车载式残膜回收监测系统及其应用方法
本发明涉及残膜回收效率监测与残膜作业面积监测,属于智慧农业装备领域,尤其是一种车载式残膜回收监测系统及其应用方法。
背景技术:
1、目前残膜回收监测主要靠人工采样,分别将测点耕作层内的残留地膜捡出,用清水洗净,放置阴凉处晾干,然后用天平称重计算地膜残留量。这种方法费时费力,还达不到实时监测的效果。
2、当前还没有一种成熟的可供使用的车载式残膜监测系统及应用方法,相对于目前现有的其他检测方法,可实现图像分辨率高、劳动强度低、评估周期短、作业简便、随时可查数据的目的,进而实现为残膜回收规范化管理,补贴的合理精准发放,提高农民回收残膜的积极性。
技术实现思路
1、本发明的目的是提供一种安装于残膜回收机的车载式残膜回收监测系统,安装简便,方便快捷、经济实用,能够为监测残膜回收机的回收效率、作业轨迹、作业面积和作业速度提供硬件基础。
2、本发明的另一目的是提供车载式残膜回收监测系统的应用方法,能够快速准确的对残膜回收机的回收效率、作业轨迹、作业面积和作业速度进行监测,具有经济实用,图像分辨率高、劳动强度低、评估周期短、作业简便、随时可查数据的特点。
3、为了实现上述目的,本申请提供了以下技术方案:
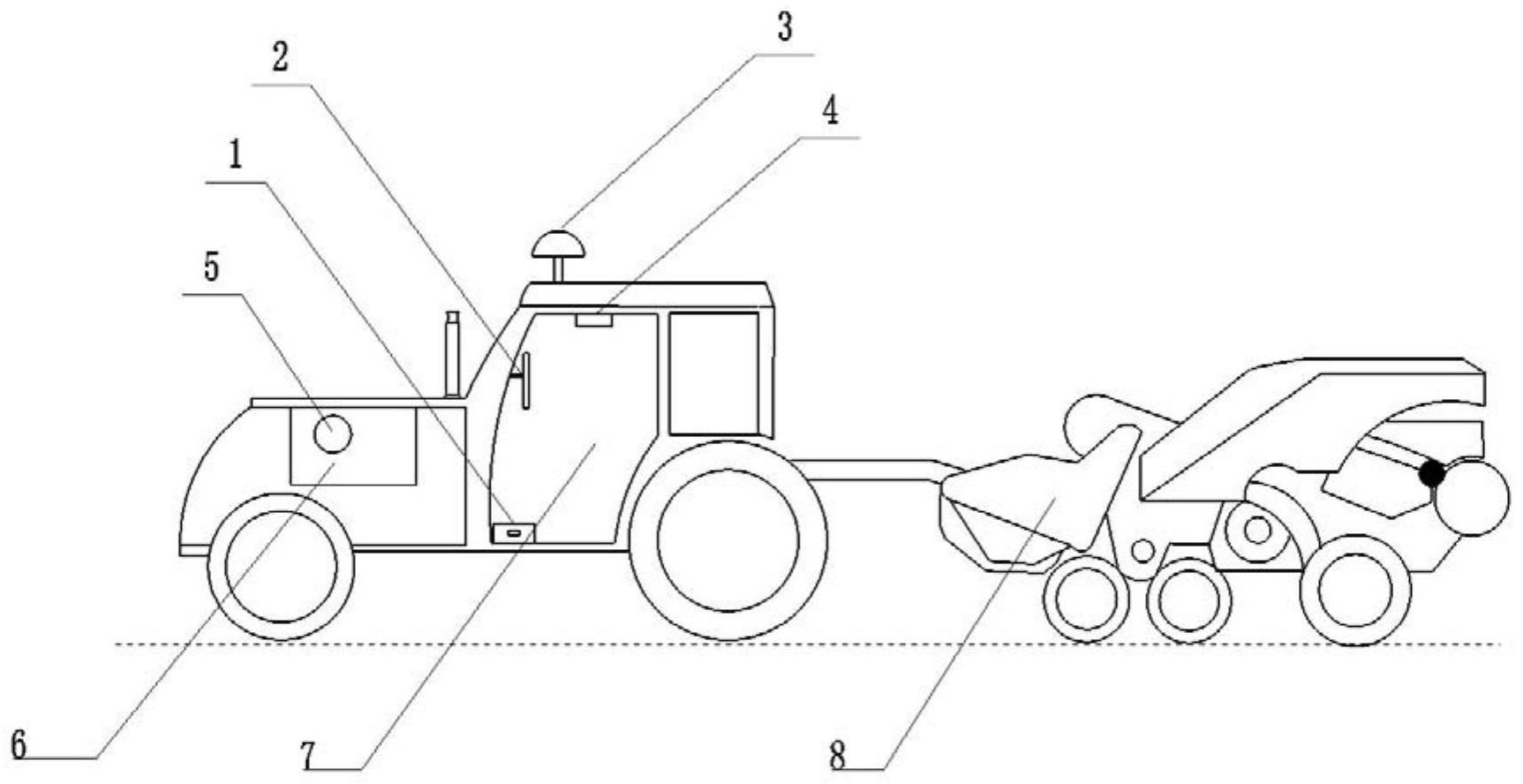
4、本发明提供的车载式残膜回收监测系统,包括由机车牵引的残膜回收机,其特征在于残膜回收机上安装有:运动相机、北斗定位装置、工控机、4gdtu模块、曲轴位置传感器;
5、所述运动相机设有两个,安装在机车驾驶室的左右两侧;所述北斗定位装置安装在机车驾驶室上方;所述工控机安装在机车驾驶室内;所述4gdtu模块安装在工控机上通过无线传输的方式进行数据传输;所述曲轴位置传感器安装在机车发动机的曲轴上用于监测发动机转速。
6、本发明还包括残膜回收信息监测云平台,用于记录回残膜前后农田的图像,作业时经纬度、作业轨迹和核算后的作业面积、残膜回收机的车速,供随时查验。
7、作为优选,所述工控机中安装有残膜回收率监测系统、作业面积监测系统、车速监测系统,其中:所述残膜回收率监测系统用于监测残膜污染情况以及回收率的监测;所述作业面积监测系统用于残膜回收机作业轨迹的监测与作业面积的计算;所述车速监测系统是用于监测残膜回收机发动机转速和行进速度。
8、一种车载式残膜回收监测系统的应用方法,所述工控机中安装有残膜回收率监测系统,通过运动相机拍摄的残膜回收前与回收后的图像判断残膜回收率,主要包括以下步骤:(1)在残膜回收机启动后,接收通过运动像机拍摄回收前、回收后的田间残膜图像,残膜回收机在行驶中保持平稳速度,按照规划线路依次采集农田图像;(2)通过数字图像处理手段对照片进行畸变较正,通过检查图片中每个像素,选择重复的特征像素进行提取,并匹配完成对多张图像的拼接,得到农田的全景图;(3)通过机器学习训练好的残膜回收率模型,以全景图作为输入,通过阈值分割的方法识别回收前后图中残膜的像素点,通过回收前后图中残膜像素占比的差值得到残膜回收率。
9、除了安装有上述残膜回收率监测系统之外,所述工控机中还安装有作业面积监测系统,通过北斗定位装置的定位信息,完成残膜回收机的作业轨迹的监测和作业面积的计算,主要包括以下步骤:(1)通过北斗定位装置接收经纬度坐标信息;(2)剔除环境和系统造成的定位误差数据,以提升单点精度;(3)利用高斯投影将经纬度信息转换为平面坐标系坐标,将相邻坐标点连线得到作业轨迹;(4)借助编程算法,利用上述平面坐标系的坐标计算轨迹长度,将残膜回收机的作业宽度乘以轨迹的长度,得到粗略作业面积;(5)选取作业轨迹上连续的三个坐标点,以中间坐标点为顶点,向两侧相邻坐标点连线,以所构成角的角度为对象,使用编程算法,当角度小于170°时,判断残膜回收机在地头拐弯调头的轨迹为无效作业轨迹,将残膜回收机的作业宽度乘以轨迹的长度得到无效作业面积;(6)使用网格法对交叉重合的地块进行筛选,得出交叉重合作业面积;(7)最后将粗略作业面积,减去无效面积及交叉重合作业面积,得到精确作业面积。
10、除了安装有上述残膜回收率监测系统、作业面积监测系统之外,所述工控机中还安装有车速监测系统,用于监测残膜回收机发动机转速和行进速度,主要包括以下步骤:(1)利用所述曲轴位置传感器监测机车发动机转速信息,传至驾驶室工控机进行分析处理,获得实时的发动机转速信息;(2)行进速度可以通过工控机分析处理发动机转速得到,行进速度(km/小时)=发动机转速×60×3.14×轮胎直径/(1000×主减速比×对应档位传动比),利用曲轴位置传感器监测到的发动机转速信息,进行以上数据分析处理,得到行进速度。
11、本发明提供的安装于残膜回收机的车载式残膜回收监测系统,安装简便,方便快捷、结构简单、经济实用,能够为监测残膜回收机的回收效率、作业轨迹、作业面积和作业速度提供硬件基础。
12、本申请所述的车载式残膜回收监测系统的应用方法,通过拍摄残膜回收前后的影像,并使用机器学习的方法,实现了残膜污染与回收率的监测;通过采集作业过程中的经纬度数据,对数据进行预处理,使用高斯投影将其转化为平面坐标,实现了对作业轨迹和作业面积的监测;通过接收安装在发动机上的传感器数据,实现了对残膜回收机发动机转速和行进速度的监测,整体系统操作方便,功能多样,方便快捷。
技术特征:
1.一种车载式残膜回收监测系统,包括由机车牵引的残膜回收机,其特征在于残膜回收机上安装有:运动相机、北斗定位装置、工控机、4gdtu模块、曲轴位置传感器;
2.如上述权利要求1所述的车载式残膜回收监测系统,还包括残膜回收信息监测云平台,用于记录回残膜前后农田的图像,作业时经纬度、作业轨迹和核算后的作业面积、残膜回收机的车速,供随时查验。
3.如上述权利要求2所述的车载式残膜回收监测系统,其特征在于所述工控机中安装有残膜回收率监测系统、作业面积监测系统、车速监测系统,其中:所述残膜回收率监测系统用于监测残膜污染情况以及回收率的监测;所述作业面积监测系统用于残膜回收机作业轨迹的监测与作业面积的计算;所述车速监测系统是用于监测残膜回收机发动机转速和行进速度。
4.如上述权利要求2所述的车载式残膜回收监测系统的应用方法,其特征在于,所述工控机中安装有残膜回收率监测系统,通过运动相机拍摄的残膜回收前与回收后的图像判断残膜回收率,主要包括以下步骤:(1)在残膜回收机启动后,接收通过运动像机拍摄回收前、回收后的田间残膜图像,残膜回收机在行驶中保持平稳速度,按照规划线路依次采集农田图像;(2)通过数字图像处理手段对照片进行畸变较正,通过检查图片中每个像素,选择重复的特征像素进行提取,并匹配完成对多张图像的拼接,得到农田的全景图;(3)通过机器学习训练好的残膜回收率模型,以全景图作为输入,通过阈值分割的方法识别回收前后图中残膜的像素点,通过回收前后图中残膜像素占比的差值得到残膜回收率。
5.如上述权利要求4所述的车载式残膜回收监测系统的应用方法,其特征在于,所述工控机中安装有作业面积监测系统,通过北斗定位装置的定位信息,完成残膜回收机的作业轨迹的监测和作业面积的计算,主要包括以下步骤:(1)通过北斗定位装置接收经纬度坐标信息;(2)剔除环境和系统造成的定位误差数据,以提升单点精度;(3)利用高斯投影将经纬度信息转换为平面坐标系坐标,将相邻坐标点连线得到作业轨迹;(4)借助编程算法,利用上述平面坐标系的坐标计算轨迹长度,将残膜回收机的作业宽度乘以轨迹的长度,得到粗略作业面积;(5)选取作业轨迹上连续的三个坐标点,以中间坐标点为顶点,向两侧相邻坐标点连线,以所构成角的角度为对象,使用编程算法,当角度小于170°时,判断残膜回收机在地头拐弯调头的轨迹为无效作业轨迹,将残膜回收机的作业宽度乘以轨迹的长度得到无效作业面积;(6)使用网格法对交叉重合的地块进行筛选,得出交叉重合作业面积;(7)最后将粗略作业面积,减去无效面积及交叉重合作业面积,得到精确作业面积。
6.如上述权利要求5所述的车载式残膜回收监测系统的应用方法,其特征在于,所述工控机中安装有车速监测系统,用于监测残膜回收机发动机转速和行进速度,主要包括以下步骤:(1)利用所述曲轴位置传感器监测机车发动机转速信息,传至驾驶室工控机进行分析处理,获得实时的发动机转速信息;(2)行进速度可以通过工控机分析处理发动机转速得到,行进速度(km/小时)=发动机转速×60×3.14×轮胎直径/(1000×主减速比×对应档位传动比),利用曲轴位置传感器监测到的发动机转速信息,进行以上数据分析处理,得到行进速度。
技术总结
本发明涉及残膜回收效率监测与残膜作业面积监测,属于智慧农业装备领域。一种车载式残膜回收监测系统,包括由机车牵引的残膜回收机,残膜回收机上安装有:运动相机、北斗定位装置、工控机、4GDTU模块、曲轴位置传感器;一种车载式残膜回收监测系统的应用方法,通过所述工控机中安装的残膜回收率监测系统、作业面积监测系统、车速监测系统,通过运动相机拍摄的残膜回收前与回收后的图像判断残膜回收率,通过北斗定位装置的定位信息,完成残膜回收机的作业轨迹的监测和作业面积的计算。本发明的监测系统及应用方法,安装简便,方便快捷、经济实用,具有经济实用,图像分辨率高、劳动强度低、评估周期短、作业简便、随时可查数据的特点。
技术研发人员:张若宇,王德阳,孟庆建,翟志强,邱发松,蔡凤杰,杨健康,汪旭
受保护的技术使用者:石河子大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!