一种数据驱动的方法。可以有效的避免因在近海,远海等不同环境中由于ais数据采样密度不统一问题引起的筛选阈值选择困难;
57.5、本发明对初步提取的航道边界进行了去除短边和毛刺等后处理工作,避免挖掘了出的航道边界过窄过险等不符合自然情况的现象;
58.6、本发明提取的航道边界以及中心线具有一贯性。可以直接利用本发明的结果进一步进行航道几何特征的挖掘,如航道可航行宽度的推算(参阅图8)可以直接提取三角网中三角形私有边上的高得到。
附图说明
59.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
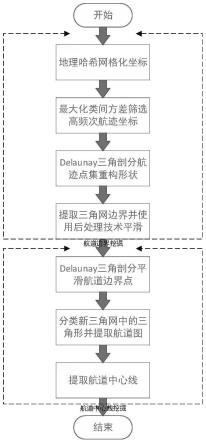
60.图1为本发明技术流程示意图。
61.图2为三角形空洞指数示意图。
62.图3为航道区域原始三角网示意图。
63.图4为空洞指数过滤三角网示意图。
64.图5为航道边界平滑效果图。
65.图6为航道三角形分类示意图。
66.图7为航道图构建示意图。
67.图8为渤海海域航道边界及中心线挖掘效果图。
具体实施方式
68.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
69.针对现有技术中的缺陷,本发明提供一种面向ais船舶轨迹大数据的,基于航迹点集形状重构的航道边界和中心线挖掘技术。旨在提高航道边界和中心线挖掘识别的精准性和效率,以及降低航道识别的成本。
70.本发明公开了一种面向ais船舶轨迹大数据的航道边界和中心线挖掘技术。该技术将ais船舶轨迹数据的航迹点进行delaunay三角网化,通过提取三角网轮廓来挖掘水上航行区域的多边形边界与航道中心线。
71.实施例1
72.根据本发明提供的一种面向ais船舶轨迹大数据的航道边界和中心线挖掘方法,包括:
73.步骤s1:将ais船舶轨迹数据的航迹点进行delaunay三角网化,基于航迹点三角网中的三角形进行筛选得到航迹点的原始边界;
74.步骤s2:对获取的航迹点的原始边界进行平滑处理,基于平滑处理后航迹点原始边界的顶点点集进一步进行delaunay三角网化,基于顶点点集三角网进行筛选得到航道轮廓;
75.步骤s3:基于航道轮廓构建航道图及航道的中心线。
76.具体地,所述步骤s1采用:
77.步骤s1.1:对原始ais船舶航迹大数据进行预处理,按照固定时间间隔对预处理后的ais船舶航迹大数据进行均匀采样;
78.步骤s1.2:将经纬度坐标转化为地理哈希值;
79.步骤s1.3:根据地理哈希值出现的频次分布利用最大化类间方差算法得到哈希值频次筛选阈值,保留出现频次高于筛选阈值的地理哈希值对应的坐标,起到抑制数据噪声的作用,并作为近似的航迹边界候选点,将近似的航迹边界候选点映射到笛卡尔平面坐标得到航迹点的平面点集;其中,所述最大化类间方差算法是灰度图像二值化处理中常用的方法,通过遍历二值化阈值,最大化目标区域与背景区域之间的方差的方法达到图像二值化的目的。本发明利用最大化类间方差最大化淘汰的地理哈希值和保留的地理哈希值的频次方差,达到地理哈希值筛选的目的。
80.步骤s1.4:使用delaunay三角剖分技术重构平面航迹点集的形状,并将得到的航迹点三角网中的三角形进行三角空洞指数筛选,在剩余的三角网中提取外部边界得到航迹点的原始边界。其中,所述delaunay三角剖分技术是一种将平面离散点集转换位三角网格数据的图形分析技术。delaunay三角剖分具有通过最大化最小角使三角网最接近规则化,以及任意四点不能共圆的唯一性两个特点。剖分算法通过在平面点集上构造凸包,并不断连接相邻凸包边组成的三角形构建三角网,直到没有可用边。
81.具体地,所述对原始ais船舶航迹大数据进行预处理采用:原始ais船舶轨迹大数据利用地理哈希技术将船舶轨迹坐标网格化,得到网格化后的ais船舶轨迹大数据。其中,所述地理哈希技术是一个将二维坐标编码为字符串的过程。地理哈希技术通过不断使用二分法来缩小经度和纬度的区间来进行二进制编码,最后将经纬度分别产生的编码奇偶位交叉合并,最后将二进制串转化为base32字符串。
82.具体地,所述步骤s2采用:
83.步骤s2.1:对航迹点的原始边界进行平滑处理得到精化的航道多边形边界;
84.步骤s2.2:基于精化的航道多边形边界提取航道边界顶点点集,提取的航道边界顶点点集进一步提取delaunay三角网并剔除航道边界外部的三角形,得到航道轮廓。
85.具体地,所述步骤s2.1采用:使用毛刺边去除以及中值滤波技术对航迹点的原始边界进行平滑处理后得到精化的航道多边形边界。
86.具体地,所述步骤s2.2采用:提取的航道边界顶点点集使用delaunay三角剖分技术得到新的三角网,新的三角网通过三角形重心坐标筛选出航道边界内部的三角形;
87.所述航道内部的三角形包括单邻三角网、双邻三角网以及三邻三角网。
88.具体地,所述步骤s3采用:航道图的顶点由特定三角形的重心构成,航道图的边由其余三角形在私有边上的中位线构成;所述航道中心线为提取的航道图中的边;
89.所述特定三角形包括单邻三角网或三邻三角网;
90.航道图构建算法整体框架如算法1描述:
[0091][0092][0093]
航道图提取算法从任意单邻三角形开始,对航道三角网的顶点三角形进行深度优先遍历(算法1,行1-4);
[0094]
图顶点三角形遍历算法递归的遍历所有图顶点三角形,过程如算法2描述:
[0095][0096]
从单邻三角形共有边方向创建一条航道边(算法2,行4-5),边的初始线段是航道顶点到共有边中点的线段;
[0097]
对当前航道边进行递归的边顶点抽取,过程如算法3描述:
[0098][0099][0100]
根据遍历到的三角形类别进行不同的操作:若是边三角形(算法3,行4-7),则提取其私有边上的中位线,并添加至当前航道边中;若是顶点三角形(算法3,行1-3),则闭合当前航道边,并在其他共有边方向创建一条新的航道边;直到所有三角形遍历完成;
[0101]
所述边三角形是相邻三角形的数量为偶数的三角形;
[0102]
所述顶点三角形是相邻三角形数量为奇数的三角形。
[0103]
根据本发明提供的一种面向ais船舶轨迹大数据的航道边界和中心线挖掘系统,包括:
[0104]
模块m1:将ais船舶轨迹数据的航迹点进行delaunay三角网化,基于航迹点三角网中的三角形进行筛选得到航迹点的原始边界;
[0105]
模块m2:对获取的航迹点的原始边界进行平滑处理,基于平滑处理后航迹点原始
边界的顶点点集进一步进行delaunay三角网化,基于顶点点集三角网进行筛选得到航道轮廓;
[0106]
模块m3:基于航道轮廓构建航道图及航道的中心线。
[0107]
具体地,所述模块m1采用:
[0108]
模块m1.1:对原始ais船舶航迹大数据进行预处理,按照固定时间间隔对预处理后的ais船舶航迹大数据进行均匀采样;
[0109]
模块m1.2:将经纬度坐标转化为地理哈希值;
[0110]
模块m1.3:根据地理哈希值出现的频次分布利用最大化类间方差算法得到哈希值频次筛选阈值,保留出现频次高于筛选阈值的地理哈希值对应的坐标,起到抑制数据噪声的作用,并作为近似的航迹边界候选点,将近似的航迹边界候选点映射到笛卡尔平面坐标得到航迹点的平面点集;其中,所述最大化类间方差算法是灰度图像二值化处理中常用的方法,通过遍历二值化阈值,最大化目标区域与背景区域之间的方差的方法达到图像二值化的目的。本发明利用最大化类间方差最大化淘汰的地理哈希值和保留的地理哈希值的频次方差,达到地理哈希值筛选的目的。
[0111]
模块m1.4:使用delaunay三角剖分技术重构平面航迹点集的形状,并将得到的航迹点三角网中的三角形进行三角空洞指数筛选,在剩余的三角网中提取外部边界得到航迹点的原始边界。其中,所述delaunay三角剖分技术是一种将平面离散点集转换位三角网格数据的图形分析技术。delaunay三角剖分具有通过最大化最小角使三角网最接近规则化,以及任意四点不能共圆的唯一性两个特点。剖分算法通过在平面点集上构造凸包,并不断连接相邻凸包边组成的三角形构建三角网,直到没有可用边。
[0112]
具体地,所述对原始ais船舶航迹大数据进行预处理采用:原始ais船舶轨迹大数据利用地理哈希技术将船舶轨迹坐标网格化,得到网格化后的ais船舶轨迹大数据。其中,所述地理哈希技术是一个将二维坐标编码为字符串的过程。地理哈希技术通过不断使用二分法来缩小经度和纬度的区间来进行二进制编码,最后将经纬度分别产生的编码奇偶位交叉合并,最后将二进制串转化为base32字符串。
[0113]
具体地,所述模块m2采用:
[0114]
模块m2.1:对航迹点的原始边界进行平滑处理得到精化的航道多边形边界;
[0115]
模块m2.2:基于精化的航道多边形边界提取航道边界顶点点集,提取的航道边界顶点点集进一步提取delaunay三角网并剔除航道边界外部的三角形,得到航道轮廓。
[0116]
具体地,所述模块m2.1采用:使用毛刺边去除以及中值滤波技术对航迹点的原始边界进行平滑处理后得到精化的航道多边形边界。
[0117]
具体地,所述模块m2.2采用:提取的航道边界顶点点集使用delaunay三角剖分技术得到新的三角网,新的三角网通过三角形重心坐标筛选出航道边界内部的三角形;
[0118]
所述航道内部的三角形包括单邻三角网、双邻三角网以及三邻三角网。
[0119]
具体地,所述模块m3采用:航道图的顶点由特定三角形的重心构成,航道图的边由其余三角形在私有边上的中位线构成;所述航道中心线为提取的航道图中的边;
[0120]
所述特定三角形包括单邻三角网或三邻三角网;
[0121]
航道图构建算法整体框架如算法1描述:
[0122][0123][0124]
航道图提取算法从任意单邻三角形开始,对航道三角网的顶点三角形进行深度优先遍历(算法1,行1-4);
[0125]
图顶点三角形遍历算法递归的遍历所有图顶点三角形,过程如算法2描述:
[0126][0127]
从单邻三角形共有边方向创建一条航道边(算法2,行4-5),边的初始线段是航道顶点到共有边中点的线段;
[0128]
对当前航道边进行递归的边顶点抽取,过程如算法3描述:
[0129][0130][0131]
根据遍历到的三角形类别进行不同的操作:若是边三角形(算法3,行4-7),则提取其私有边上的中位线,并添加至当前航道边中;若是顶点三角形(算法3,行1-3),则闭合当前航道边,并在其他共有边方向创建一条新的航道边;直到所有三角形遍历完成;
[0132]
所述边三角形是相邻三角形的数量为偶数的三角形;
[0133]
所述顶点三角形是相邻三角形数量为奇数的三角形。
[0134]
实施例2
[0135]
实施例2是实施例1的优选例
[0136]
实施的整体流程请参阅图1。本实施例结合我国渤海海域,时间范围在2021年3月到2021年8月的ais轨迹大数据为例,介绍该海域航道边界和中心线挖掘实施流程:
[0137]
利用地理哈希技术,对ais原始航迹坐标进行网格化。合并轨迹地理哈希集合,统计各地理哈希出现的频次。
[0138]
利用最大化类间方差算法得到哈希值频次筛选阈值,保留出现频次相对高的哈希值对应的坐标作为近似的航迹边界候选点。基于最大化类间方差原则的筛选阈值选择结果。保留出现频次较高的网格化坐标。
[0139]
将保留的航迹经纬度坐标点映射至epsg 3857平面坐标系。使用delaunay三角剖分技术对平面点集进行三角网化,并计算网中各三角形的空洞指数。航迹点原始三角网示意图请参阅图3。如图2所示,三角空洞指数定义为三角形内切圆的半径。剔除三角网中空洞指数较高的三角形,本例中空洞指数选择2e3。筛选后的三角网请参阅图4。
[0140]
提取三角网边界,作为航道原始边界。并使用毛刺边和中值滤波等技术对原始边界进行平滑处理。航道边界平滑的效果如图5所示。
[0141]
对平滑后的航道边界点集使用delaunay三角剖分得到新的三角网,通过三角形重心坐标筛选出航道边界内部的三角形。对新三角网中的三角形进行分类,所属类别对应其邻近三角形的数量。并由此将三角形分为两类,相邻三角形数量为奇数的为顶点三角形,相邻三角形数量为偶数的为边三角形。本实施例中的分类结果请参阅图6。
[0142]
在三角网中提取航道图。航道图的顶点由顶点三角形的重心构成,航道图的边由边三角形在私有边上的中位线构成。航道图提取算法从任意单邻三角形开始,对航道三角网进行深度优先遍历,从单邻三角形共有边(有且仅有一条)方向创建一条航道边,边的初始线段是航道顶点到共有边中点的线段。根据遍历到的三角形类别进行不同的操作:若是边三角形,则提取其私有边(有且仅有一条)上的中位线,并添加至当前航道边中;若是顶点三角形,则闭合当前航道边,并在其他共有边方向创建一条新的航道边。直到所有三角形遍
历完成。本例中的航道图结果示意请参阅图7。
[0143]
提取的航道图中的边即为欲提取的航道中心线。渤海区域的航道边界以及中心线挖掘效果请参阅图8。
[0144]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
[0145]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1