机器人模型的自动建立方法与流程
本发明涉及机器人,尤其涉及机器人的模型的建立方法。
背景技术:
1、由于机器人(例如机器手臂)的体积庞大、操作复杂且价格不斐,使用者经常会在实际生产或购买机器人前先执行3d模拟,以确保机器人符合需求,并且适用于所在工作环境。
2、一般来说,使用者必须先取得机器人的所有详细参数,并且透过特殊软件来绘制机器人的完整3d图档,藉此才能在特殊软件上看到机器人的完整外观、尺寸、作动方式以及作动范围,并且对其进行模拟操作。然而,并非所有使用者都具备3d图档的绘制能力,在此情况下,使用者将无法预先对所需的机器人进行模拟操作,相当不便。
技术实现思路
1、本发明的主要目的,在于提供一种机器人模型的自动建立方法,允许使用者仅输入部分的机器人参数,就能够透过基本几何图形自动建立出具有简易机器人外观并且可控的机器人模型。
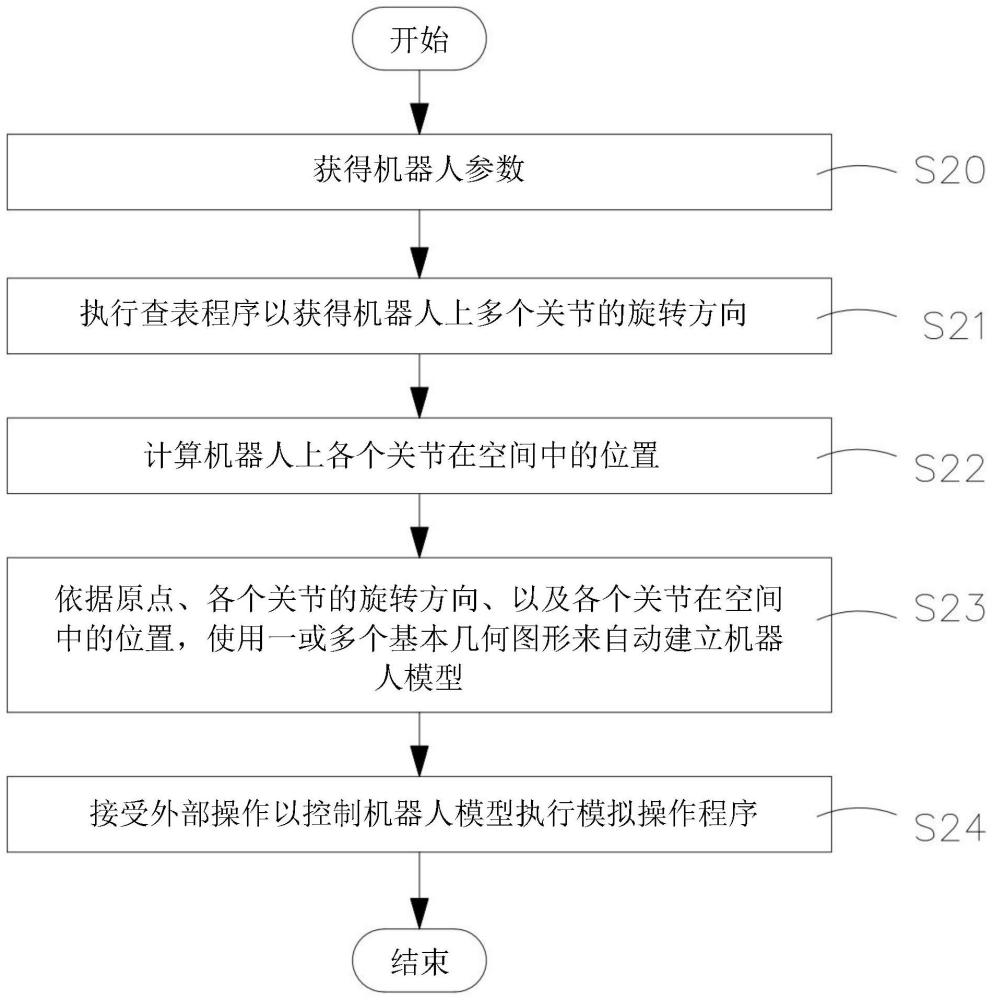
2、为了达成上述目的,本发明的机器人模型的自动建立方法包括下列步骤:
3、a)获得一机器人的多个机器人参数;
4、b)依据该多个机器人参数执行一查表程序,以获得该机器人上多个关节的旋转方向;
5、c)计算各该关节在空间中的位置;
6、d)依据一原点、各该关节的旋转方向以及各该关节在空间中的位置来使用一或多个基本几何图形自动建立一机器人模型;及
7、e)接受一外部操作以控制该机器人模型执行一模拟操作程序。
8、如上所述,其中该基本几何图形为一六面体、一三角柱、一圆柱体、一圆锥体或一圆球体。
9、如上所述,其中该多个机器人参数至少包括该机器人的一构型,并且该步骤b的该查表程序包括:
10、b1)依据该构型查询一构型查找表,以获得该构型的一连杆数量、一关节数量以及各该关节的旋转方向。
11、如上所述,其中更包括一步骤c0):该步骤b)后,获得该机器人的多个连杆的一连杆信息;
12、其中,该步骤c)包括基于该多个连杆的该连杆信息以及该多个关节执行顺向运动学计算,以依序获得各该关节于空间中的位置,并且该步骤d)包括依据该原点、各该连杆的该连杆信息、各该关节的旋转方向以及各该关节在空间中的位置来建立该机器人模型。
13、如上所述,其中该连杆信息包括一连杆长度及一连杆偏差,该旋转方向包括一关节角度及一连杆扭角,该步骤c)包括依据该连杆信息及该旋转方向执行顺向运动学计算以建立一dh表,并且该步骤d)包括基于该dh表来使用基本几何图形建立该机器人模型,其中该dh表记录该机器人的一原点坐标系串联到一末端坐标系的一转换参数。
14、如上所述,其中该关节包括一主动运动轴及一被动运动轴,其中该步骤d)包括以圆柱体表示该主动运动轴,并以圆球体表示该被动运动轴,并且以该圆柱体的一轴心方向代表该主动运动轴的该旋转方向。
15、如上所述,其中该步骤d)前更包括一步骤d0):决定该基本几何图形的一最大尺寸。
16、如上所述,其中该步骤d)包括以圆柱体表示各该连杆,并且该步骤d0)包括:
17、d01)计算所有该连杆的一最小长度;及
18、d02)基于该最小长度计算最适合该些连杆的半径或直径。
19、如上所述,其中该步骤d)包括以不同颜色显示该些关节及该些连杆。
20、如上所述,其中该步骤e)前更包括一步骤e0):获得个各该关节的一上极限及一下极限;
21、其中该步骤e)包括控制该机器人模型的各该关节于该上极限及该下极限的范围内执行该模拟操作程序。
22、如上所述,其中各该关节包括一旋转运动轴及一平移运动轴,该旋转运动轴的该上极限及该下极限为一旋转角度,该平移运动轴的该上极限及该下极限为一移动距离。
23、本发明利用基本几何图形,结合使用者输入的少量机器人参数,即可取代机器人的实际硬件元件来建构出一个简易的机器人模型,并且以此机器人模型来让使用者执行模拟操作。相较于相关技术,本发明有效降低了使用者在进行机器人的3d模拟操作时的技术门槛。
24、以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
技术特征:
1.一种机器人模型的自动建立方法,其特征在于,包括:
2.根据权利要求1所述的机器人模型的自动建立方法,其特征在于,该基本几何图形为一六面体、一三角柱、一圆柱体、一圆锥体或一圆球体。
3.根据权利要求1所述的机器人模型的自动建立方法,其特征在于,该多个机器人参数至少包括该机器人的一构型,并且该步骤b的该查表程序包括:
4.根据权利要求3所述的机器人模型的自动建立方法,其特征在于,更包括一步骤c0):该步骤b)后,获得该机器人的多个连杆的一连杆信息;
5.根据权利要求4所述的机器人模型的自动建立方法,其特征在于,该连杆信息包括一连杆长度及一连杆偏差,该旋转方向包括一关节角度及一连杆扭角,该步骤c)包括依据该连杆信息及该旋转方向执行顺向运动学计算以建立一dh表,并且该步骤d)包括基于该dh表来使用基本几何图形建立该机器人模型,其中该dh表记录该机器人的一原点坐标系串联到一末端坐标系的一转换参数。
6.根据权利要求4所述的机器人模型的自动建立方法,其特征在于,该关节包括一主动运动轴及一被动运动轴,其中该步骤d)包括以圆柱体表示该主动运动轴,并以圆球体表示该被动运动轴,并且以该圆柱体的一轴心方向代表该主动运动轴的该旋转方向。
7.根据权利要求4所述的机器人模型的自动建立方法,其特征在于,该步骤d)前更包括一步骤d0):决定该基本几何图形的一最大尺寸。
8.根据权利要求7所述的机器人模型的自动建立方法,其特征在于,该步骤d)包括以圆柱体表示各该连杆,并且该步骤d0)包括:
9.根据权利要求4所述的机器人模型的自动建立方法,其特征在于,该步骤d)包括以不同颜色显示该些关节及该些连杆。
10.根据权利要求4所述的机器人模型的自动建立方法,其特征在于,该步骤e)前更包括一步骤e0):获得个各该关节的一上极限及一下极限;
11.根据权利要求10所述的机器人模型的自动建立方法,其特征在于,各该关节包括一旋转运动轴及一平移运动轴,该旋转运动轴的该上极限及该下极限为一旋转角度,该平移运动轴的该上极限及该下极限为一移动距离。
技术总结
一种机器人模型的自动建立方法,包括下列步骤:获得多个机器人参数;依据多个机器人参数获得机器人上的多个关节的旋转方向;计算各个关节在空间中的位置;依据原点、各个关节的旋转方向以及各个关节在空间中的位置使用基本几何图形来自动建立机器人模型;及,接受外部操作以控制机器人模型执行模拟操作程序。
技术研发人员:黄申栋
受保护的技术使用者:创博股份有限公司
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!