视觉工业螺钉机器人切换工位的方法与流程
本发明涉及工业机器人,特别涉及视觉工业螺钉机器人切换工位的方法。
背景技术:
1、在机械、电子等设备制造过程中,需要对各零部件进行装配,装配的工艺流程直接影响到设备制造的效率;基于视觉定位的工业螺钉机用于生产线上家电和各类电器背板和主板螺孔的自动旋拧,大大节约了人力,但是,现有的视觉工业机器人在切换工位时,需要人工进行螺钉孔的位置确认操作,影响生产效率。
技术实现思路
1、本发明所解决的技术问题:提供一种视觉工业螺钉机器人切换工位的方法,解决现有技术中需要人工确认螺钉孔的位置的问题。
2、本发明解决上述技术问题采用的技术方案:视觉工业螺钉机器人切换工位的方法,包括以下步骤:
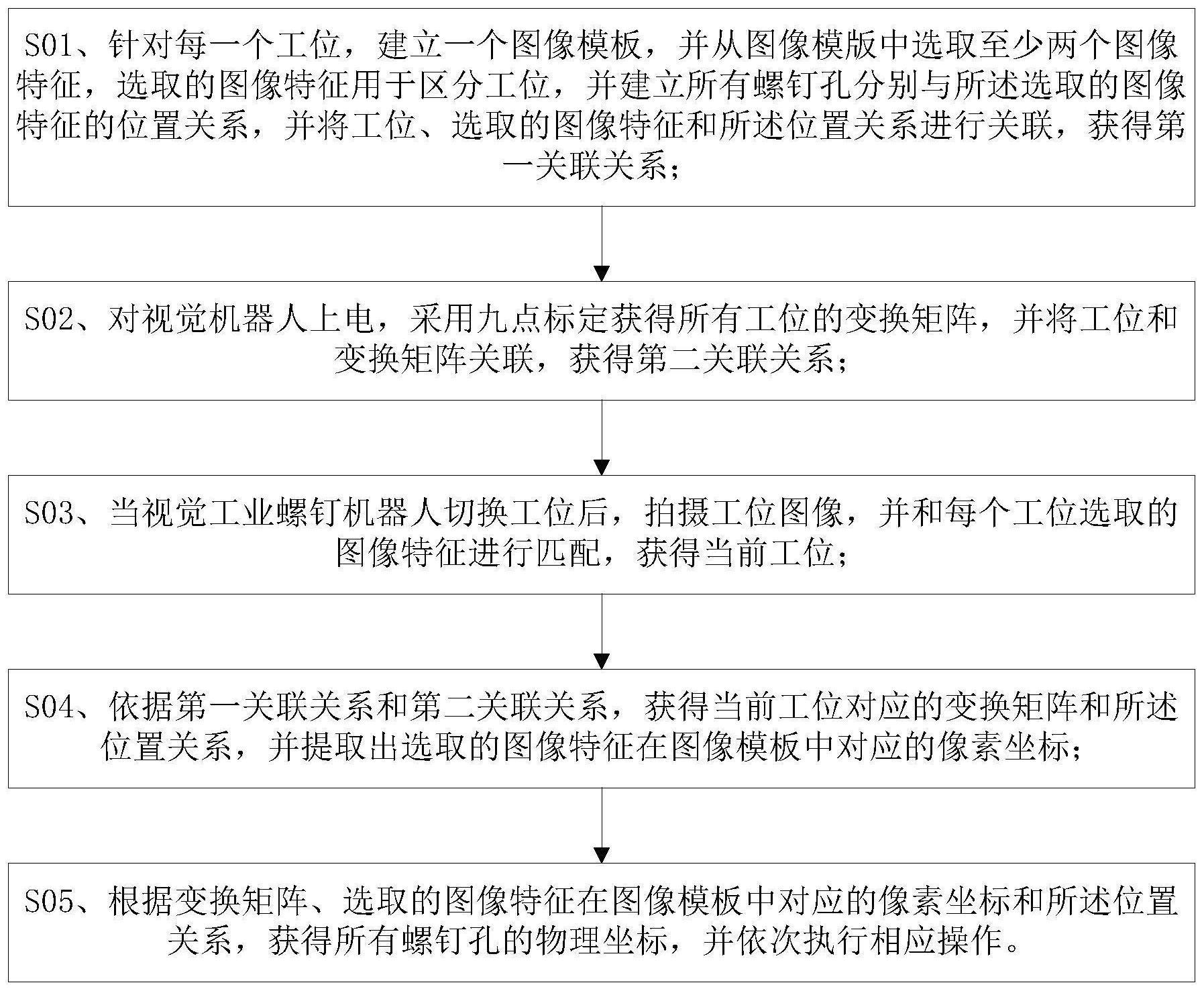
3、s01、针对每一个工位,建立一个图像模板,并从图像模版中选取至少两个图像特征,选取的图像特征用于区分工位,并建立所有螺钉孔分别与所述选取的图像特征的位置关系,并将工位、选取的图像特征和所述位置关系进行关联,获得第一关联关系;
4、s02、对视觉机器人上电,采用九点标定获得所有工位的变换矩阵,并将工位和变换矩阵关联,获得第二关联关系;
5、s03、当视觉工业螺钉机器人切换工位后,拍摄工位图像,并和每个工位选取的图像特征进行匹配,获得当前工位;
6、s04、依据第一关联关系和第二关联关系,获得当前工位对应的变换矩阵和所述位置关系,并提取出选取的图像特征在图像模板中对应的像素坐标;
7、s05、根据变换矩阵、选取的图像特征在图像模板中对应的像素坐标和所述位置关系,获得所有螺钉孔的物理坐标,并依次执行相应操作。
8、进一步的,所述螺钉孔分别与所述选取的图像特征的位置关系为螺钉孔与某一图像特征的距离以及螺钉孔、某一图像特征和另一图像特征组成的夹角,所述夹角有正负。
9、进一步的,所述图像特征在图像模板中对应的像素坐标与建立螺钉孔分别与所述两个图像特征的位置关系时采用的图像特征中的点一致。
10、进一步的,所述第一关联关系和第二关联关系存储在视觉工业螺钉机器人控制系统的数据库中。
11、本发明的有益效果:本发明视觉工业螺钉机器人切换工位的方法,通过选取工位图像模板的至少两个图像特征,并建立所有螺钉孔分别与选取的图像特征的位置关系,并将工位、选取的图像特征和所述位置关系进行关联,获得第一关联关系,利用九点标定获得所有工位的变换矩阵,将工位和变换矩阵关联,获得第二关联关系,当视觉工业螺钉机器人切换为某一工位时,通过拍摄工位图像,和每个工位选取的图像特征进行匹配,获得当前工位,并依据第一关联关系和第二关联关系,获得当前工位对应的变换矩阵和所述位置关系,提取出选取的图像特征在图像模版中对应的像素坐标,根据变换矩阵、选取的图像特征在图像模板中对应的像素坐标和所述位置关系,获得所有螺钉孔的物理坐标,并依次执行相应操作,以此完成自动切换工位,解决了现有技术中需要人工确认螺钉孔的位置的问题,本发明相比于现有技术,不需要人工确认螺钉孔的位置,可实现自动切换工位,提高了生产效率。
技术特征:
1.视觉工业螺钉机器人切换工位的方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的视觉工业螺钉机器人切换工位的方法,其特征在于,所述螺钉孔分别与所述选取的图像特征的位置关系为螺钉孔与某一图像特征的距离以及螺钉孔、某一图像特征和另一图像特征组成的夹角,所述夹角有正负。
3.根据权利要求1所述的视觉工业螺钉机器人切换工位的方法,其特征在于,所述图像特征在图像模板中对应的像素坐标与建立螺钉孔分别与所述两个图像特征的位置关系时采用的图像特征中的点一致。
4.根据权利要求1-3任一项所述的视觉工业螺钉机器人切换工位的方法,其特征在于,所述第一关联关系和第二关联关系存储在视觉工业螺钉机器人控制系统的数据库中。
技术总结
本发明视觉工业螺钉机器人切换工位的方法,涉及工业机器人技术领域,通过选取工位图像模板的至少两个图像特征,建立所有螺钉孔分别与选取的图像特征的位置关系,将工位、选取的图像特征和所述位置关系进行关联,利用九点标定获得所有工位的变换矩阵,将工位和变换矩阵关联,在切换工位后拍摄工位图像,并和每个工位选取的图像特征进行匹配,获得当前工位,依据关联关系,获得当前工位对应的变换矩阵和所述位置关系,提取出选取的图像特征的像素坐标,根据变换矩阵、选取的图像特的像素坐标和所述位置关系,获得所有螺钉孔的物理坐标,解决了现有技术中需要人工确认螺钉孔的位置的问题,本发明适用于视觉工业螺钉机器人切换工位。
技术研发人员:帅晓燕
受保护的技术使用者:四川长虹电器股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!