用于智能汽车的路面类型勘测方法、装置和相关设备
本公开涉及智能汽车环境感知,尤其涉及一种用于智能汽车的路面类型勘测方法、装置、电子设备和计算机可读存储介质。
背景技术:
1、近些年,汽车主动安全控制技术发展迅速,车辆在车辆行驶过程中,及时获得车辆所在的路面的类型可以为车辆控制的安全性、舒适性和燃油消耗的优化提供重要依据。另一方面,在高级辅助驾驶和自动驾驶领域,车辆的控制策略和行为决策也会随着路面类型的差异产生相应的变化。因此,路面类型的识别是车辆环境感知的一个重要研究方向。
2、通过调研国内外的研究现状可知,路面类型的识别的方法可以概括为两大类:基于传感器的直接测量法和基于车辆响应的间接测量法。基于传感器的直接测量法就是通过车载传感器收集路面类型的感知信息直接测量路面类型的信息。常见的用于路面类型识别的传感器包括:机器视觉、毫米波雷达、激光雷达等。基于车辆响应的间接测量法是根据车辆在不同路面行驶时的车辆响应对路面类型进行分类。
3、通过分析现有路面类型识别技术,发现存在一些不够完善的地方。首先,基于响应的路面类型识别方法只能识别车辆当前接触的路面类型,无法识别车辆前方的路面,这会降低车辆控制和决策的时效性。其次,在基于传感器测量的路面类型识别方法中,毫米波雷达和激光雷达的硬件成本较高,现阶段不适宜广泛地部署于车辆系统,而基于机器视觉的路面识别方法使用的图像特征较为单一,因此路面类型的识别精度和鲁棒性有待进一步提高。另外,大多数的路面类型识别算法没有考虑路面信息在时间和空间上的连续性,路面检测信息偶然误差将严重影响模型的识别精度。
技术实现思路
1、本公开的目的在于提供一种用于智能汽车的路面类型勘测方法、装置、电子设备以及计算机可读存储介质,可以在智能汽车进行环境感知时提高路面类型识别的识别精度。
2、本公开的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本公开的实践而习得。
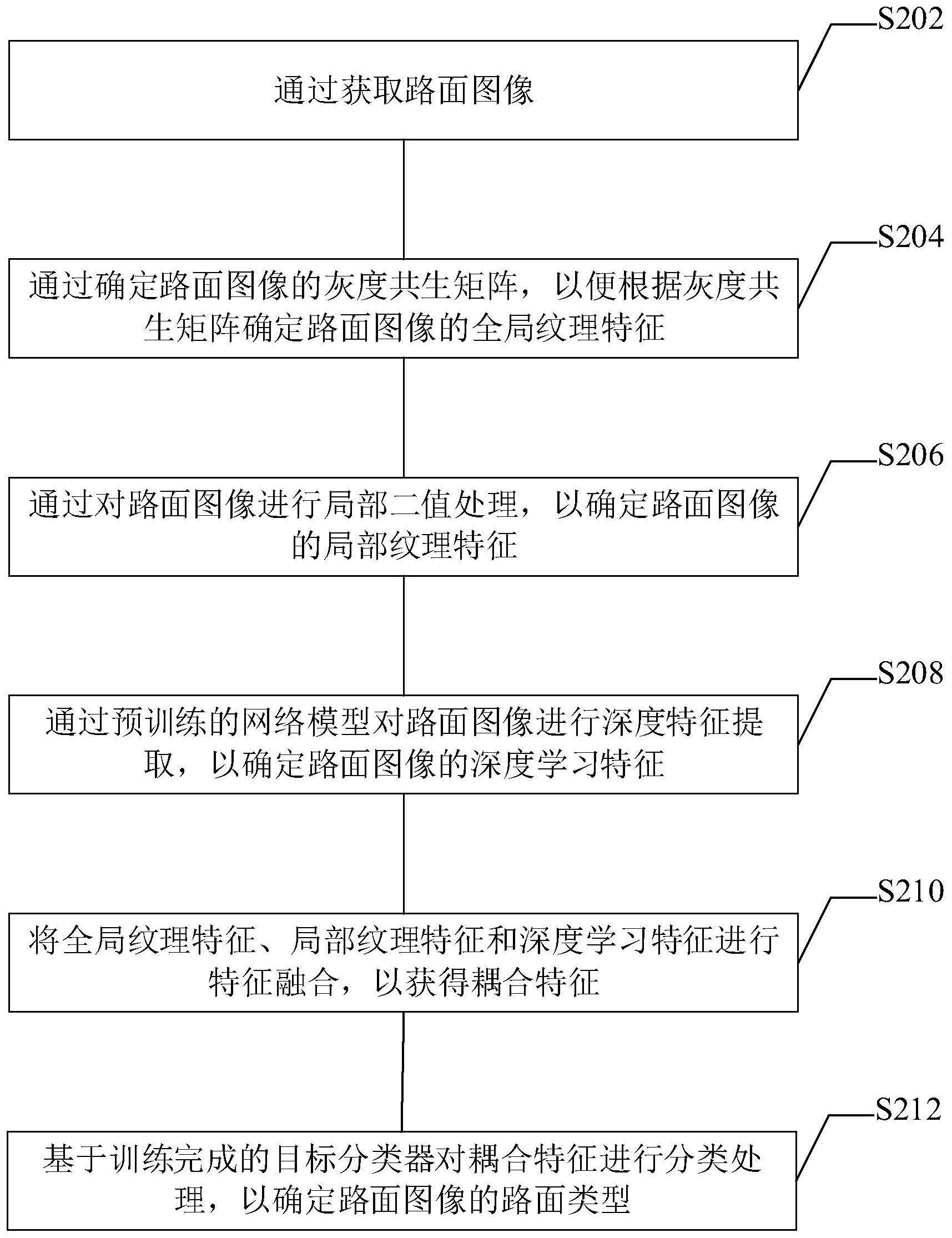
3、本公开实施例提供了一种用于智能汽车的路面类型勘测方法,包括:通过获取路面图像;通过确定所述路面图像的灰度共生矩阵,以便根据所述灰度共生矩阵确定所述路面图像的全局纹理特征;通过对所述路面图像进行局部二值处理,以确定所述路面图像的局部纹理特征;通过预训练的网络模型对所述路面图像进行深度特征提取,以确定所述路面图像的深度学习特征;将所述全局纹理特征、所述局部纹理特征和所述深度学习特征进行特征融合,以获得耦合特征;基于训练完成的目标分类器对所述耦合特征进行分类处理,以确定所述路面图像的路面类型。
4、本公开实施例提供了一种用于智能汽车的路面类型勘测装置,包括:路面图获取模块、灰度共生矩阵确定模块、局部二值处理模块、深度特征提取模块、特征融合模块和分类模块。
5、其中,所述路面图获取模块用于通过获取路面图像;所述灰度共生矩阵确定模块可以用于通过确定所述路面图像的灰度共生矩阵,以便根据所述灰度共生矩阵确定所述路面图像的全局纹理特征;所述局部二值处理模块可以用于通过对所述路面图像进行局部二值处理,以确定所述路面图像的局部纹理特征;所述深度特征提取模块可以用于通过预训练的网络模型对所述路面图像进行深度特征提取,以确定所述路面图像的深度学习特征;所述特征融合模块可以用于将所述全局纹理特征、所述局部纹理特征和所述深度学习特征进行特征融合,以获得耦合特征;所述分类模块可以用于基于训练完成的目标分类器对所述耦合特征进行分类处理,以确定所述路面图像的路面类型。
6、本公开实施例提出一种电子设备,该电子设备包括:存储器和处理器;所述存储器用于存储程序指令;所述处理器调用所述存储器存储的所述程序指令,用于实现上述任一项所述的用于智能汽车的路面类型勘测方法。
7、本公开实施例提出一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如上述任一项所述的用于智能汽车的路面类型勘测方法。
8、本公开实施例提出一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行上述用于智能汽车的路面类型勘测方法。
9、本公开实施例提供的用于智能汽车的路面类型勘测方法、装置、电子设备和计算机可读存储介质,分别采用灰度共生矩阵、局部二值处理算法从图像中提取了丰富的特征信息,然后采用先进的深度学习分类器进行训练,将路面类型的识别问题转化成时间序列的预测问题。该方法充分挖掘了路面图像的信息,多特征耦合向量融合可以有效地提高模型的识别精度,进而提高了路面类型的识别精度。最后,纯图像的路面类型识别方法可以有效地降低路面类型的识别成本。
10、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本公开。
技术特征:
1.一种用于智能汽车的路面类型勘测方法,其特征在于,包括:
2.根据权利要求1所述方法,其特征在于,确定所述路面图像的灰度共生矩阵,以便根据所述灰度共生矩阵确定所述路面图像的全局纹理特征,包括:
3.根据权利要求1所述方法,其特征在于,对所述路面图像进行局部二值处理,以确定所述路面图像的局部纹理特征,包括:
4.根据权利要求1所述方法,其特征在于,通过预训练的网络模型对所述路面图像进行特征提取,以确定所述路面图像的深度学习特征,包括:
5.根据权利要求1所述方法,其特征在于,将所述全局纹理特征、所述局部纹理特征和所述深度学习特征进行特征融合,以获得耦合特征,包括:
6.根据权利要求1所述方法,其特征在于,所述路面图像包括连续时间采集的至少一个路面图像;其中,确定所述路面图像的灰度共生矩阵,以便根据所述灰度共生矩阵确定所述路面图像的全局纹理特征,包括:
7.根据权利要求1所述方法,其特征在于,还包括:
8.一种用于智能汽车的路面类型勘测的装置,其特征在于,包括:
9.一种用于智能汽车的路面类型勘测的电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有程序指令,该程序指令被处理器执行时实现如权利要求1-7任一项所述的用于智能汽车的路面类型勘测方法。
技术总结
本公开提供一种用于智能汽车的路面类型勘测方法、装置、电子设备和可读存储介质,涉及智能汽车环境感知技术领域,上述用于智能汽车的路面类型勘测方法包括:通过获取路面图像;通过确定路面图像的灰度共生矩阵,以便根据灰度共生矩阵确定路面图像的全局纹理特征;通过对路面图像进行局部二值处理,以确定路面图像的局部纹理特征;通过预训练的网络模型对路面图像进行深度特征提取,以确定路面图像的深度学习特征;将全局纹理特征、局部纹理特征和深度学习特征进行特征融合,以获得耦合特征;基于训练完成的目标分类器对耦合特征进行分类处理,以确定路面图像的路面类型。本公开实施例可以在智能汽车进行环境感知时提高路面类型识别的识别精度。
技术研发人员:孙宁,许男
受保护的技术使用者:吉林大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!