一种双棱镜单目立体视觉系统三维光路分析方法与流程
1.本发明属于油气装备检测技术领域,尤其涉及一种双棱镜单目立体视觉系统三维光路分析方法。
背景技术:
2.水下油气装备主要用于采集、输送水下石油和天然气等燃料,具体包括有油气管道、防喷器、接头螺纹等装置。然而受外力破坏、侵蚀等因素的影响,水下油气装备可能发生变形、磨损甚至断裂,致使油气泄漏。因此,技术人员需对水下油气装备进行检测。
3.进一步研究后发现,现阶段可利用的油气装备视觉(分析)检测方法主要可归纳为以下几种:(1)、基于多个相机组成的多目视觉检测系统。该检测系统测量成本较高、同步性较差,且具有占据空间大的局限。
4.(2)、由反射镜和单个相机搭建的单目立体视觉检测系统。与上述多目视觉检测系统的局限相类似,该单目立体视觉检测系统具备占据空间大、结构复杂的劣势。
5.(3)、由双棱镜和相机组成的双棱镜单目立体视觉系统。该双棱镜单目立体视觉系统利用到了双棱镜对光线的折射作用,使相机的成像靶面可以同时采集到同一物体不同角度的两个像,从而形成双棱镜单目立体视觉。其系统的结构简单、尺寸小,能够实现对狭小空间、油气管道等内部缺陷的测量,并且配置不同的几何参数可使双棱镜单目立体视觉系统具备不同的成像参数。
6.其中,上海交通大学的许燕玲等发明的专利cn 114383543a“单ccd双棱镜双目立体视觉传感器”就提出了一种单目立体视觉测量方法,其基于双棱镜分光原理设计了可调节基线长度的双目立体视觉传感器,该传感器利用了单个相机和一个双棱镜实现三维测量。但遗憾的是,该方案中未涉及到双棱镜几何参数对成像参数的影响分析,且并未对双棱镜有效折射区域进行深度研究。河北科技大学的张梅梅等在河北科技大学学报上发表了题为“基于双棱镜单摄像机立体视觉的p-gmaw熔池表面重建”的文章,该文章同样搭建了一套基于双棱镜的单目立体视觉系统,并分析了双棱镜立体视觉系统原理,但只在二维层面研究了折射率和入射光线与折射光线夹角的关系,未进一步探究其他结构参数对成像参数的影响。东北大学的周宇昂发表的题为“基于棱镜的单目立体视觉系统参数理论研究”的论文,分析了折射、棱镜角度、相机焦距等因素对双棱镜公共视场的影响,并根据公共视场类型进行了分类讨论,但该文章依旧只在二维层面对单目立体视觉公共视场进行分析,成像参数分析不全面。
7.因此,如何根据不同测量需求,对三维光路进行分析以确定双棱镜单目立体视觉系统的几何参数和成像参数间的关系,从而设计合理的双棱镜单目立体视觉系统对本领域技术人员而言具有重要意义。
技术实现要素:
8.本发明提供了一种双棱镜单目立体视觉系统三维光路分析方法,其具体通过对由一个双棱镜和一个真实相机组成的双棱镜单目立体视觉系统进行三维光路分析,最终计算得到双棱镜的有效几何参数和双棱镜单目立体视觉系统的成像参数。
9.一种双棱镜单目立体视觉系统三维光路分析方法,包括有如下步骤:步骤一、搭建双棱镜单目立体视觉系统;步骤二、构建双棱镜单目立体视觉系统的坐标系,并对双棱镜单目立体视觉系统进行参数定义;步骤三、建立双棱镜单目立体视觉系统的折射模型;步骤四、确定双棱镜单目立体视觉系统成像的有效区域,对双棱镜单目立体视觉系统的参数进行计算。
10.进一步优选的,所述步骤一可具体描述为:选用一个真实相机与一个双棱镜组成双棱镜单目立体视觉系统;其中,将双棱镜置于真实相机的前方,并将真实相机的靶面分成对称的左靶面和右靶面;左靶面与右靶面分别对应目标成像的两个视角。
11.进一步优选的,所述步骤二可具体描述为:以真实相机的光心作为坐标系的原点,以真实相机光轴方向作为坐标系的轴,构建得到双棱镜单目立体视觉系统的坐标系;双棱镜的底面与坐标系中平面平行,双棱镜的顶边与坐标系中轴共面且平行;将真实相机的焦距定义为,真实相机光心到双棱镜顶边的距离定义为,双棱镜底面与顶面之间的夹角定义为,双棱镜在水平方向上的长度定义为,双棱镜的折射率定义为。
12.进一步优选的,所述步骤三可具体描述为:令左靶面上的像素点为令左靶面上的像素点为,该左靶面上的像素点所对应的入射光线的单位方向向量,满足:
ꢀꢀ
式(1.1);其式(1.1)中,左上标数字表示不同的光线类型,右下标符号
“”
表示第条入射光线,表示向量归一化;令入射光线与左侧顶面的交点为,该交点的坐标分量,满足:
ꢀꢀ
式(2.1);该交点可表示为:
ꢀꢀ
式(3.1);入射光线自空气介质经过左侧顶面射入双棱镜的第一次折射光线,满足:
ꢀꢀ
式(4.1);其式(4.1)中,为左侧顶面的单位法向量,满足:
ꢀꢀ
式(5.1);令双棱镜底面的单位法向量为,第一次折射光线与双棱镜底面的交点可表示为:
ꢀꢀ
式(6.1);其式(6.1)中,是从真实相机原点到双棱镜底面的距离;满足:,交点满足:;第一次折射光线自双棱镜介质经过双棱镜底面射入空气介质的第二次折射光线可表示为:
ꢀꢀ
式(7.1)。
13.进一步优选的,所述步骤三还可具体描述为:
令右靶面上的像素点为令右靶面上的像素点为,该右靶面上的像素点所对应的入射光线的单位方向向量,满足:
ꢀꢀ
式(1.2);其式(1.2)中,左上标数字表示不同的光线类型,右下标符号
“”
表示第条入射光线,表示向量归一化;令入射光线与右侧顶面的交点为,该交点的坐标分量,满足:
ꢀꢀ
式(2.2);该交点可表示为:
ꢀꢀ
式(3.2);入射光线自空气介质经过右侧顶面射入双棱镜的第一次折射光线,满足:
ꢀꢀ
式(4.2);其式(4.2)中,为右侧顶面的单位法向量,满足:
ꢀꢀ
式(5.2);令双棱镜底面的单位法向量为,第一次折射光线与双棱镜底面的交点可表示为:
ꢀꢀ
式(6.2);
其式(6.2)中,是从真实相机原点到双棱镜底面的距离;第一次折射光线自双棱镜介质经过双棱镜底面射入空气介质的第二次折射光线可表示为:
ꢀꢀ
式(7.2)。
14.进一步优选的,所述步骤四可具体描述为:双棱镜单目立体视觉系统成像的有效区域几何属性满足:
ꢀꢀ
式(8);其式(8)中,为交点在双棱镜底面上所围成有效区域的面积;为有效区域轴方向长度值;为有效区域轴方向长度值;为有效区域的最小外接圆半径;双棱镜单目立体视觉系统的参数,满足:
ꢀꢀ
式(9);其式(9)中,为轴方向上的最大视场;和是在轴方向上的最小视场和最大视场;和是在轴方向上的最小视场和最大视场;是最大视场处的物距;、、、、满足:
ꢀꢀ
式(10);其式(10)中,符号
“”
表示两折射光线方向向量相交。
15.本发明提供了一种双棱镜单目立体视觉系统三维光路分析方法,该分析方法中包括有搭建双棱镜单目立体视觉系统;构建双棱镜单目立体视觉系统的坐标系,并对双棱镜单目立体视觉系统进行参数定义;建立双棱镜单目立体视觉系统的折射模型;确定双棱镜单目立体视觉系统成像的有效区域,对双棱镜单目立体视觉系统的参数进行计算等的步骤特征。具有上述步骤特征的双棱镜单目立体视觉系统三维光路分析方法,从三维层面对双棱镜单目立体视觉系统进行空间光路分析,计算出双棱镜单目立体视觉系统的成像的有效区域几何属性,并得出双棱镜单目立体视觉系统结构参数与成像参数之间的关系。与现有二维光路分析方法相比,本发明在三维层面分析了双棱镜单目立体视觉系统的成像视场,更加全面的获取双棱镜单目立体视觉系统成像参数和形状几何参数,为双棱镜单目立体视觉系统设计提供了更充足的数据支持,使双棱镜单目立体视觉系统能给满足测量需求。
附图说明
16.该附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
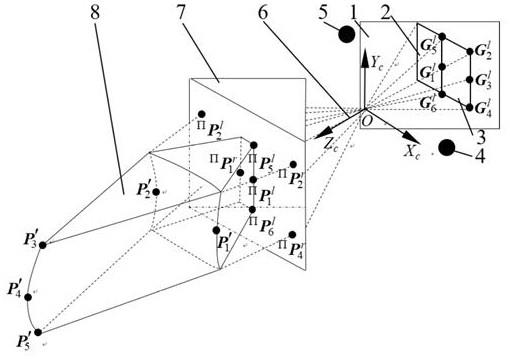
17.图1为一种双棱镜单目立体视觉系统的光路示意图。
18.图2为双棱镜单目立体视觉系统成像有效区域的几何参数示意图。
19.附图标记:1、真实相机;2、左靶面;3、右靶面;4、左虚拟相机;5、右虚拟相机;6、真实相机坐标系;7、双棱镜;8、公共视场。
具体实施方式
20.本发明提供了一种双棱镜单目立体视觉系统三维光路分析方法,其具体通过对由一个双棱镜和一个真实相机组成的双棱镜单目立体视觉系统进行三维光路分析,最终计算得到双棱镜的有效几何参数和双棱镜单目立体视觉系统的成像参数。
21.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
22.一种双棱镜单目立体视觉系统三维光路分析方法,包括有如下步骤:步骤一、搭建双棱镜单目立体视觉系统。
23.具体的,作为本发明的一种较为优选的实施方式,该步骤一可具体描述为:选用一个真实相机(举例来说,真实相机采集帧频为60帧,分辨率为1280
×
1040像素,像元尺寸为
3.45μm,并配备12mm的定焦镜头)与一双棱镜组成双棱镜单目立体视觉系统,将双棱镜置于真实相机的前方,并将真实相机的靶面分成对称的左靶面和右靶面;左靶面与右靶面分别对应目标成像的两个视角。其中,如图1所示,图1即提供了一种双棱镜单目立体视觉系统的光路示意图。
24.步骤二、构建双棱镜单目立体视觉系统的坐标系,并对双棱镜单目立体视觉系统进行参数定义。
25.具体的,步骤二可具体描述为:以真实相机的光心作为坐标系的原点,以真实相机光轴方向作为坐标系的轴,构建得到双棱镜单目立体视觉系统的坐标系;双棱镜的底面与坐标系中平面平行,双棱镜的顶边与坐标系中轴共面且平行;将真实相机的焦距定义为,真实相机光心到双棱镜顶边的距离定义为,双棱镜底面与顶面之间的夹角定义为,双棱镜在水平方向上的长度定义为,双棱镜的折射率定义为。结合前文提供的真实相机,可以得到其参数参考如下:真实相机光心到双棱镜顶边的距离为,双棱镜底面与顶面之间的夹角为,双棱镜在水平方向上的长度为,双棱镜材料的折射率为。
26.步骤三、建立双棱镜单目立体视觉系统的折射模型;值得注意的是,由于真实相机的靶面分成了对称的左靶面和右靶面,以下首先以左靶面为例进行如下介绍说明:具体的,作为本发明的另一种较为优选的实施方式,步骤三可具体描述为:令左靶面上的像素点为上的像素点为,该左靶面上的像素点所对应的入射光线的单位方向向量,满足:
ꢀꢀ
式(1.1);其式(1.1)中,左上标数字表示不同的光线类型,右下标符号
“”
表示第条入射光线,表示向量归一化;令入射光线与左侧顶面的交点为(需要注意的是,以平面为例,过点作左靶面的平行线并与光轴交于点,此时可建立与相似关系,其中点为左靶面与光轴的交点),该交点的坐标分量,满足:
ꢀꢀ
式(2.1);该交点可表示为:
ꢀꢀ
式(3.1)。
27.入射光线自空气介质经过左侧顶面射入双棱镜的第一次折射光线,满足:
ꢀꢀ
式(4.1);其式(4.1)中,为左侧顶面的单位法向量,满足:
ꢀꢀ
式(5.1)。
28.令双棱镜底面的单位法向量为,第一次折射光线与双棱镜底面的交点可表示为:
ꢀꢀ
式(6.1);其式(6.1)中,是从真实相机原点到双棱镜底面的距离;满足:,交点满足:;第一次折射光线自双棱镜介质经过双棱镜底面射入空气介质的第二次折射光线可表示为:
ꢀꢀ
式(7.1)。
29.代入具体数据,双棱镜单目立体视觉系统左靶面的折射模型计算过程则参考如下:左靶面上点分别记为:、、
、、和。根据公式(1.1)和公式(3.1),可求得入射光线和点分别为、、、、、和、、、、、。
30.而后,令双棱镜左侧顶面的单位法向量,空气介质折射率为,根据公式(4.1),求得第一次折射光线分别为、、、、和。
31.再而后,令双棱镜底面的单位法向量,根据公式(6.1)和公式(7.1),求得第二次折射光线和点分别为:、、、、、和、、、、、。
32.此外,作为本发明的另一种较为优选的实施方式,以右靶面为例进行如下介绍说明:令右靶面上的像素点为令右靶面上的像素点为,该右靶面上的像素点所对应的入射光线的单位方向向量,满足:
ꢀꢀ
式(1.2);其式(1.2)中,左上标数字表示不同的光线类型,右下标符号
“”
表示第条入射
光线,表示向量归一化;令入射光线与右侧顶面的交点为,该交点的坐标分量,满足:
ꢀꢀ
式(2.2);该交点可表示为:
ꢀꢀ
式(3.2);入射光线自空气介质经过右侧顶面射入双棱镜的第一次折射光线,满足:
ꢀꢀ
式(4.2);其式(4.2)中,为右侧顶面的单位法向量,满足:
ꢀꢀ
式(5.2);令双棱镜底面的单位法向量为,第一次折射光线与双棱镜底面的交点可表示为:
ꢀꢀ
式(6.2);其式(6.2)中,是从真实相机原点到双棱镜底面的距离;第一次折射光线自双棱镜介质经过双棱镜底面射入空气介质的第二次折射光线可表示为:
ꢀꢀ
式(7.2)。
33.步骤四、确定双棱镜单目立体视觉系统成像的有效区域,对双棱镜单目立体视觉系统的参数进行计算。
34.具体的,步骤四可具体描述为:双棱镜单目立体视觉系统成像的有效区域几何属性满足:
ꢀꢀ
式(8);其式(8)中,为交点在双棱镜底面上所围成有效区域的面积;为有效区域轴方向长度值;为有效区域轴方向长度值;为有效区域的最小外接圆半径。
35.需要补充的一点是,当第二次折射光线时,左虚拟相机与右虚拟相机的公共视场无最大视场,这种情况理应舍弃,故在此不做讨论。而当第二次折射光线时,左虚拟相机与右虚拟相机的公共视场存在最大视场,对此情况进行双棱镜单目立体视觉系统光路分析。
36.双棱镜单目立体视觉系统的参数,满足:
ꢀꢀ
式(9);其式(9)中,为轴方向上的最大视场;和是在轴方向上的最小视场和最大视场;和是在轴方向上的最小视场和最大视场;是最大视场处的物距;、、、、满足:
ꢀꢀ
式(10);其式(10)中,符号
“”
表示两折射光线方向向量相交。
37.需要补充说明的是一点是,对于双棱镜单目立体视觉系统而言,双棱镜底面与第二次折射光线(即和,此时下标指左靶面与右靶面边界上所有点序号)的交点共同围成了双棱镜单目立体视觉系统的公共视场,因折射现象使公共视场为不规则立体图形,故选取第二次折射光线(和)相交特殊点并进行简化计算。
38.具体的,折射光线交点在双棱镜底面上组成近似矩形的曲线四边形,故以近似矩形为其有效面积,参考如图2所示,根据公式(8)可得到双棱镜单目立体视觉系统成像的有效区域:即交点在双棱镜底面上所围成有效区域面积,有效区域轴方向长度值,有效区域轴方向长度值,有效区域的最小外接圆半径。
39.由于,公共视场存在最大视场。由公式(9)和公式(10)可求得双棱镜单目立体视觉系统成像参数为:在轴方向上的最大视场;在轴方向上的最小视场;在轴方向上的最大视场;在轴方向上的最小视场;在轴方向上的最大视场;最大视场处的物距。
40.本发明提供了一种双棱镜单目立体视觉系统三维光路分析方法,该分析方法中包括有搭建双棱镜单目立体视觉系统;构建双棱镜单目立体视觉系统的坐标系,并对双棱镜单目立体视觉系统进行参数定义;建立双棱镜单目立体视觉系统的折射模型;确定双棱镜单目立体视觉系统成像的有效区域,对双棱镜单目立体视觉系统的参数进行计算等的步骤特征。具有上述步骤特征的双棱镜单目立体视觉系统三维光路分析方法,从三维层面对双棱镜单目立体视觉系统进行空间光路分析,计算出双棱镜单目立体视觉系统的成像的有效区域几何属性,并得出双棱镜单目立体视觉系统结构参数与成像参数之间的关系。与现有二维光路分析方法相比,本发明在三维层面分析了双棱镜单目立体视觉系统的成像视场,更加全面的获取双棱镜单目立体视觉系统成像参数和形状几何参数,为双棱镜单目立体视觉系统设计提供了更充足的数据支持,使双棱镜单目立体视觉系统能给满足测量需求。
41.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1