一种钻孔摄像探头误差校正方法、装置及系统
1.本发明涉及地质勘察技术领域,具体而言,涉及一种钻孔摄像探头误差校正方法、装置及系统。
背景技术:
2.钻孔摄像技术是一类利用光学原理和使用相关设备在钻孔内获取钻孔孔壁图像的技术方法,运用钻孔成像技术,可以准确并快速地获取钻孔内的工程地质信息。钻孔摄像设备通常由钻孔摄像探头、控制器等部件组成。钻孔摄像探头包括光源、摄像机等部件。在钻孔摄像设备工作时,光源照亮钻孔孔壁,摄像机捕获钻孔孔壁图像。
3.现有的钻孔摄像技术存在以下问题:(1)现有的钻孔摄像设备工作时,无法保证钻孔摄像探头处于钻孔轴线,即存在探头偏心的情况,导致现有的钻孔摄像技术无法实现钻孔摄像探头在孔中的三维定位;(2)钻孔摄像探头偏心会导致钻孔图像存在灰度误差、透视误差。现有的钻孔摄像技术无法针对此类误差实现图像补偿。
技术实现要素:
4.本发明解决的问题是如何实现钻孔摄像探头误差校正。
5.为解决上述问题,本发明提供一种钻孔摄像探头误差校正方法,包括:
6.建立钻孔摄像灰度特征模型;
7.获取钻孔孔壁展开图,根据所述钻孔孔壁展开图的图像灰度特征和所述钻孔摄像灰度特征模型确定钻孔摄像探头的三维坐标;
8.根据所述三维坐标和所述钻孔摄像灰度特征模型确定偏心灰度误差和偏心透视误差;
9.根据所述偏心灰度误差和所述偏心透视误差对所述钻孔孔壁展开图进行误差校正。
10.可选地,所述钻孔摄像灰度特征模型表示为:
[0011][0012]
其中,d(θ,h)表示所述钻孔孔壁展开图上点(θ,h)的灰度值,λ表示灰度参数,s表示点(θ,h)到光源的几何路程,rb表示钻孔孔壁半径。
[0013]
可选地,所述灰度参数与设备参数、扫描线半径和孔壁反射率相关。
[0014]
可选地,所述建立钻孔摄像灰度特征模型包括:
[0015]
根据光学原理确定任一点的曝光量;
[0016]
根据所述曝光量与摄像头的感光特性系数确定对应像素的灰度值。
[0017]
可选地,所述根据所述钻孔孔壁展开图的图像灰度特征和所述钻孔摄像灰度特征模型确定钻孔摄像探头的三维坐标包括:采用最小二乘法进行拟合确定所述钻孔摄像探头
的三维坐标。
[0018]
可选地,所述偏心灰度误差表示为:
[0019][0020]
其中,b(θ,h)表示所述偏心灰度误差,s表示点(θ,h)到光源的几何路程,rb表示钻孔孔壁半径。
[0021]
可选地,所述根据所述偏心灰度误差和所述偏心透视误差对所述钻孔孔壁展开图进行误差校正包括:
[0022]
根据所述偏心灰度误差确定灰度校正后的钻孔孔壁展开图像;
[0023]
根据所述偏心透视误差确定透视校正后的钻孔孔壁展开图像。
[0024]
本发明所述的钻孔摄像探头误差校正方法,根据建立的钻孔摄像灰度特征模型和钻孔孔壁展开图的图像灰度特征确定钻孔摄像探头的三维坐标,基于图像灰度特征实现钻孔摄像探头的孔中三维定位,再根据探头在钻孔中的三维位置确定偏心灰度误差和偏心透视误差,对钻孔摄像系统工作中由于探头偏心产生的灰度误差、透视误差实现误差校正,从而提高了钻孔摄像系统的测量准确性。
[0025]
本发明还提供一种钻孔摄像探头误差校正装置,包括:
[0026]
建模单元,用于建立钻孔摄像灰度特征模型;
[0027]
坐标单元,用于获取钻孔孔壁展开图,根据所述钻孔孔壁展开图的图像灰度特征和所述钻孔摄像灰度特征模型确定钻孔摄像探头的三维坐标;
[0028]
误差单元,用于根据所述三维坐标和所述钻孔摄像灰度特征模型确定偏心灰度误差和偏心透视误差;
[0029]
校正单元,用于根据所述偏心灰度误差和所述偏心透视误差对所述钻孔孔壁展开图进行误差校正。
[0030]
所述钻孔摄像探头误差校正装置与上述钻孔摄像探头误差校正方法相对于现有技术所具有的优势相同,在此不再赘述。
[0031]
本发明还提供一种钻孔摄像探头误差校正系统,包括存储有计算机程序的计算机可读存储介质和处理器,所述计算机程序被所述处理器读取并运行时,实现如上钻孔摄像探头误差校正方法。所述钻孔摄像探头误差校正系统与上述钻孔摄像探头误差校正方法相对于现有技术所具有的优势相同,在此不再赘述。
[0032]
本发明还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器读取并运行时,实现如上钻孔摄像探头误差校正方法。所述计算机可读存储介质与上述钻孔摄像探头误差校正方法相对于现有技术所具有的优势相同,在此不再赘述。
附图说明
[0033]
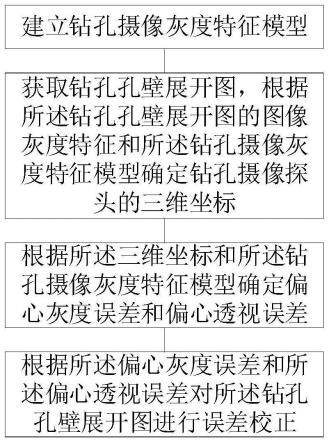
图1为本发明实施例的钻孔摄像探头误差校正方法的示意图;
[0034]
图2为本发明实施例的钻孔摄像灰度特征光学原理示意图;
[0035]
图3为本发明实施例的孔壁坐标系、探头坐标系示意图。
[0036]
附图标记说明:
[0037]
1-钻孔孔壁;2-钻孔摄像探头;3-cmos摄像头;4-led点阵光源;5-截头锥面反射镜。
具体实施方式
[0038]
为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
[0039]
如图1所示,本发明实施例提供一种钻孔摄像探头误差校正方法,包括:
[0040]
建立钻孔摄像灰度特征模型;
[0041]
获取钻孔孔壁展开图,根据所述钻孔孔壁展开图的图像灰度特征和所述钻孔摄像灰度特征模型确定钻孔摄像探头的三维坐标;
[0042]
根据所述三维坐标和所述钻孔摄像灰度特征模型确定偏心灰度误差和偏心透视误差;
[0043]
根据所述偏心灰度误差和所述偏心透视误差对所述钻孔孔壁展开图进行误差校正。
[0044]
具体地,钻孔摄像探头误差校正方法包括:
[0045]
一、建立钻孔摄像灰度特征模型:结合图2所示,在钻孔摄像系统工作时,根据光学原理,钻孔摄像探头2的孔中位置在相应深度上的钻孔图像上表现为一系列灰度特征。钻孔摄像探头在钻孔中工作时,led点阵光源4经锥面反射镜反射对钻孔孔壁1进行照明。cmos摄像头3经截头锥面反射镜5反射捕获孔壁全景图像。
[0046]
根据光学成像原理,对于cmos摄像头拍摄的钻孔内孔壁上一点,光源照射该点的几何路程s可以表示为:
[0047]
s=hs+ρcos(t)csc(t+2ψ)+h
l
[0048][0049]hl
=(r-r0)tan(ψ)
[0050]
其中,ρ为探头中心与孔壁上一点的水平距离;r为扫描线半径;h
l
为扫描线与截头锥面镜锥顶面的距离;t为参数;r0为截头锥面镜锥顶半径;hs为探头内光源与截头锥面镜端面的距离;hc为cmos摄像头光心与截头锥面镜上端面的距离,对于钻孔摄像设备有hs=hc;ψ为截头锥面镜底角。
[0051]
根据几何原理,探头光源照射钻孔孔壁光线与孔壁法线的角度表示为:
[0052][0053]
结合图3所示,以深度h=0时的钻孔轴心ob为极点,正北方向为极轴,钻孔轴线为z轴,建立柱坐标系。
[0054]
则探头中心o
p
的柱坐标为(k(h)
·
rb,θ0,h),其中,rb为钻孔孔壁半径,d
bp
(h)为钻孔孔壁轴心ob与探头轴心o
p
的距离,θ0为极轴与obo
p
的夹角。
[0055]
结合图3所示,以探头轴心o
p
为极点,正北方向为极轴,钻孔轴线为z轴,建立柱坐
标系。则探头中心与孔壁上一点的水平距离可以由下式计算:
[0056][0057]
其中,θ为孔壁上一点在探头坐标系的极角。
[0058]
光照强度简称照度,是指单位面积内接收的光通量。根据照度定律,物体被点光源照射的照度e可以由下式计算:
[0059][0060]
其中,i为光源的发光强度。
[0061]
非发光体的亮度,是指从物体表面单位面积反射出来的光通量。孔壁上一点的亮度b可以由下式计算:
[0062]
b=k
·eꢀꢀ
(5)
[0063]
其中,k为孔壁表面反射率。
[0064]
在cmos摄像头成像过程中,图像上每个像素的灰度值与物体在对应位置曝光量的关系可以表达为:
[0065]
d(i,j)=γlgh(i,j)+m
ꢀꢀ
(6)
[0066]
其中,d(i,j)为图像上一点的灰度值,h(i,j)为该点对应的曝光量,γ、m 为cmos传感器的感光特性参数。
[0067]
曝光量h与像面照度存在如下关系:
[0068]
h=e0·
t
ꢀꢀ
(7)
[0069]
其中,e0为像面照度,t为曝光时间。
[0070]
根据光学原理,对于钻孔摄像系统,像面照度与孔壁亮度的关系可以表达为:
[0071][0072]
其中,τ为镜头的透射系数,f为镜头的焦距,d为透镜的直径。
[0073]
由式(4)至(8),对于均匀钻孔孔壁,展开图上一点的灰度值d(θ,h)可由下式计算:
[0074][0075][0076]
其中,灰度参数λ的值与设备参数、扫描线半径、孔壁反射率有关。对于确定的设备参数、扫描线参数、均匀的孔壁,λ为常数。对于钻孔摄像设备, cmos摄像头的反差系数γ=1。
[0077]
以深度h=0的钻孔轴心ob为极点,正北方向为极轴,钻孔轴线为z轴,建立柱坐标系。则当钻孔摄像探头位置为(krb,θ0,h)时,对孔壁展开图上一点(θ,h),均有:
[0078][0079]
式(10)即为钻孔摄像探头三维位置图像灰度特征模型。
[0080]
二、获取钻孔孔壁展开图,根据所述钻孔孔壁展开图的图像灰度特征和所述钻孔摄像灰度特征模型确定钻孔摄像探头的三维坐标。
[0081]
①
读取钻孔孔壁展开图。
[0082]
②
对于钻孔孔壁展开图上任意一行e(i,h)的灰度值d(i,h),使用最小二乘估计法求出式中参数λ、k(h)、θ0(h)的估计量计为:
[0083][0084]
其中,为参数取时式(10)的计算值。
[0085]
③
对于一钻孔孔壁展开图e(i,j),其钻孔摄像设备参数相同、扫描线半径相同。对于岩性相似的钻孔孔壁段,其表面反射率k可以按常数处理。因此,对于钻孔孔壁展开图e(i,j),参数λ的估计量可以表示为:
[0086][0087]
④
固定参数λ的估计量后再次用最小二乘估计法求出对式(10)中参数k(h)、θ0(h)的估计量计为:
[0088][0089]
其中,为参数取时式(10)的计算值。
[0090]
求解得到探头三维坐标的估计量,记为
[0091]
三、根据所述三维坐标和所述钻孔摄像灰度特征模型确定偏心灰度误差和偏心透视误差。
[0092]
钻孔摄像系统在生成孔壁展开图时,是以探头轴线为中心进行计算的。由于探头在钻孔中的位置不是固定居中的,这种工作方式产生的孔壁展开图存在灰度误差。
[0093]
对于孔壁展开图上任意一点(θ,h),根据式(10),当钻孔摄像探头在孔中居中时,有:
[0094][0095]
则该点的灰度值为:
[0096]
d0(θ,h)=lgλ
ꢀꢀ
(15)
[0097]
其中,d0为探头居中时孔壁上一点的灰度值。
[0098]
根据钻孔摄像系统的工作原理,当钻孔摄像探头位置为(krb,θ0,h)时,由探头不居中引起的灰度误差图像b(θ,h)可以表示为:
[0099]
b(θ,h)=d(θ,h)-d0(θ,h)
ꢀꢀ
(16)
[0100]
由式(10)、(15)、(16)得:
[0101][0102]
通过式(17)即可计算钻孔孔壁展开图的灰度误差图像。由式(16)可知,将原孔壁展开图像d(θ,h)与经计算得到的误差图像b(θ,h)进行图像灰度减法运算,即可得到灰度校正后的孔壁展开图像。
[0103]
四、根据所述偏心灰度误差和所述偏心透视误差对所述钻孔孔壁展开图进行误差校正。
[0104]
钻孔摄像系统在生成孔壁展开图时以探头轴线为中心进行展开,因此当探头在钻孔中不居中时,钻孔孔壁上一点在探头坐标系的极角θ
p
与钻孔坐标系的θb之间存在误差。
[0105]
对于任意深度h,孔壁上任意一点的θ
p
与θb间存在数学关系,可表示为:
[0106][0107]
根据式(18)可以构建透视校正后的钻孔孔壁展开图e'(θb,h),表示为:
[0108]
e'(θb,h)=e(θ
p
,h)
ꢀꢀ
(19)
[0109]
通过式(19)即可计算透视校正后的钻孔孔壁展开图像。
[0110]
可选地,所述钻孔摄像灰度特征模型表示为:
[0111][0112]
其中,d(θ,h)表示所述钻孔孔壁展开图上点(θ,h)的灰度值,λ表示灰度参数,s表示点(θ,h)到光源的几何路程,rb表示钻孔孔壁半径。
[0113]
可选地,所述灰度参数与设备参数、扫描线半径和孔壁反射率相关。
[0114]
可选地,所述建立钻孔摄像灰度特征模型包括:
[0115]
根据光学原理确定任一点的曝光量;
[0116]
根据所述曝光量与摄像头的感光特性系数确定对应像素的灰度值。
[0117]
可选地,所述根据所述钻孔孔壁展开图的图像灰度特征和所述钻孔摄像灰度特征模型确定钻孔摄像探头的三维坐标包括:采用最小二乘法进行拟合确定所述钻孔摄像探头的三维坐标。
[0118]
可选地,所述偏心灰度误差表示为:
[0119][0120]
其中,b(θ,h)表示所述偏心灰度误差,s表示点(θ,h)到光源的几何路程,rb表示钻孔孔壁半径。
[0121]
可选地,所述根据所述偏心灰度误差和所述偏心透视误差对所述钻孔孔壁展开图进行误差校正包括:
[0122]
根据所述偏心灰度误差确定灰度校正后的钻孔孔壁展开图像;
[0123]
根据所述偏心透视误差确定透视校正后的钻孔孔壁展开图像。
[0124]
本发明另一实施例提供一种钻孔摄像探头误差校正装置,包括:
[0125]
建模单元,用于建立钻孔摄像灰度特征模型;
[0126]
坐标单元,用于获取钻孔孔壁展开图,根据所述钻孔孔壁展开图的图像灰度特征和所述钻孔摄像灰度特征模型确定钻孔摄像探头的三维坐标;
[0127]
误差单元,用于根据所述三维坐标和所述钻孔摄像灰度特征模型确定偏心灰度误差和偏心透视误差;
[0128]
校正单元,用于根据所述偏心灰度误差和所述偏心透视误差对所述钻孔孔壁展开图进行误差校正。
[0129]
本发明另一实施例提供一种钻孔摄像探头误差校正系统,包括存储有计算机程序的计算机可读存储介质和处理器,所述计算机程序被所述处理器读取并运行时,实现如上钻孔摄像探头误差校正方法。
[0130]
本发明另一实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器读取并运行时,实现如上钻孔摄像探头误差校正方法。
[0131]
虽然本发明公开披露如上,但本发明公开的保护范围并非仅限于此。本领域技术人员在不脱离本发明公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1