点云地图修复方法、电子设备和存储介质与流程
本发明涉及点云地图,尤其涉及一种点云地图修复方法、电子设备和存储介质。
背景技术:
1、在自动驾驶领域,我们通常把l4或l4以上级别的自动驾驶视为计算机主导的自动驾驶方案。l4自动驾驶需要智能的感知、定位、决策、规划技术来实现高级别的自动驾驶功能,而这些模块都依赖高精地图提供的数据输入。一般认为,高精地图对于l4级别的自动驾驶是不可或缺的。
2、高精地图通常是在激光点云数据基础上生产的。高精地图采集车通过车辆携带的激光传感器,配合自身惯性导航、卫星导航等数据,构建目标道路的三维点云。然后,地图标注人员在点云或点云鸟瞰图中标注路面、路牙、路口、红绿灯等交通要素。
3、在整个生产过程中,如何正确、高效地构建大规模点云数据,是高精地图生产过程中不可避免的技术问题。由于现实当中很难找到真实世界对应的三维真值,高精地图的点云质量也难以得到有效的保证。因此对采集到的高精地图需要进行验证,并对出错地方进行修复。
4、现有的高精地图验证手段集中于事前的规范采集与事后的验证测试,但是如果验证阶段存在问题,仍然缺乏从后往前的反馈修正手段。这导致最终的点云地图一旦出现问题,整个生产流程必须从头再来,使得地图质量把控的流程变得异常繁琐。常见的现象包括,在某个地图的局部,由于卫星导航信号的抖动和不稳定现象,使得该处点云发生了畸变或交错,从而导致整张地图出现定位问题或信息错乱问题。当地图的面积越大、场景越复杂,该问题发生的概率就越高。尤其是l4乘用车使用的地图,可以轻易达到数百公里级别,容易在个别交叉口出现问题。而目前还难以通过自动化的算法来处理所有可能存在的地图问题,例如大场景地图可能存在的局部错位或重叠的问题目前无法解决。
技术实现思路
1、本发明实施例旨在至少解决上述技术问题之一。本发明实施例能够修复点云地图局部重影和错位等问题。
2、第一方面,本发明实施例提供一种点云地图修复方法,包括:关键帧修复步骤:响应于检查人员在可视化操作界面中对关键帧进行位姿调整,更新所述关键帧的位姿得到修复关键帧,其中,所述可视化操作界面中加载有待修复的点云地图,所述可视化操作界面能够允许检查人员对任一关键帧的数据进行修改;回环检测优化步骤:响应于所述检查人员在所述可视化操作界面中选择标记回环指令和优化指令,将所述修复关键帧和所述修复关键帧的位姿作为人工回环,并在所述修复关键帧的预设范围区域启动回环检测和优化。
3、第二方面,本发明实施例提供一种电子设备,其包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器,其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明上述任一项点云地图修复方法。
4、第三方面,本发明实施例提供一种存储介质,所述存储介质中存储有一个或多个包括执行指令的程序,所述执行指令能够被电子设备(包括但不限于计算机,服务器,或者网络设备等)读取并执行,以用于执行本发明上述任一项点云地图修复方法。
5、第四方面,本发明实施例还提供一种计算机程序产品,所述计算机程序产品包括存储在存储介质上的计算机程序,所述计算机程序包括程序指令,当所述程序指令被计算机执行时,使所述计算机执行上述任一项点云地图修复方法。
6、本发明实施例通过确定点云地图中的待修复关键帧,对待修复关键帧施加较强的回环约束,或对选定的两个待修复关键帧附近的区域,执行小范围的回环检测,之后去掉该区域其他因子的影响并执行全图的因子图优化,从而可以实现对点云地图局部重影和错位等问题的修复,保证了点云地图的质量。
技术特征:
1.一种点云地图修复方法,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据每一帧的当前状态,确定出地图中的修复关键帧包括:
3.根据权利要求2所述的方法,其特征在于,对所述待修复关键帧进行优化操作,得到修复后的地图包括:
4.根据权利要求1所述的方法,其特征在于,所述根据每一帧的当前状态,确定出地图中的修复关键帧包括:
5.根据权利要求4所述的方法,其特征在于,对所述待修复关键帧进行优化操作,得到修复后的点云地图包括:
6.根据权利要求5所述的方法,其中,所述点云地图优化采用因子图优化,所述在所述待修复关键帧的预设范围内启动回环检测优化包括:
7.一种点云地图修复设备,包括:
8.一种电子设备,其包括:至少一个处理器,以及与所述至少一个处理器通信连接的存储器,其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-6中任意一项所述方法的步骤。
9.一种存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1-6中任一项所述方法的步骤。
10.一种计算机程序产品,所述计算机程序产品包括存储在非易失性计算机可读存储介质上的计算机程序,所述计算机程序包括程序指令,当所述程序指令被计算机执行时,使所述计算机执行权利要求1至6中任一项所述方法的步骤。
技术总结
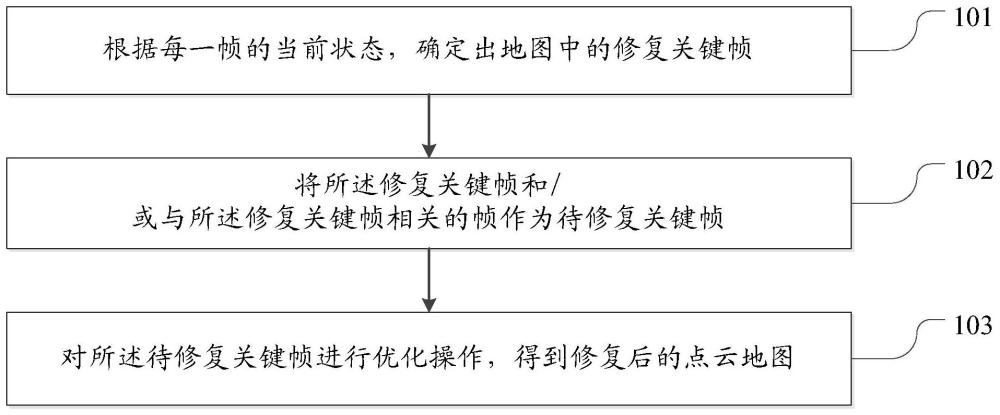
本发明公开一种点云地图修复方法、电子设备和存储介质,其中方法包括:根据每一帧的当前状态,确定出地图中的修复关键帧;将所述修复关键帧和/或与所述修复关键帧相关的帧作为待修复关键帧;对所述待修复关键帧进行优化操作,得到修复后的点云地图。本发明实施例通过根据每一帧的当前状态,确定出地图中的修复关键帧,之后对修复关键帧进行优化操作,从而可以实现对点云地图局部重影和错位等问题的修复,保证了点云地图的质量。
技术研发人员:高翔,张放
受保护的技术使用者:北京智行者科技股份有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!