一种针对高机动跨域目标的协同探测跟踪星座设计方法与流程
本发明属于航天器体系总体设计领域,特别涉及一种针对高机动跨域目标的协同探测跟踪星座设计方法。
背景技术:
1、遥感卫星在不同轨道上具备的能力特点,可以用来探测目标在不同阶段的特征。对于高机动跨域目标全程跟踪任务,高轨探测卫星通过对主动段高温尾焰的探测实现对发射的早期探测跟踪,并且通过对主动段飞行过程的跟踪完成目标轨道参数估计;低轨遥感卫星利用临边或深空背景,对中段辐射强度低的冷目标进行持续跟踪,完成精密轨道确定。
2、传统探测星座设计方法考虑因素主要包括覆盖性和链路通信。高轨卫星部署于地球同步轨道观测地表,低轨星座部署于2000km以下的低轨观测深空。高轨卫星的数量与构型设计需满足对地表的覆盖性需求,低轨卫星的数量与构型设计需满足对空的覆盖性需求。同时,高轨和低轨卫星也分别满足各自观测范围内的时间链、精度链需求。但目前高轨星座和低轨星座是分开进行设计的,没有以时间链、精度链闭合为目标优化高轨-低轨星座整体数量与构型。
技术实现思路
1、有鉴于此,本发明提供了一种针对高机动跨域目标的协同探测跟踪星座设计方法,解决了面向时间链、精度链闭合要求的遥感星座设计问题,包括:
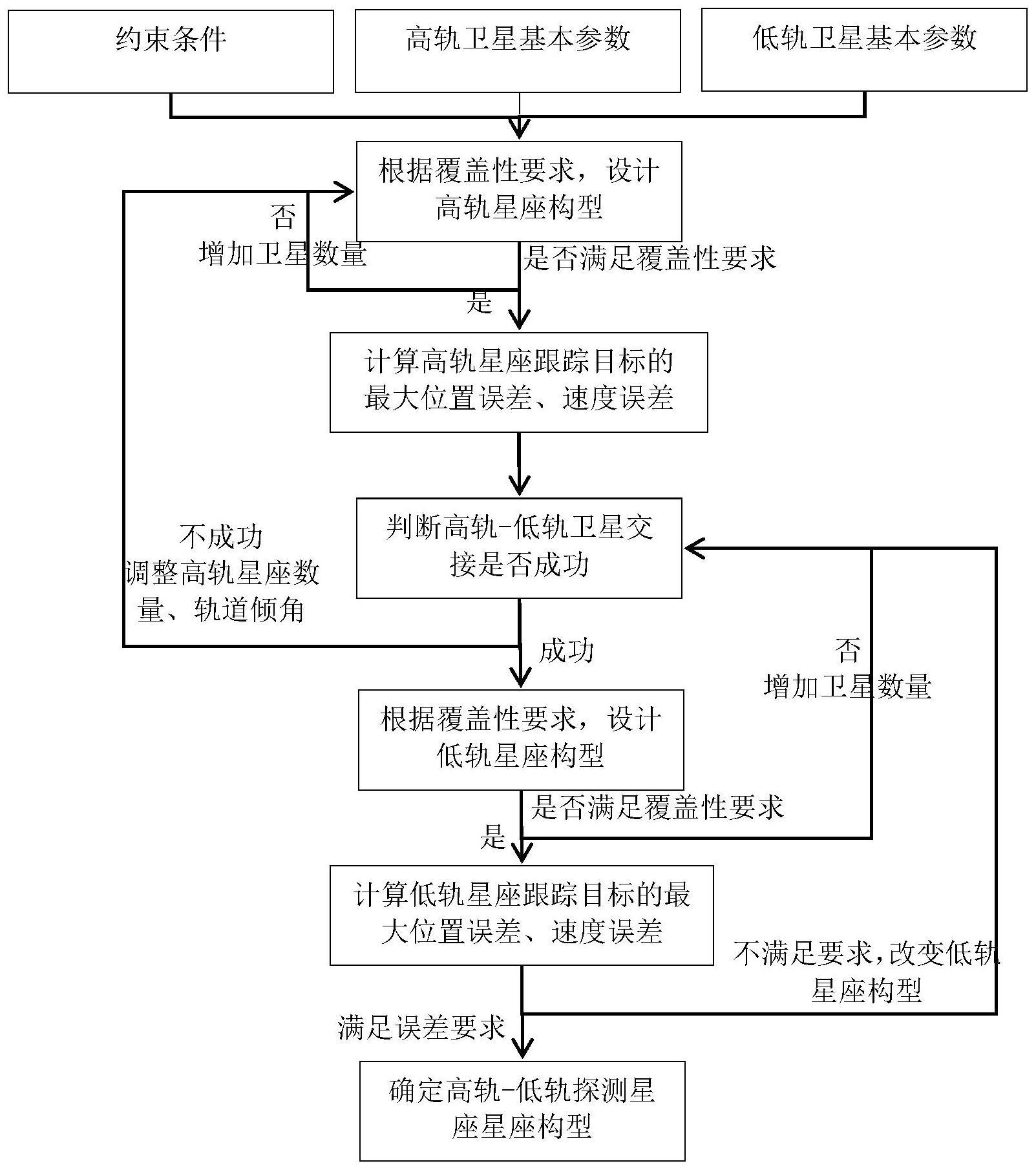
2、步骤s1,确定高轨星座构型,初始化并确定高轨卫星数量;
3、步骤s2,计算所述高轨卫星的二重覆盖百分比与轨道倾角的关系曲线之间的关系曲线,选择覆盖性能最优对应的所述轨道倾角;
4、步骤s3,随机生成多个高机动跨域目标,计算高轨星座跟踪目标的最大位置误差、速度误差;
5、步骤s4,根据低轨卫星探测器视场大小,判断低轨卫星交接是否成功;
6、步骤s5,确定高轨星座构型,初始化并确定低轨卫星数量;
7、步骤s6,根据所述高机动跨域目标,统一设置初始跟踪误差,计算低轨星座跟踪目标的最大位置误差、速度误差;
8、步骤s7,判断低轨星座跟踪目标的最大位置误差、速度误差是否满足指标要求,若不满足要求,重复执行所述步骤s1,调整高轨、低轨卫星数量、构型,直至满足指标要求;
9、步骤s8,当所述指标要求满足要求,确定最终构型,完成高机动跨域目标协同探测跟踪星座设计。
10、特别地,所述步骤s1具体包括:确定高轨星座构型,初始化高轨卫星数量后,逐步增加卫星数量,根据目标起始点观测范围一重覆盖百分比p1和双重覆盖百分比p2、探测距离dg、高轨卫星对地载荷探测器视场a1,通过仿真计算覆盖性能满足一重覆盖百分比p1和双重覆盖百分比p2的最小卫星数量。
11、特别地,所述步骤s3具体包括:利用蒙特卡洛方法,在起始点观测范围随机生成nd个高机动跨域目标;通过卡尔曼滤波仿真,计算所述高轨星座跟踪单一目标,持续观测时长tg秒后的位置误差er和速度误差ev;统计nd个高机动跨域目标中最大的位置误差er_max和速度误差ev_max。
12、特别地,所述步骤s4具体包括:在交接时,假设高速机动目标的速度误差在前tj秒内几乎不扩散;若高轨星座给低轨星座任意一颗卫星的初始引导位置和速度误差为er_max,ev_max,则tj秒后误差椭球半径为er_max+tj×ev_max,此时低轨卫星的探测距离约为dd;若对空载荷视场为c°×c°,根据如下不等式:
13、
14、若上述不等式成立,则交接成功。
15、特别地,所述步骤s5具体包括:确定低轨星座构型,初始化低轨卫星数量后,逐步增加卫星数量,变换不同构型;根据目标起始点观测范围一重覆盖百分比p1和双重覆盖百分比p2、探测距离dd,通过仿真计算覆盖性能满足一重覆盖百分比p1和双重覆盖百分比p2的最小卫星数量。
16、特别地,所述步骤s6具体包括:根据所述nd个高机动跨域目标,统一设置初始跟踪误差为er_max、ev_max;通过卡尔曼滤波仿真,计算低轨星座跟踪单一目标,持续观测时长td秒后的位置误差edr和速度误差edv。统计nd个高机动跨域目标中最大的位置误差edr_max和速度误差edv_max。
17、有益效果:
18、1)通过发明公开的一种针对高机动跨域目标的协同探测跟踪星座设计方法,解决了面向时间链、精度链闭合要求的遥感星座设计问题,突破了传统遥感星座设计以覆盖性等指标为主要优化目标的设计思路;
19、2)通过本发明中确定高轨、低轨卫星数量以及轨道参数,优化了高轨卫星、低轨卫星数量以及轨道参数,星座设计结果使用满足时间链、精度链闭合的最小卫星数量,降低星座成本;
20、3)通过本发明中利用蒙特卡洛方法,在起始点观测范围随机生成高机动跨域目标,保证了观测范围的随机性;通过卡尔曼滤波仿真,计算所述高轨星座跟踪单一目标,是以均方误差最小为准则的最佳线性滤波问题;
21、4)本发明充分考虑了高轨星座给低轨星座任意一颗卫星的初始引导位置和速度误差,对交接是否成功进行了更准确的估计。
技术特征:
1.一种针对高机动跨域目标的协同探测跟踪星座设计方法,其特征在于,包括:
2.如权利要求1所述的针对高机动跨域目标的协同探测跟踪星座设计方法,其特征在于,所述步骤s1具体包括:确定高轨星座构型,初始化高轨卫星数量后,逐步增加卫星数量,根据目标起始点观测范围一重覆盖百分比p1和双重覆盖百分比p2、探测距离dg、高轨卫星对地载荷探测器视场a1,通过仿真计算覆盖性能满足一重覆盖百分比p1和双重覆盖百分比p2的最小卫星数量。
3.如权利要求1-2任意一项所述的针对高机动跨域目标的协同探测跟踪星座设计方法,其特征在于,所述步骤s3具体包括:利用蒙特卡洛方法,在起始点观测范围随机生成nd个高机动跨域目标;通过卡尔曼滤波仿真,计算所述高轨星座跟踪单一目标,持续观测时长tg秒后的位置误差er和速度误差ev;统计nd个高机动跨域目标中最大的位置误差er_max和速度误差ev_max。
4.如权利要求1所述的针对高机动跨域目标的协同探测跟踪星座设计方法,其特征在于,所述步骤s4具体包括:在交接时,假设高速机动目标的速度误差在前tj秒内几乎不扩散;若高轨星座给低轨星座任意一颗卫星的初始引导位置和速度误差为er_max,ev_max则tj秒后误差椭球半径为er_max+tj×ev_max,此时低轨卫星的探测距离约为dd;若对空载荷视场为c°×c°,根据如下不等式:
5.如权利要求1所述的针对高机动跨域目标的协同探测跟踪星座设计方法,其特征在于,所述步骤s5具体包括:确定低轨星座构型,初始化低轨卫星数量后,逐步增加卫星数量,变换不同构型;根据目标起始点观测范围一重覆盖百分比p1和双重覆盖百分比p2、探测距离dd,通过仿真计算覆盖性能满足一重覆盖百分比p1和双重覆盖百分比p2的最小卫星数量。
6.如权利要求1所述的针对高机动跨域目标的协同探测跟踪星座设计方法,其特征在于,所述步骤s6具体包括:根据所述nd个高机动跨域目标,统一设置初始跟踪误差为er_max、ev_max;通过卡尔曼滤波仿真,计算低轨星座跟踪单一目标,持续观测时长td秒后的位置误差edr和速度误差edv。统计nd个高机动跨域目标中最大的位置误差edr_max和速度误差edv_max。
技术总结
本发明提出一种针对高机动跨域目标的协同探测跟踪星座设计方法,包括:确定高轨星座构型,初始化并确定高轨卫星数量;计算所述高轨卫星的二重覆盖百分比与轨道倾角的关系曲线之间的关系曲线,选择覆盖性能最优对应的所述轨道倾角;随机生成多个高机动跨域目标,计算高轨星座跟踪目标的最大位置误差、速度误差;根据低轨卫星探测器视场大小,判断低轨卫星交接是否成功;确定高轨星座构型,初始化并确定低轨卫星数量;根据所述高机动跨域目标,统一设置初始跟踪误差,计算低轨星座跟踪目标的最大位置误差、速度误差;判断低轨星座跟踪目标的最大位置误差、速度误差是否满足指标要求,若不满足要求,重复执行本方法直至满足指标要求。
技术研发人员:李劲东,刘宇鑫,王宇飞,田景峰,田志新
受保护的技术使用者:中国空间技术研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!