一种交叉口车辆二维轨迹重构方法
1.本发明属于轨迹重构方法技术领域,尤其涉及一种交叉口车辆二维轨迹重构方法。
背景技术:
2.车辆轨迹数据是道路交通设计、优化、控制和管理各阶段工作的基础数据。对于交叉口,可通过gps、车载雷达、无人机视频等设备记录车辆的轨迹。然而获取的轨迹通常由于观测误差而含有噪声,造成轨迹的运动参数不符合车辆动力学规律,因此需要在使用轨迹数据前需要进行轨迹重构。以往研究大多致力于重构干道的车辆轨迹,主要考虑车辆轨迹的纵向误差。然而在交叉口内部,车辆轨迹除了受到纵向误差外,还由于转向而受到横向的影响,因此有必要开发针对交叉口车辆二维轨迹的重构方法。
3.交叉口车辆二维轨迹同时受到速度和方向的影响,直接使用一维干道车辆轨迹重构技术进行重构可能会导致方向上的不连续,未见有针对性的应对方法,并且也未检索到这类方法的发明专利。
4.经对现有技术的文献检索发现,车辆轨迹重构方法主要有以下几种:
5.1、基于滤波的车辆轨迹重构。在车辆轨迹重构中,主要通过对车辆坐标、速度应用滤波进行平滑以获得符合动力学的车辆轨迹数据。其中最为常用的是移动平均滤波、savitzky-golay滤波、butterworth滤波、多项式回归滤波、kalman滤波。代表性成果与论著包括《车辆轨迹预测方法及装置》(专利申请号cn202111553146.5)、《kalman filtering techniques for radar tracking》。
6.2、基于平滑的车辆轨迹重构。对于获取的轨迹数据,可通过应用平滑技术对车辆轨迹数据进行重构以消除轨迹中的噪声。其中最为常用的是样条平滑、指数平滑、rauch-tung-strieber平滑。代表性成果包括《一种基于滑动平均算法的车辆轨迹优化方法》(专利申请号cn202011207444.4)、《一种轨迹数据的处理方法以及相关装置》(专利申请号cn202011373472.3)。
7.方法1是传统的针对干道的车辆轨迹数据重构,不涉及本发明针对的二维平面内的车辆轨迹重构。
8.方法2在对车辆轨迹进行重构时普遍采用了固定的平滑参数,然而,对于处于交叉口的车辆会存在明显的误差,重构的横向轨迹往往由于不适用于纵向误差模式而出现较大误差。
9.现有车辆轨迹重构有着丰富的手段和方法,然而,在利用各种手段消除轨迹中的噪声时,未针对交叉口车辆二维轨迹同时受到速度和方向影响这一特征提出相应的处理方法。这导致重构的轨迹存在误差。因此,现有技术缺乏针对交叉口车辆二维轨迹的重构方法。
技术实现要素:
10.本发明考虑交叉口车辆二维轨迹同时受到速度和方向影响这一特征,提供了一种交叉口车辆二维轨迹重构方法,使得重构轨迹的运动参数能尽可能符合车辆动力学规律。
11.本发明的技术方案如下:
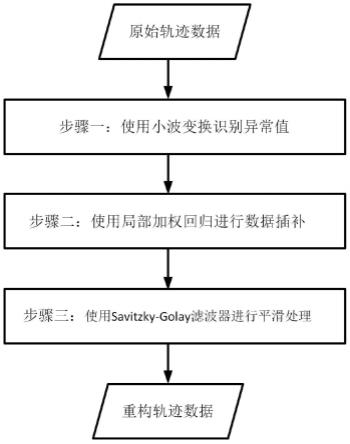
12.参考图1,通过依次实施通过异常识别-线性插值-局部平滑3个步骤,对车辆轨迹进行重构。
13.步骤1:使用小波变换识别异常值。通过轨迹数据计算车辆的速度和方向曲线,确定合适的小波基识别速度和方向中的异常值。将能量香农熵比和加速度范围作为速度异常识别小波基选择的依据;将能量香农熵比和曲率范围作为方向角异常识别小波基选择的依据;将车辆加速度的合理范围设定为[-5,5]m/s2,曲率的合理范围设定为[-0.2,0.2]m-1。在满足加速度或曲率合理范围的基础上,选取能量香农熵比最大的小波基。
[0014]
能量香农熵比可由式(1)计算得到。
[0015][0016]
式中,radio(j)表示j级分解时能量与香农熵的比率;e(j)表示j级分解的能量,由式(2)确定。
[0017][0018]
式中,wt(j,k)表示k级的小波系数;k是小波系数的总数。s
entropy
(j)表示j级分解处的香农熵,由式(3)确定。
[0019][0020]
式中,pk表示小波系数的能量分布,定义为
[0021]
为了确定具有高度集中信号能量的小波系数的确切位置,将细节分量的小波系数与阈值进行比较。根据等式(4)定义。
[0022][0023]
式中,μj和σj分别是j级小波系数的均值和标准差;z值在95%置信水平下为1.96。
[0024]
步骤2:使用局部加权回归进行数据插值。通过小波变换识别异常值后,需要对去除异常值后的轨迹数据缺失值进行插值,以便于后续的滤波和平滑。局部加权回归的一般形式在等式(5)中定义。
[0025][0026]
式中,k是最近邻的数量;ψ是权重向量;ψi是分配给每个最近的实例的权重,可以从核函数k(xi,x0)获得;d是多项式的次数;xi是第i个轨迹点的速度或方向角;x0是要拟合的速度或方向角。在训练期间,使用式(6)重新更新了训练示例的权重(ψ
*
)。
[0027][0028]
式中为平方损失函数;yi是第i个轨迹点的方
向角或速度值的实际输出;k(xi,x0)是内核函数。高斯核的基本形式由等式(7)给出。
[0029][0030]
式中,σ和h是高斯核的超参数;w是权重矩阵。w(i,i)的值表示拟合预测第i个速度或方向角的权重。
[0031]
步骤3:使用savitzky-golay滤波器进行平滑处理。s-g滤波如公式(8)所示。
[0032][0033]
式中,yj是速度或方向角度拟合值;y
j+1
是原始速度或方向角度值;ci是滤波器的第i个系数,本方法通过2阶多项式最小二乘拟合得到;m是半波窗口宽度,本方法中取0.3,n是波器的长度,等于2m+1。
[0034]
交叉口内部重构车辆轨迹的关键在于准确识别速度和方向异常值。现有技术的缺陷就在于只考虑纵向上的轨迹误差。本发明的上述过程中充分考虑了二维平面内实际车辆轨迹不仅受速度的影响还受到转向的影响,对不同程度噪声分别采用小波变换和savitzky-golay滤波进行剔除和平滑,并针对每条轨迹的速度和方向,结合曲线整体特征和物理含义选择重构参数,保障了重构轨迹的运动参数能尽可能符合车辆动力学规律,提高了车辆二维轨迹数据重构的准确性。
[0035]
与现有技术相比,本发明的有益效果主要体现在:
[0036]
1、本发明提供了一种交叉口车辆二维轨迹重构方法,可适用于交叉口区域内的车辆轨迹数据重构。
[0037]
2、本发明建立了异常识别-线性插值-局部平滑3步轨迹重构方法,对不同程度噪声分别采用小波变换和savitzky-golay滤波进行剔除和平滑。
[0038]
3、本发明考虑了二维平面内车辆轨迹同时受速度和方向影响的特征,针对每条轨迹的速度和方向,结合曲线整体特征和物理含义选择重构参数,保障了重构轨迹的运动参数能尽可能符合车辆动力学规律。
附图说明
[0039]
图1为本发明的流程图;
[0040]
图2为本发明实施例1中道路几何条件示意图;
[0041]
图3为本发明实施例1中步骤1结果;
[0042]
图4为本发明实施例1中步骤2结果;
[0043]
图5为本发明实施例1中步骤3结果;
[0044]
图6为本发明实施例1中本发明与ma、sg方法的加速度对比图;
[0045]
图7为本发明实施例1中本发明与ma、sg方法的曲率对比图。
具体实施方式
[0046]
下面将结合示意图对本发明一种交叉口车辆二维轨迹重构方法进行更详细的描述,其中表示了本发明的优选实施例,应该理解本领域技术人员可以修改在此描述的本发明,而仍然实现本发明的有利效果,因此,下列描述应当被理解为对于本领域技术人员的广
泛知道,而并不作为对本发明的限制。
[0047]
实施例1:
[0048]
采用视频识别技术提取原始轨迹数据。采用本发明方法如图2所示交叉口内采集到的车辆轨迹(以1105号车为例)进行重构,具体过程简述如下:
[0049]
步骤1:使用小波变换识别异常值。在考虑的haar,daubechies(db),symlets(sym),coiflets(coif)和biorthogonal(bior)小波中,速度和方向角小波选取结果如表1、表2所示。识别出的异常点如图3所示。
[0050]
小波能量香农熵比加速度范围(米/秒2)haar13.69[-4.87,3.87]db212.72[-5.13,4.11]db411.74[-11.02,36.98]db611.19[-51.02,68.22]sym212.71[-6.52,6.45]sym412.64[-7.63,7.95]sym612.46[-7.56,8.34]coif112.33[-7.33,10.91]coif312.02[-8.21,11.96]coif512.00[-14.30,20.96]bior1.311.86[-50.22,124.68]bior2.811.43[-33.09,50.53]bior3.111.64[-25.21,28.28]
[0051]
表1
[0052]
小波能量香农熵比曲率范围(米-1)haar364.17[-1.07,1.08]db2333.90[-0.99,1.60]db4354.31[-0.11,0.58]db6430.14[-0.08,0.21]sym2333.90[-0.99,1.60]sym4365.77[-0.09,0.56]sym6359.20[-0.08,0.51]coif1360.86[-0.24,0.66]coif3483.76[-0.08,0.23]coif5441.12[-0.17,0.33]bior1.3343.98[-1.06,9.51]bior2.8535.66[-0.07,0.19]bior3.1474.94[-0.88,1.44]
[0053]
表2
[0054]
步骤2:使用局部加权回归进行数据插值。对异常值附近的10个点进行局部拟合进行插值的结果如图4所示。
[0055]
步骤3:使用savitzky-golay滤波器进行平滑处理。对插值后的速度和方向角曲线应用savitzky-golay滤波进行平滑结果如图5所示。
[0056]
本发明计算结果、应用ma、s-g结果的加速度、曲率分布如图6、图7所示。较ma、s-g方法,加速度异常率分别提升了11%和5%,曲率异常率分别提升6%和13%。同时对重构轨迹与人工提取的地面真实轨迹进行配对样本t检验结果如表3所示,表明示例车辆的重构轨迹与原始轨迹的坐标无显著差异。示例车辆应用本发明方法与应用ma、s-g方法的重构轨迹与地面真实轨迹的差值对比结果见表4,本发明对重构轨迹的误差均小于1m。
[0057][0058]
表3
[0059]
方法最大(米)最小值(米)平均值(米)标准偏差(米)本发明的方法0.9210.1270.8211.257ma方法2.1321.1531.7752.396s-g方法2.0551.2411.8262.878
[0060]
表4
[0061]
上述仅为本发明的优选实施例而已,并不对本发明起到任何限制作用。任何所属技术领域的技术人员,在不脱离本发明的技术方案的范围内,对本发明揭露的技术方案和技术内容做任何形式的等同替换或修改等变动,均属未脱离本发明的技术方案的内容,仍属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1