工件的轮廓度测量方法、装置、设备、系统及介质与流程
本申请涉及工件测量,尤其涉及一种工件的轮廓度测量方法、设备以及存储介质。
背景技术:
1、在工件的生产中,为了保证工件的质量,防止工件的畸变。需要对三维形貌进行测量,轮廓度是衡量工件畸变大小的重要指标。轮廓度是指被测实际轮廓相对于理想轮廓的变动情况,通常用于描述曲面或曲线形状的准确度。轮廓度公差是用于定义轮廓度限制实际曲面(线)对理想曲面(线)变动量的一项指标。轮廓度公差是实际被测要素(轮廓要素)对理想轮廓的允许变动。
2、现有的轮廓度测量方式通常是将待测工件模型与其对应的3d设计模型进行比较,确定待测工件的轮廓度。然而,由于保密原则,在一些情况下,工件的3d设计模型的信息无法完整的获得,轮廓度的计算成为了一个棘手的问题。
技术实现思路
1、为解决上述存在的技术问题,本申请提供一种在无3d设计模型的情况下可实现快速测量的工件的轮廓度测量方法、设备以及存储介质。
2、依据本申请实施例的一方面,提供了一种工件的轮廓度测量方法,包括:
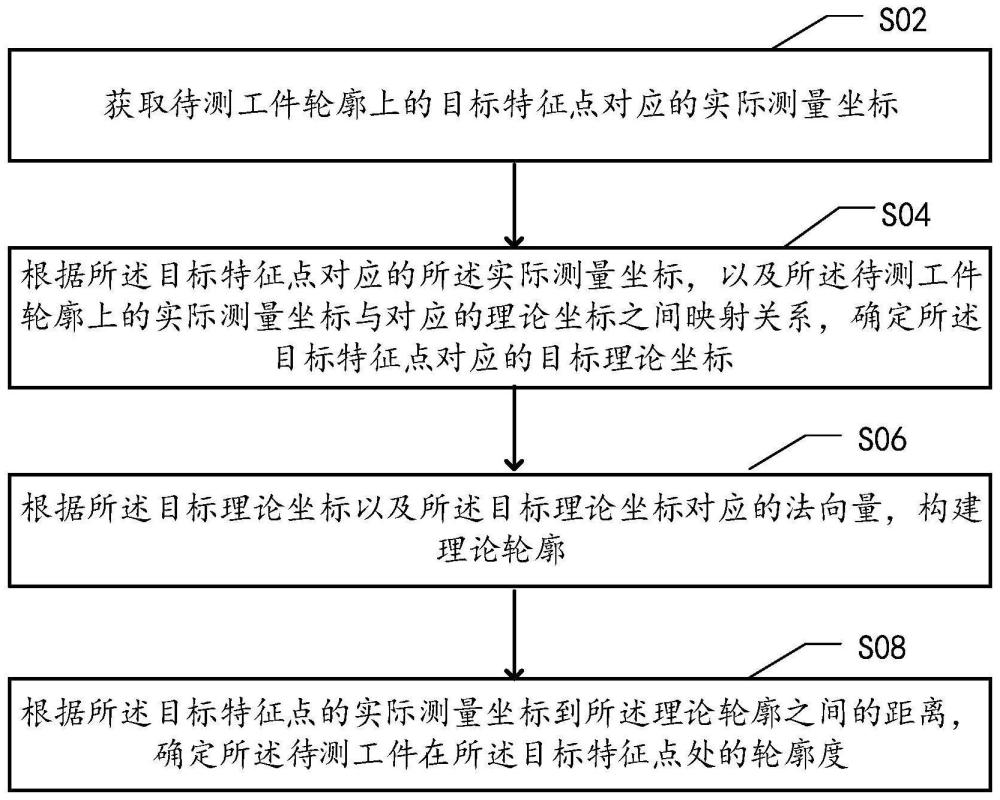
3、获取待测工件轮廓上的目标特征点对应的实际测量坐标;
4、根据所述目标特征点对应的所述实际测量坐标,以及所述待测工件轮廓上的实际测量坐标与对应的理论坐标之间映射关系,确定所述目标特征点对应的目标理论坐标;
5、根据所述目标理论坐标以及所述目标理论坐标对应的法向量,构建理论轮廓;
6、根据所述目标特征点的实际测量坐标到所述理论轮廓之间的距离,确定所述待测工件在所述目标特征点处的轮廓度。
7、依据本申请实施例的第二方面,提供了一种工件的轮廓度测量装置,包括获取模块,用于获取待测工件轮廓上的目标特征点对应的实际测量坐标;
8、第一确定模块,用于根据所述目标特征点对应的所述实际测量坐标,以及所述待测工件轮廓上的实际测量坐标与对应的理论坐标之间映射关系,确定所述目标特征点对应的目标理论坐标;
9、构建模块,用于根据所述目标理论坐标以及所述目标理论坐标对应的法向量,构建理论轮廓;
10、第二确定模块,用于根据所述目标特征点的实际测量坐标到所述理论轮廓之间的距离,确定所述待测工件在所述目标特征点处的轮廓度。
11、依据本申请实施例的第三方面,提供了一种工件的轮廓度测量设备,包括存储器和处理器;
12、所述处理器在运行所述存储器中存储的计算机程序指令时,执行所述的轮廓度测量方法的步骤。
13、依据本申请实施例的第四方面,提供了一种工件的轮廓度测量系统,包括特征点采集设备、所述的轮渡测量设备以及显示设备;
14、所述特征点采集设备用于采集待测工件轮廓上的目标特征点对应的实际测量坐标,并发送给所述轮廓度测量设备,所述轮廓度测量设备将所述待测工件轮廓上的所述目标特征点对应的轮廓度发送至所述显示设备,所述显示设备显示所述待测工件轮廓上的所述目标特征点对应的轮廓度;
15、所述特征点采集设备包括三维探测传感器、共聚焦系统或相机。
16、依据本申请实施例的第五方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程指令;
17、所述计算机程序指令被处理器执行时,实现所述的轮廓度测量方法的步骤。
18、由上可见,本申请提供的工件的轮廓度测量方法,通过获取待测工件轮廓上的目标特征点的实际测量坐标,并根据所述待测工件轮廓上的特征点实际测量坐标与对应的理论坐标之间的映射关系,确定所述待测工件轮廓上的所述目标特征点对应的目标理论坐标,并在相同坐标系下,根据所述目标特征点的对应的目标理论坐标以及所述目标理论坐标对应的法向量构建理论轮廓,再通过确定所述待测工件轮廓上的所述目标特征点的实际测量坐标到所述理论轮廓之间的距离,确定所述待测工件轮廓上的所述目标特征点对应的轮廓度。所述轮廓度测量方法,可在无3d设计模型下,实现待测工件的轮廓度的快速测量。
技术特征:
1.一种工件的轮廓度测量方法,其特征在于,包括:
2.根据权利要求1所述的轮廓度测量方法,其特征在于,所述根据所述目标特征点对应的所述实际测量坐标,以及所述待测工件轮廓上的实际测量坐标与对应的理论坐标之间映射关系,确定所述目标特征点对应的目标理论坐标,包括:
3.根据权利要求2所述的轮廓度测量方法,其特征在于,所述根据所述待测工件轮廓的实际测量坐标与对应的理论坐标之间的映射关系,将所述待测工件的所述目标特征点对应的所述实际测量坐标、所述待测工件轮廓上的特征点对应的理论坐标映射至相同坐标系中,包括:
4.根据权利要求3所述的轮廓度测量方法,其特征在于,所述根据所述待测工件轮廓的实际测量坐标与对应的理论坐标之间的映射关系,将所述待测工件的所述目标特征点对应的所述实际测量坐标、所述待测工件轮廓上的特征点对应的理论坐标映射至相同坐标系中,包括:
5.根据权利要求2所述的轮廓度测量方法,其特征在于,所述根据所述目标理论坐标以及所述目标理论坐标对应的法向量,构建理论轮廓,包括:
6.根据权利要求5所述的轮廓度测量方法,其特征在于,所述根据所述目标理论坐标以及所述目标理论坐标对应的法向量,构建理论轮廓,包括:
7.根据权利要求6所述的轮廓度测量方法,其特征在于,所述获取待测工件轮廓上的目标特征点对应的实际测量坐标,包括:
8.根据权利要求5所述的轮廓度测量方法,其特征在于,所述根据所述目标理论坐标以及所述目标理论坐标对应的法向量,构建理论轮廓,包括:
9.根据权利要求8所述的轮廓度测量方法,其特征在于,所述获取待测工件轮廓上的目标特征点对应的实际测量坐标,包括:
10.根据权利要求9所述的轮廓度测量方法,其特征在于,所述基于所述工件图像数据获取所述待测工件轮廓上的多个目标特征点的实际测量坐标,包括:
11.根据权利要求1所述的轮廓度测量方法,其特征在于,在所述根据所述目标特征点对应的所述实际测量坐标,以及所述待测工件轮廓上的实际测量坐标与对应的理论坐标之间映射关系,确定所述目标特征点对应的目标理论坐标之前,所述方法还包括:
12.根据权利要求11所述的轮廓度测量方法,其特征在于,所述根据所述待测工件轮廓上至少三个不共线的特征点对应的实际测量坐标,以及所述待测工件轮廓上的至少三个不共线的特征点对应的理论坐标,以确定待测工件轮廓上的实际测量坐标与对应的理论坐标之间的映射关系,包括:
13.根据权利要求1所述的轮廓度测量方法,其特征在于,所述方法还包括:
14.一种工件的轮廓度测量装置,其特征在于,包括:
15.一种工件的轮廓度测量设备,其特征在于,包括存储器和处理器;
16.一种工件的轮廓度测量系统,其特征在于,包括特征点采集设备、如权利要求15所述的轮廓度测量设备以及显示设备;
17.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程指令;
技术总结
本申请提供了一种工件的轮廓度测量方法、装置、设备、系统及介质,通过获取待测工件轮廓上的目标特征点的实际测量坐标,并根据所述待测工件轮廓上的特征点实际测量坐标与对应的理论坐标之间的映射关系,确定所述待测工件轮廓上的所述目标特征点对应的目标理论坐标,并在相同坐标系下,根据所述目标特征点的对应的目标理论坐标以及所述目标理论坐标对应的法向量构建理论轮廓,再通过确定所述待测工件轮廓上的所述目标特征点的实际测量坐标到所述理论轮廓之间的距离,确定所述待测工件轮廓上的所述目标特征点对应的轮廓度。所述轮廓度测量方法,可在无3D设计模型下,实现待测工件的轮廓度的快速测量。
技术研发人员:陈鲁,刘欢敏,吕肃,张嵩
受保护的技术使用者:深圳中科飞测科技股份有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!