一种机械螺旋天线阵列相位识别方法及多轴成像系统装置
本发明涉及数据处理,尤其涉及一种机械螺旋天线阵列相位识别方法及多轴成像系统装置。
背景技术:
1、机械螺旋天线阵列较于单螺旋天线有着快速扫描、波束形状捷变、空间功率合成、多波束形成能力等优点。然而机械螺旋天线阵列安装时,每个输出端口的相位往往不尽相同,而天线阵面辐射单元方向上的误差会引起口径场的相位分布的误差,以致引起天线增益下降、副瓣电平升高和波束指向不准确等,因此记录机械螺旋天线阵列的初始相位并调零是非常必要和重要的工作。
2、相位调零的目的是使得天线阵列在使用时,能够明确的知道每个单元天线所处的相位状态以及保证初始状态下阵列的轴向辐射。通常我们假设阵列的横向排列方向、正视角度的左端为零点,记录各端口所具有的初始相位,并按照此角度旋转相应的角度,使得天线阵列调致同一状态,这便是相控阵技术中非常关键的相位调零。
3、传统的调零方式,需要制作与所用阵列相匹配的工装,再人工依次调准每个单元天线的相位,整个流程较为费时费力,可重复性不强。
技术实现思路
1、本发明的目的在于提供一种机械螺旋天线阵列相位识别方法及多轴成像系统装置,旨在解决传统调零方式较为费时费力,可重复性不强的问题。
2、为实现上述目的,第一方面,本发明提供了一种机械螺旋天线阵列相位识别方法,包括以下步骤:
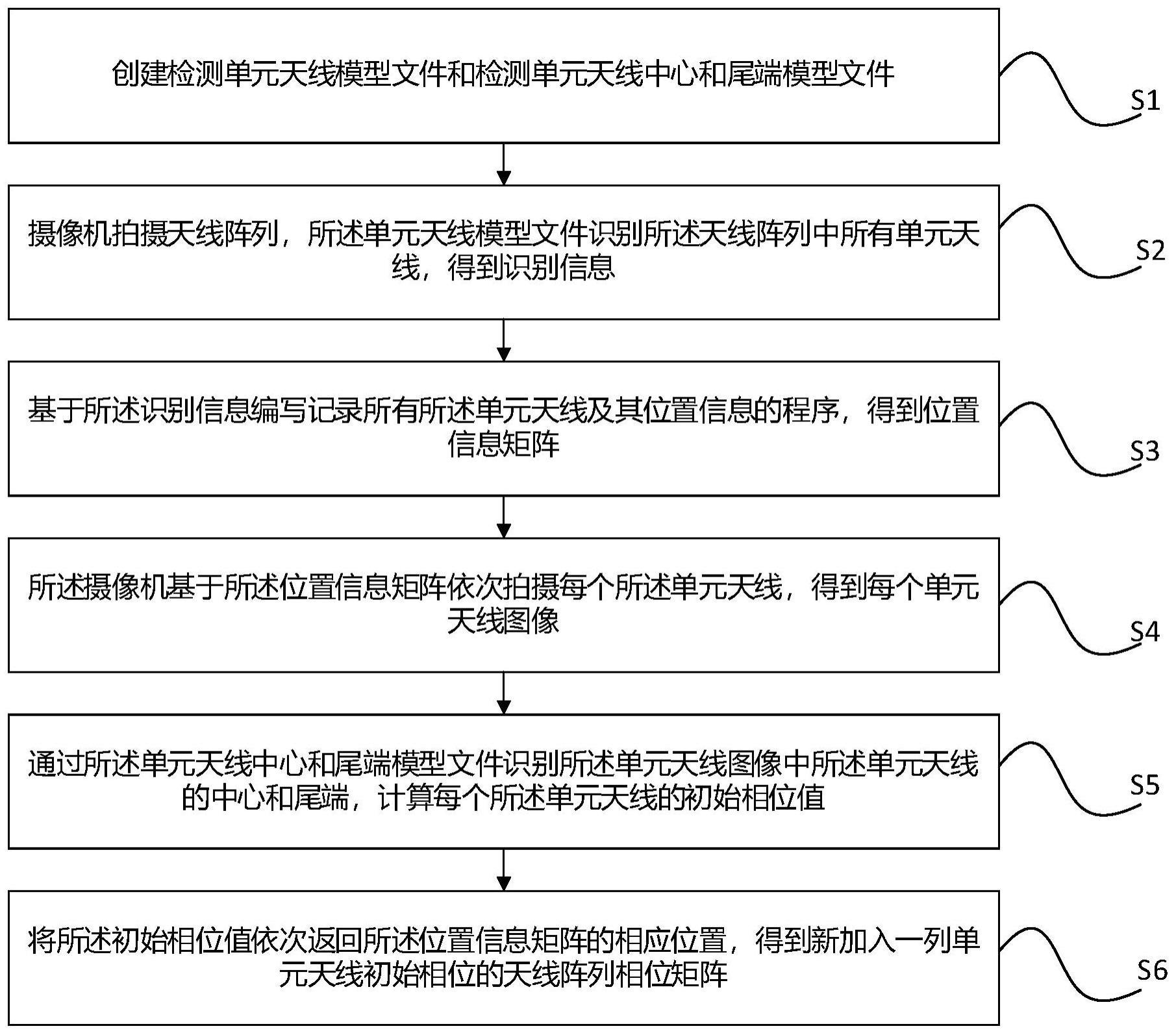
3、创建检测单元天线模型文件和检测单元天线中心和尾端模型文件;
4、摄像机拍摄天线阵列,所述单元天线模型文件识别所述天线阵列中所有单元天线,得到识别信息;
5、基于所述识别信息编写记录所有所述单元天线及其位置信息的程序,得到位置信息矩阵;
6、所述摄像机基于所述位置信息矩阵依次拍摄每个所述单元天线,得到每个单元天线图像;
7、通过所述单元天线中心和尾端模型文件识别所述单元天线图像中所述单元天线的中心和尾端,计算每个所述单元天线的初始相位值;
8、将所述初始相位值依次返回所述位置信息矩阵的相应位置,得到新加入一列单元天线初始相位的天线阵列相位矩阵。
9、其中,所述创建检测单元天线模型文件和检测单元天线中心和尾端模型文件的具体方式:
10、创建螺旋天线的数据集和螺旋天线的中心和尾端的数据集;
11、计算机对所述螺旋天线的数据集和所述螺旋天线的中心和尾端的数据集进行深度学习,得到所述单元天线模型文件和所述单元天线中心和尾端模型文件。
12、其中,所述计算机通过检测算法进行深度学习。
13、其中,所述摄像机拍摄天线阵列,所述单元天线模型文件识别所述天线阵列中所有单元天线,得到识别信息的具体方式:
14、摄像机拍摄天线阵列,得到拍摄结果,并将所述拍摄结果发送至计算机;
15、所述计算机调用所述单元天线模型文件识别所述拍摄结果中所有单元天线,得到识别信息。
16、其中,所述编写记录所有所述单元天线及其位置信息的程序,得到位置信息矩阵的具体方式:
17、编写顺序记录所述单元天线程序;
18、编写顺序记录所述单元天线的位置信息程序;
19、整理所述单元天线的程序和所述位置信息程序,得到所述位置信息矩阵。
20、其中,所述基于所述识别信息编写记录所有所述单元天线及其位置信息的程序,得到位置信息矩阵的具体方式:
21、基于所述识别信息编写顺序记录所述单元天线的程序;
22、基于所述识别信息编写顺序记录所述单元天线的位置信息程序;
23、整理所述单元天线的程序和所述位置信息程序,得到所述位置信息矩阵。
24、其中,所述摄像机基于所述位置信息矩阵依次拍摄每个所述单元天线,得到单元天线图像的具体方式:
25、基于所述位置信息矩阵改变所述摄像机的位置;
26、所述摄像机依次拍摄所述位置信息矩阵中的每个所述单元天线,得到所述单元天线图像。
27、其中,所述计算机调用所述单元天线中心和尾端模型文件识别所述单元天线图像中所述单元天线的中心和尾端,得到识别结果;
28、编写计算程序,并计算所述识别结果中每个所述单元天线的所述初始相位值。
29、其中,所述计算每个所述单元天线的初始相位值通过反正切函数进行计算。
30、其中,所述将所述初始相位值依次返回所述位置信息矩阵的相应位置,得到新加入一列单元天线初始相位的天线阵列相位矩阵的具体方式:
31、所述计算机将所述初始相位值返回所述位置信息矩阵;
32、所述初始相位值与对应所述单元天线进行配对,加入一列单元天线初始相位值信息,得到所述天线阵列相位矩阵。
33、第二方面,本发明还提供两种多轴成像系统装置,包括第一摄像机、机械臂、第二摄像机、第一导轨、第二导轨和滑轮,所述第一摄像机设置于所述滑轮一侧,所述滑轮设置于所述第一导轨上,所述第二摄像机设置于所述机械臂一侧,所述机械臂设置于所述第二导轨一侧。
34、本发明的一种机械螺旋天线阵列相位识别方法及多轴成像系统装置,创建检测单元天线模型文件和检测单元天线中心和尾端模型文件;摄像机拍摄天线阵列,所述单元天线模型文件识别所述天线阵列中所有单元天线,得到识别信息;基于所述识别信息编写记录所有所述单元天线及其位置信息的程序,得到位置信息矩阵;所述摄像机基于所述位置信息矩阵依次拍摄每个所述单元天线,得到每个单元天线图像;通过所述单元天线中心和尾端模型文件识别所述单元天线图像中所述单元天线的中心和尾端,计算每个所述单元天线的初始相位值;将所述初始相位值依次返回所述位置信息矩阵的相应位置,得到新加入一列单元天线初始相位的天线阵列相位矩阵,该方法采用图像识别的方式,通过所述计算机深度学习训练物体识别模型,编写算法并借助机械辅助图像识别机械螺旋天线阵列中每个所述单元天线的初始相位,从而完成调零工作,相较于传统方式而言具有可重复性,也更快速也更便捷,具有更高的推广性,解决传统调零方式较为费时费力,可重复性不强的问题。
技术特征:
1.一种机械螺旋天线阵列相位识别方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种机械螺旋天线阵列相位识别方法,其特征在于,
3.如权利要求2所述的一种机械螺旋天线阵列相位识别方法,其特征在于,
4.如权利要求1所述的一种机械螺旋天线阵列相位识别方法,其特征在于,
5.如权利要求1所述的一种机械螺旋天线阵列相位识别方法,其特征在于,
6.如权利要求1所述的一种机械螺旋天线阵列相位识别方法,其特征在于,
7.如权利要求1所述的一种机械螺旋天线阵列相位识别方法,其特征在于,
8.如权利要求1所述的一种机械螺旋天线阵列相位识别方法,其特征在于,
9.如权利要求1所述的一种机械螺旋天线阵列相位识别方法,其特征在于,
10.多轴成像系统装置,应用于如权利要求1所述的一种机械螺旋天线阵列相位识别方法,其特征在于,包括第一摄像机、机械臂、第二摄像机、第一导轨、第二导轨和滑轮,所述第一摄像机设置于所述滑轮一侧,所述滑轮设置于所述第一导轨上,所述第二摄像机设置于所述机械臂一侧,所述机械臂设置于所述第二导轨一侧。
技术总结
本发明涉及数据处理技术领域,具体涉及一种机械螺旋天线阵列相位识别方法及多轴成像系统装置,创建检测单元天线模型文件和检测单元天线中心和尾端模型文件;拍摄天线阵列,单元天线模型文件识别天线阵列中所有单元天线;编写记录单元天线及其位置信息的程序,得到位置信息矩阵;基于位置信息矩阵依次拍摄每个单元天线,得到单元天线图像;单元天线中心和尾端模型文件识别单元天线图像中单元天线的中心和尾端,计算每个单元天线的初始相位值;将初始相位值返回位置信息矩阵,得到天线阵列相位矩阵,该方法采用图像识别,识别天线阵列中每个单元天线的初始相位,完成调零工作,较传统方式而言具有可重复性,更加快捷。
技术研发人员:郭畅,邱嵩,王邦继,刘庆想
受保护的技术使用者:西南交通大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!