一种自动牵引配送系统及方法与流程
本发明属于自动配送,具体涉及一种自动牵引配送系统及方法。
背景技术:
1、无人物流车作为智慧物流实现的基础和重要组成部分,具备不受场地、道路和空间限制等优势,在机场、码头、工业园区、生活园区等场景下实现配送的智慧化、品质化。随着无人驾驶系统的逐步产业化落地,厂区无人物流、港口无人物流、矿区无人物流逐渐兴起,无人化运输逐渐成为这些领域的运营常态。目前物流配送主要依靠人工驾驶牵引车、叉车等设备进行配送,且配送过程中需要人工操作实现物料的装载和卸载,这对于大规模的配送系统,存在管理困难、效率低下、自动化、智能化程度较低等问题。
2、现代物流业呈稳步增长态势,欧洲、美国、日本成为当前全球范围内的重要物流基地。中国物流行业虽然起步较晚,但是随着国民经济的飞速发展以电子商务的爆发式增长,中国物流行业保持较快的增长速度。目前的无人驾驶物流运输,其无人化程度集中于运输端,无人驾驶基本集中在所有车辆设备准备完成后,即车辆在道路上的无人驾驶运输,在站点或者作业点还无法实现真正的无人化,带来无人车辆使用的不便。尤其是无人物流物料的脱挂操作,一直没能实现完全的无人化运营,因此需要一种物流配送效率高且物流运营成本低的物流配送方法。
技术实现思路
1、本发明的目的在于提供一种自动牵引配送系统及方法,用以解决现有配送系统效率低、运营成本高的问题。
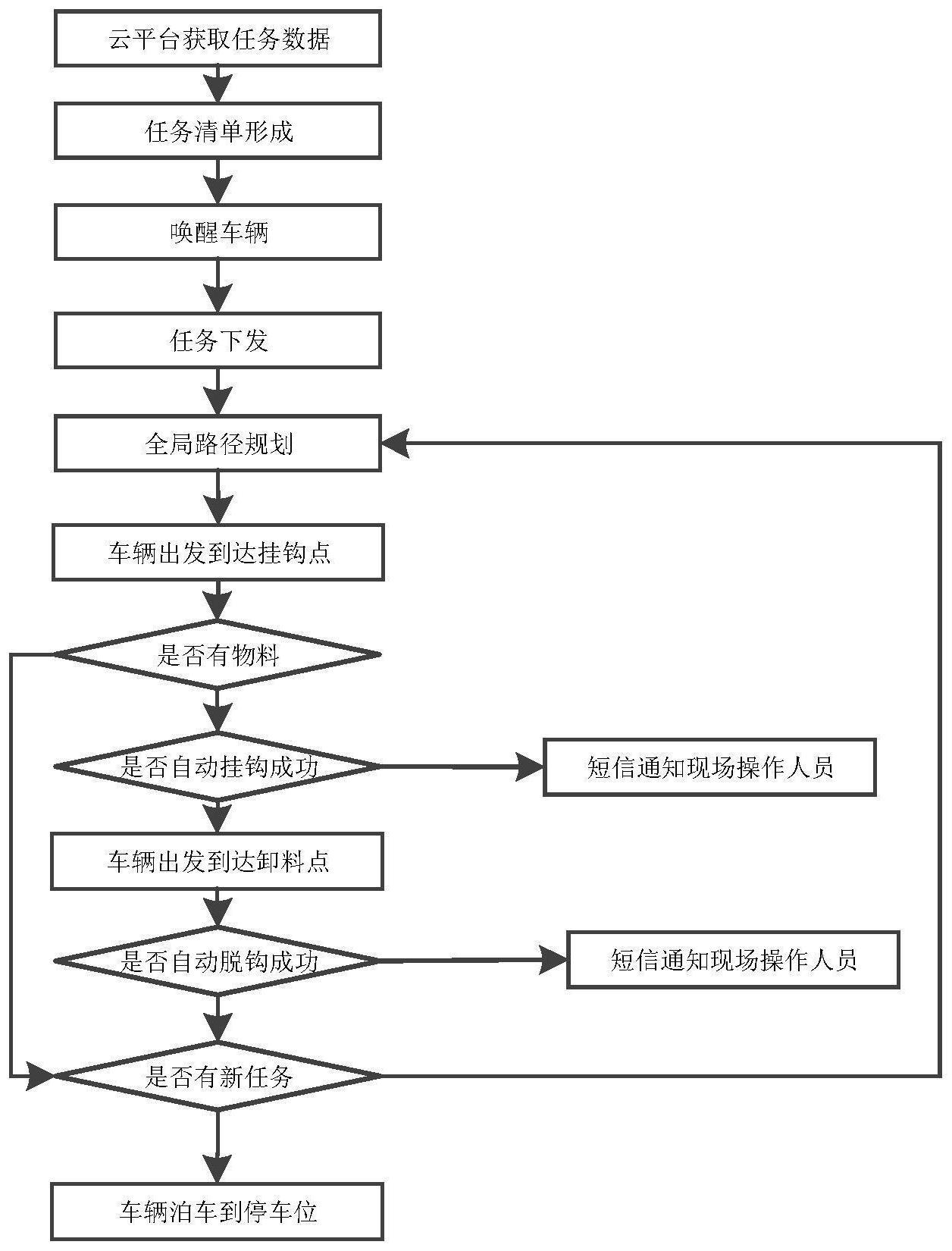
2、为解决上述技术问题,本发明提供了一种自动牵引配送方法,包括以下步骤:
3、1)获取配送任务数据以形成配送任务清单,将任务下发给各可用的配送车辆;
4、2)根据配送任务对各配送车辆进行路径规划,使配送车辆从当前位置到达上料点,在上料点执行上料动作,并在上料完成后从上料点到达卸料点,在卸料点执行卸料动作,从而完成一次配送任务;
5、3)在配送车辆完成当前配送任务后,判断是否有新的配送任务,若有新的配送任务则重新执行步骤2),否则自动泊车到对应的停车位。
6、其有益效果为:本发明的自动牵引配送方法是一套全自动化的牵引自动配送流程,首先通过获取任务数据以形成任务清单,将任务下发给配送车辆,然后进行路径规划,执行上料动作和卸料动作,完成一次配送任务,最后在配送车辆完成当前配送任务后,判断是否有新配送任务,若有新配送任务则重新进行路径规划并依据重新规划的路径完成配送任务,并在所有配送任务完成后自动泊车到对应的停车位,实现了对所有配送车辆的自动化管理与控制,以完成大规模的无人运输作业。该方法取消了物流运输过程中的人员参与,提高了物资转运的效率,降低了运营成本,能够保障物流调度任务稳定高效的开展。
7、进一步地,步骤2)中,在执行所述上料动作时,需先判断配送车辆后方是否存在物料:若存在物料,则使配送车辆行驶至挂钩点进行挂钩操作,以将物料挂接至配送车辆上,从而完成上料动作。
8、其有益效果为:上料过程车辆先到达上料点,再自动完成挂钩操作,整个过程无需人工参与,提高了物资转运的效率,降低了运营成本,能够保障物流调度任务稳定高效的开展。
9、进一步地,采用如下方法判断配送车辆后方是否存在物料:在配送车辆到达上料点后,在配送车辆后方设定位置构造一个判断区域,所述判断区域与配送车辆之间的距离为用于牵引物料的牵引环的长度;计算检测到的每一个物料占据判断区域的比例,当比例和物料宽度均大于相应的标定值时,判定此时配送车辆后方存在需挂接的物料。
10、其有益效果为:通过该物料判断方法,能够准确地判断配送车辆后方是否存在需要挂接的物料,进而能够提高物资转运的效率,降低运营成本,能够保障物流调度任务稳定高效的开展。
11、进一步地,所述判断区域为矩形。
12、进一步地,在配送车辆配送过程中或回到停车位后,实时监测车辆电量,当车辆电量低于设定值时,若有配送任务则先完成当前配送任务,再控制配送车辆自动泊车到充电位对该配送车辆进行充电;若无配送任务,则直接控制配送车辆自动到充电位对该配送车辆进行充电。
13、其有益效果为:配送车辆实时监测剩余电量,电量不足时自动前往充电位充电,能够防止配送车辆在配送途中因断电而停车,导致任务中断无法完成,提高了配送任务的可靠性,进而能够提高物资转运的效率,降低运营成本,能够保障物流调度任务稳定高效的开展。
14、进一步地,步骤2)中,配合地图实现所述路径规划。
15、其有益效果为:配合地图进行路径规划,能够更加准确快速地实现路径规划,进而能够提高物资转运的效率,降低运营成本,能够保障物流调度任务稳定高效的开展。
16、进一步地,当所述配送车辆出现故障时停车,进行上报提醒,以通知现场人员检查。
17、其有益效果为:配送车辆出现故障时停车,通知现场人员进行检查,能够及时排除故障,提高了车辆运行的可靠性,进而能够提高物资转运的效率,降低运营成本,能够保障物流调度任务稳定高效的开展。
18、为解决上述技术问题,本发明还提供了一种自动牵引配送系统,所述系统包括云平台、配送车辆和自动脱挂装置,所述云平台和配送车辆之间通信连接;所述自动脱挂装置包括设置在配送车辆上的牵引环和设置在物料上的自动脱挂装置本体;
19、所述云平台和配送车辆之间配合工作并采用如权利要求1~7任一项所述的自动牵引配送方法实现自动牵引配送。
20、其有益效果为:本发明提供的自动牵引配送系统,能够实现如权利要求1~7任一项所述的自动牵引配送方法,并达到与该方法相同的有益效果。
21、进一步地,所述配送车辆上设置有雷达,用于检测物料。
22、其有益效果为:配送车辆上的雷达能够准确地检测物料,进而提高了物资转运的效率,降低了运营成本,能够保障物流调度任务稳定高效的开展。
技术特征:
1.一种自动牵引配送方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的自动牵引配送方法,其特征在于,步骤2)中,在执行所述上料动作时,需先判断配送车辆后方是否存在物料:若存在物料,则使配送车辆行驶至挂钩点进行挂钩操作,以将物料挂接至配送车辆上,从而完成上料动作。
3.根据权利要求2所述的自动牵引配送方法,其特征在于,采用如下方法判断配送车辆后方是否存在物料:在配送车辆到达上料点后,在配送车辆后方设定位置构造一个判断区域,所述判断区域与配送车辆之间的距离为用于牵引物料的牵引环的长度;计算检测到的每一个物料占据判断区域的比例,当比例和物料宽度均大于相应的标定值时,判定此时配送车辆后方存在需挂接的物料。
4.根据权利要求3所述的自动牵引配送方法,其特征在于,所述判断区域为矩形。
5.根据权利要求1所述的自动牵引配送方法,其特征在于,在配送车辆配送过程中或回到停车位后,实时监测车辆电量,当车辆电量低于设定值时,若有配送任务则先完成当前配送任务,再控制配送车辆自动泊车到充电位对该配送车辆进行充电;若无配送任务,则直接控制配送车辆自动到充电位对该配送车辆进行充电。
6.根据权利要求1所述的自动牵引配送方法,其特征在于,步骤2)中,配合地图实现所述路径规划。
7.根据权利要求1所述的自动牵引配送方法,其特征在于,当所述配送车辆出现故障时停车,进行上报提醒,以通知现场人员检查。
8.一种自动牵引配送系统,其特征在于,所述系统包括云平台、配送车辆和自动脱挂装置,所述云平台和配送车辆之间通信连接;所述自动脱挂装置包括设置在配送车辆上的牵引环和设置在物料上的自动脱挂装置本体;所述云平台和配送车辆之间配合工作并采用如权利要求1~7任一项所述的自动牵引配送方法实现自动牵引配送。
9.根据权利要求8所述的自动牵引配送系统,其特征在于,所述配送车辆上设置有雷达,用于检测物料。
技术总结
本发明属于自动配送技术领域,具体涉及一种自动牵引配送系统及方法。包括以下步骤:1)获取配送任务数据以形成配送任务清单,将任务下发给各可用的配送车辆;2)根据配送任务对各配送车辆进行路径规划,使配送车辆从当前位置到达上料点,在上料点执行上料动作,并在上料完成后从上料点到达卸料点,在卸料点执行卸料动作,从而完成一次配送任务;3)在配送车辆完成当前配送任务后,判断是否有新的配送任务,若有新的配送任务则重新执行步骤2),否则自动泊车到对应的停车位。本发明的自动牵引配送方法,提高了物资转运的效率,降低了运营成本,能够保障物流调度任务稳定高效的开展。
技术研发人员:王小娟,黄琨,曹鹭萌,闫孟洋,位跃辉,刘国荣,何亮
受保护的技术使用者:宇通客车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!