基于深度神经网络的大脑腔隙性梗死灶识别系统及方法
本发明涉及医疗图像技术及设备,尤其涉及基于深度神经网络的大脑腔隙性梗死灶识别系统及方法。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、腔隙性梗死病灶(lacunar infarction,li)是与脑小血管相关的充满组织液的闭合小腔。
3、腔隙性梗死灶的鉴定识别主要通过人工对大脑磁共振成像(magnetic resonanceimaging,mri)中的flair模态进行诊断判断,具体为:将大脑的三维flair图像导入相关商业软件或开源可视化软件中,如mricron或者itk-snap软件,逐层进行筛查。筛查过程中存在两个挑战:1)由于腔隙性梗死灶大部分是孤立的、形状不规则的,且梗死灶小区域的个数不等,需要对整个三维图像进行逐片层筛选,完成一个大脑的腔隙计数和标注工作至少需要20分钟时间,人工时间开销大,且识别速度慢;2)筛查过程中,腔隙梗死灶容易与另一种病灶---血管周围间隙产生混淆,识别准确率偏低;3)腔隙性梗死灶周围有白边,而血管周围间隙周围没有白边,有些老年人大脑内会有大量的白质高信号,如果腔隙性梗死灶和血管周围间隙位于这些白质高信号区域内,则会进一步降低腔隙性梗死灶识别的速率和准确率。
4、基于人工对腔隙性梗死灶进行识别,识别速率和准确率较低的问题,提出了一种针对脑腔梗死灶分析的半自动识别系统,基于深度学习方法,对可疑的候选区域,通过多尺度残差神经网络进行特征提取,进而预测该区域是否属于含有脑腔梗死灶的阳性病灶,尽管该框架在一定程度上提高了腔隙性梗死灶识别的准确率,但是依然需要通过交互操作人工获取候选区域,并将候选区域的坐标信息作为位置先验,识别速率和准确率依然较低。
技术实现思路
1、本发明为了解决上述问题,提出了基于深度神经网络的大脑腔隙性梗死灶识别系统及方法,能够实现腔隙性梗死灶的自动识别分割,提高了腔隙性梗死灶分割的准确率和速率。
2、为实现上述目的,本发明采用如下技术方案:
3、第一方面,提出了基于深度神经网络的大脑腔隙性梗死灶识别系统,包括:
4、图像获取模块,用于获取大脑磁共振图像;
5、预处理模块,用于对大脑磁共振图像进行体素划分;
6、候选位置坐标获取模块,用于根据大脑磁共振图像的体素坐标和训练好的腔隙性梗死灶候选位置坐标检测模型,获得腔隙性梗死灶候选位置坐标;
7、腔隙性梗死灶确定模块,用于获取以每个腔隙性梗死灶候选位置坐标为中心的多尺度区域块,根据多尺度区域块和训练好的腔隙性梗死灶识别模型,获得腔隙性梗死灶区域;
8、腔隙性梗死灶区域分割模块,用于根据腔隙性梗死灶区域,对完整的腔隙性梗死灶进行体积分割和计算。
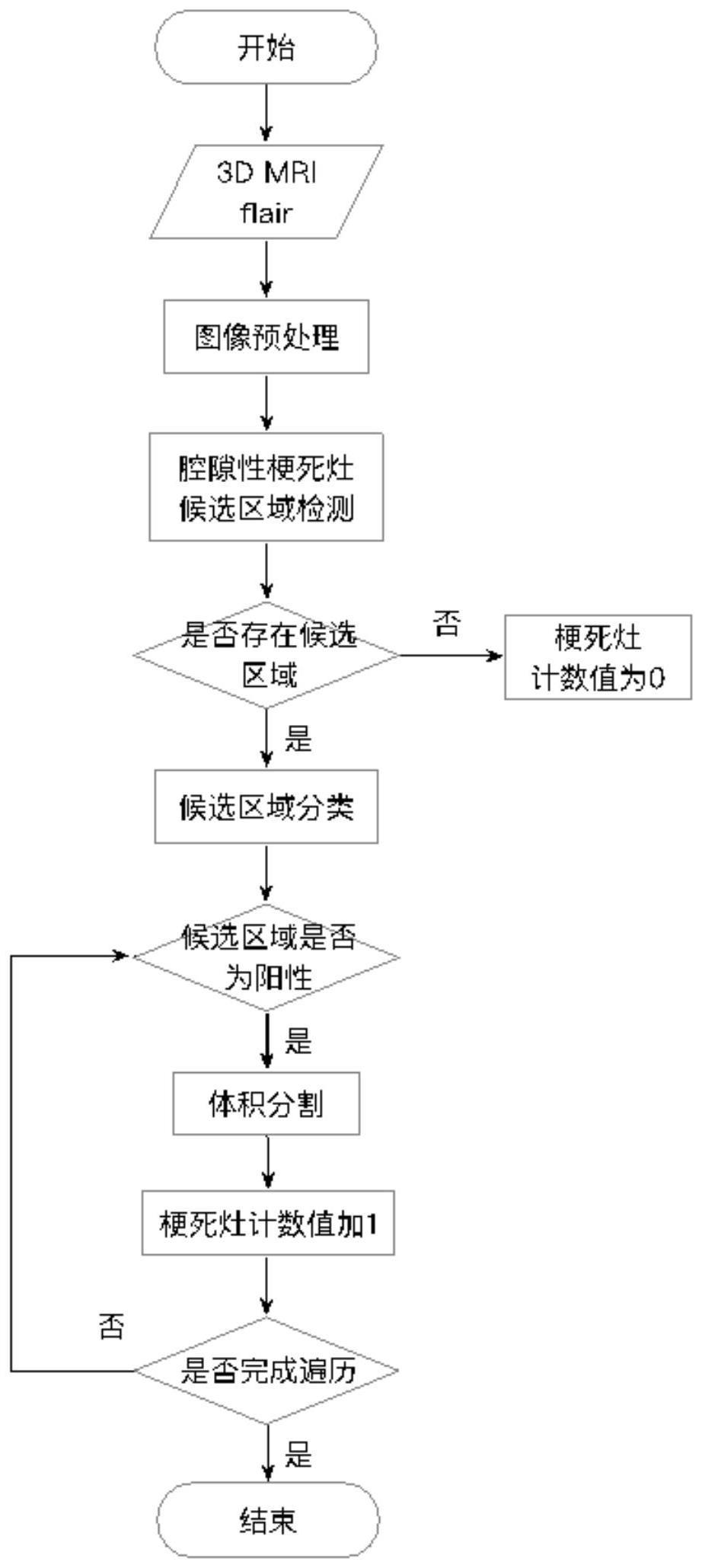
9、第二方面,提出了基于深度神经网络的大脑腔隙性梗死灶识别方法,包括:
10、获取大脑磁共振图像;
11、对大脑磁共振图像进行体素划分;
12、根据大脑磁共振图像的体素坐标和训练好的腔隙性梗死灶候选位置坐标检测模型,获得腔隙性梗死灶候选位置坐标;
13、获取以每个腔隙性梗死灶候选位置坐标为中心的多尺度区域块,根据多尺度区域块和训练好的腔隙性梗死灶识别模型,获得腔隙性梗死灶区域;
14、根据腔隙性梗死灶区域,对完整的腔隙性梗死灶进行体积分割和计算。
15、第三方面,提出了一种电子设备,包括存储器和处理器以及存储在存储器上并在处理器上运行的计算机指令,所述计算机指令被处理器运行时,完成基于深度神经网络的大脑腔隙性梗死灶识别方法所述的步骤。
16、第四方面,提出了一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时,完成基于深度神经网络的大脑腔隙性梗死灶识别方法所述的步骤。
17、与现有技术相比,本发明的有益效果为:
18、1、本发明能够实现腔隙性梗死灶的自动识别分割,提高了腔隙性梗死灶分割的准确率和速率。
19、2、本发明在根据每个腔隙通道的最大体素概率值,确定了腔隙性梗死灶候选位置坐标后,获取以每个腔隙性梗死灶候选位置坐标为中心的多尺度区域块,根据多尺度区域块和训练好的腔隙性梗死灶识别模型,获得腔隙性梗死灶区域,通过选定多尺度区域块,并通过训练好的腔隙性梗死灶识别模型对多尺度区域块进行识别,提高了腔隙性梗死灶区域识别的准确率。
20、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.基于深度神经网络的大脑腔隙性梗死灶识别系统,其特征在于,包括:
2.如权利要求1所述的基于深度神经网络的大脑腔隙性梗死灶识别系统,其特征在于,预处理模块对大脑磁共振图像进行体素划分之前,首先对大脑磁共振图像进行颅骨剥离,并对颅骨剥离后图像进行标准脑图空间配准及n4偏差校正,获得配准后图像,最后对配准后图像进行体素划分。
3.如权利要求2所述的基于深度神经网络的大脑腔隙性梗死灶识别系统,其特征在于,预处理模块采用双三次插值方式,对配准后图像进行体素划分。
4.如权利要求1所述的基于深度神经网络的大脑腔隙性梗死灶识别系统,其特征在于,腔隙性梗死灶候选位置坐标获取模块获得腔隙性梗死灶候选位置坐标的具体过程为:
5.如权利要求1所述的基于深度神经网络的大脑腔隙性梗死灶识别系统,其特征在于,腔隙性梗死灶候选位置坐标检测模型采用3d-unet,并在3d-unet中引入注意力机制。
6.如权利要求1所述的基于深度神经网络的大脑腔隙性梗死灶识别系统,其特征在于,腔隙性梗死灶确定模块通过多尺度残差神经网络构建腔隙性梗死灶识别模型,其输入为多尺度区域块,输出为腔隙性梗死灶区域。
7.如权利要求1所述的基于深度神经网络的大脑腔隙性梗死灶识别系统,其特征在于,腔隙性梗死灶区域分割模块,对完整腔隙性梗死灶进行体积分割和计算的过程为:
8.基于深度神经网络的大脑腔隙性梗死灶识别方法,其特征在于,包括:
9.一种电子设备,其特征在于,包括存储器和处理器以及存储在存储器上并在处理器上运行的计算机指令,所述计算机指令被处理器运行时,完成权利要求8所述的基于深度神经网络的大脑腔隙性梗死灶识别方法的步骤。
10.一种计算机可读存储介质,其特征在于,用于存储计算机指令,所述计算机指令被处理器执行时,完成权利要求8所述的基于深度神经网络的大脑腔隙性梗死灶识别方法的步骤。
技术总结
本发明公开的基于深度神经网络的大脑腔隙性梗死灶识别系统及方法,包括:图像获取模块,用于获取大脑磁共振图像;预处理模块,用于对大脑磁共振图像进行体素划分;候选位置坐标获取模块,用于根据大脑磁共振图像的体素坐标和训练好的腔隙性梗死灶候选位置坐标检测模型,获得腔隙性梗死灶候选位置坐标;腔隙性梗死灶确定模块,用于获取以每个腔隙性梗死灶候选位置坐标为中心的多尺度区域块,根据多尺度区域块和训练好的腔隙性梗死灶识别模型,获得腔隙性梗死灶区域;腔隙性梗死灶区域分割模块,用于根据腔隙性梗死灶区域,对完整的腔隙性梗死灶进行体积分割和计算。提高了腔隙性梗死灶识别的准确率和效率。
技术研发人员:刘治,安木军
受保护的技术使用者:山东大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!