一种空间失控翻滚目标安全区域的分析方法
本发明属于航空航天领域,尤其涉及一种空间失控翻滚目标安全区域的分析方法。
背景技术:
1、人类航天技术高速发展催生了大批航天任务,在轨遗留的太空垃圾数目也与日俱增,严重威胁着空间环境与在轨航天器的安全,探寻系统地清除太空轨道中的失控目标的方法势在必行。失控空间目标基本不具备姿态调整能力,在空间摄动力影响下会出现翻滚运动,因此必须在抓捕前对其进行消旋。现有的接触式或非接触式消旋方法均需机动到失控空间目标的极近距离处才能发挥较为理想的效果,在此过程中避免服务星与失控空间目标发生碰撞至关重要。
2、为避免逼近及消旋过程中与失控翻滚目标发生碰撞,必须划定失控翻滚目标的安全区域。目前常用的安全区域划分方法有椭球形安全区域和安全走廊法,其中椭球形安全区域便于考虑不确定度的影响,在远距离避障时效果较好,但近距离机动时因为没有考虑失控翻滚目标的复杂形状,无法起到理想的避障效果;安全走廊法适用于对接任务,但接触式与非接触式消旋方法在以失控翻滚目标的角速度为轴线的锥形安全走廊内均不便实施,难以起到理想的消旋效果。
技术实现思路
1、本发明的目的是提供一种空间失控翻滚目标安全区域的分析方法,以解决失控翻滚目标极近距离逼近过程中,安全区域没有考虑失控翻滚目标时变运动、划分不够精确的问题。
2、本发明采用以下技术方案:一种空间失控翻滚目标安全区域的分析方法,由以下步骤组成:
3、步骤s1:测量失控翻滚目标的角速度并构建角速度坐标系,根据已知失控翻滚目标在本体坐标系下的原始点云数据及测量的角速度,以建立失控翻滚目标的本体坐标系到角速度坐标系的旋转矩阵,并得到失控翻滚目标在角速度坐标系下的角速度点云数据,
4、步骤s2:将角速度点云数据中的各点绕角速度轴旋转一随机角度,以得到失控翻滚目标的稀疏章动区域点云数据,
5、步骤s3:将稀疏章动区域点云数据绕角速度轴旋转并叠加得到叠加点云数据,并对叠加点云数据进行均匀化处理得到均匀章动区域点云数据,
6、步骤s4:利用均匀章动区域点云数据进行混合高斯建模,并利用对数似然函数评价拟合效果,
7、步骤s5:通过最大期望算法不断提高对数似然函数的下界直到满足迭代终止条件,且取末次迭代参数值作为模型参数,得到失控翻滚目标的混合高斯模型,
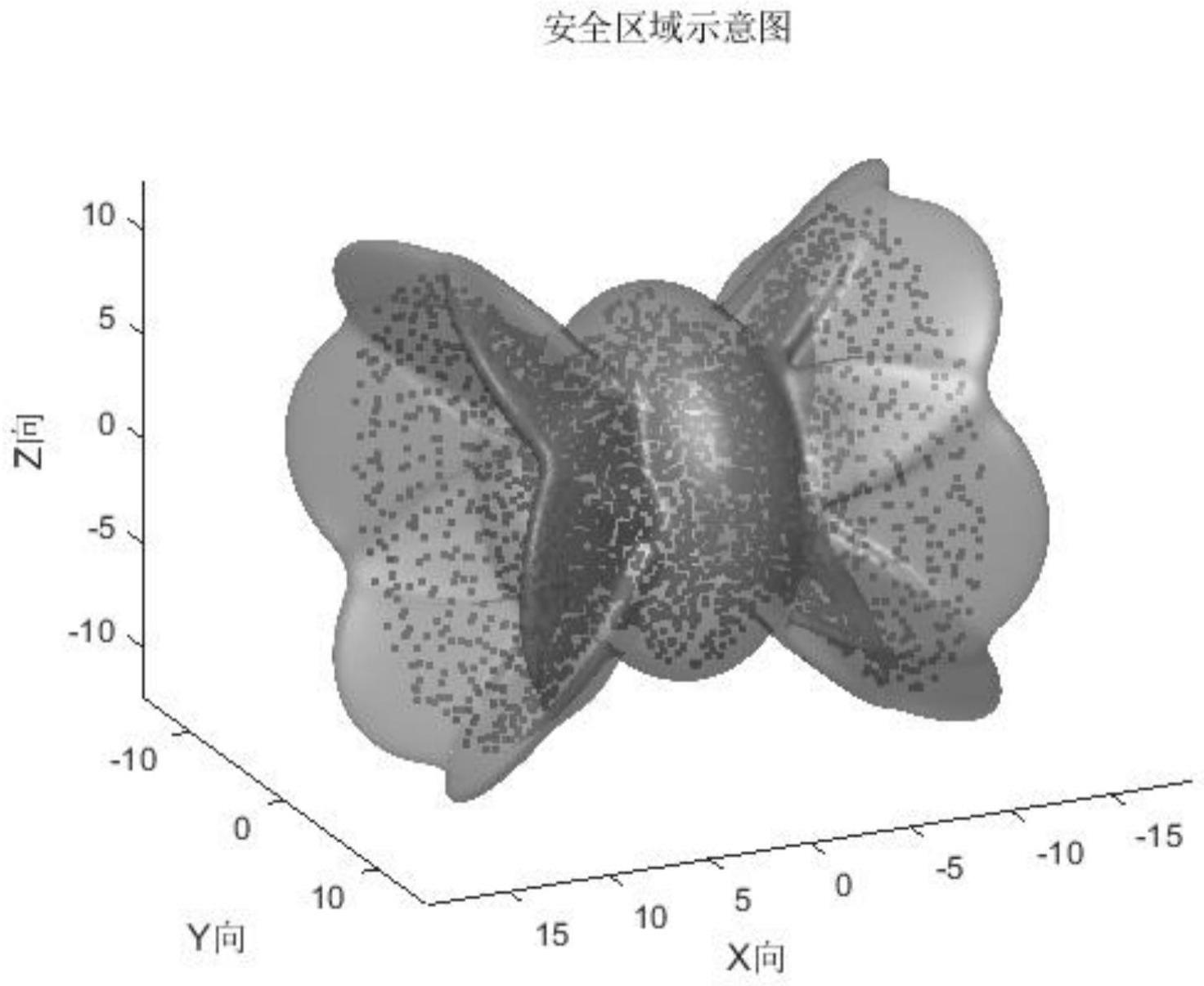
8、步骤s6:通过混合高斯模型得到失控翻滚目标的安全区域。
9、进一步地,步骤s1中所述角速度点云数据与原始点云数据之间的偏转角等于失控翻滚目标的章动角。
10、进一步地,所述混合高斯模型的概率密度函数为:
11、
12、式中,k为选定高斯分量数目,θ={θk=(πk,μk,σk),k=1,2,…k}表示混合高斯模型的参数集,πk为第k个高斯分量的权重,μk为第k个高斯分量的均值,σk为第k个高斯分量的协方差,n(x|μk,σk)表示均值为μk、协方差为σk的高斯分布在坐标点x处的概率密度。
13、进一步地,步骤s6中所述安全区域的包络面为:
14、p(x|θ)=pmax
15、其中,
16、进一步地,步骤s3中均匀化处理具体由以下步骤组成:
17、步骤s301:
18、根据各点与原点距离对叠加点云数据从大到小进行排序,
19、步骤s302:
20、判断任意两点与原点距离是否满足r(j)-r(i)<c,其中c为期望的点云间距,r(j)表示第j个点到原点的距离,r(i)表示第i个点到原点的距离,
21、步骤s303:
22、当r(j)-r(i)≥c时,外循环值i+1,内循环值j=i+1,返回步骤s302,
23、当r(j)-r(i)<c时,判断该任意两点间距离是否满足||s(j)-s(i)||2<c,其中s(i)表示第i个点的坐标,s(j)表示第j个点的坐标,
24、步骤s304:
25、当||s(j)-s(i)||2<c时,从叠加点云数据中删除s(j)点,否则内循环值j+1并返回步骤s302,不断循环直至外循环值i≥n,n为点云数目。
26、本发明的有益效果是:
27、1、本发明获取失控翻滚目标的原始点云数据,并经过处理得到稀疏章动区域点云数据,然后经过均匀化处理得到均匀章动区域点云数据,再对均匀章动区域点云数据进行混合高斯建模,并确定临界概率密度值,则所得混合高斯模型的等势面可作为失控翻滚目标安全区域的包络面;
28、2、本发明考虑了失控翻滚目标的时变运动,并通过混合高斯模型来刻画失控翻滚目标的安全区域,大大提升了安全区域的划分精度,有利于失控翻滚目标的极近距离逼近的实施;
29、3、本发明将失控翻滚目标的章动区域作为安全区域,考虑了失控翻滚目标的时变运动,在失控翻滚目标的章动角变化较为缓慢时能够保证消旋过程的安全性;
30、4、本发明使用混合高斯模型的概率密度等势面作为安全区域的包络面,利用混合高斯模型出色的拟合能力大大提升了安全区域划分的精度,能够满足需要极近距离逼近空间失控翻滚目标的消旋等任务的要求;
31、5、本发明提出的方法兼具碰撞概率评估法的优点,能根据混合高斯模型概率密度值比较各点的安全性,也便于定义避障控制力、规划最优轨迹;
32、6、本发明的均匀化算法,先通过各点距原点的距离进行分类再剔除距离过近的点,减少了算法计算量,使得章动角变化时能够及时对章动区域进行更新,满足任务的实时性要求。
技术特征:
1.一种空间失控翻滚目标安全区域的分析方法,其特征在于,由以下步骤组成:
2.根据权利要求1所述的一种空间失控翻滚目标安全区域的分析方法,其特征在于,步骤s1中所述角速度点云数据与原始点云数据之间的偏转角等于失控翻滚目标的章动角。
3.根据权利要求2所述的一种空间失控翻滚目标安全区域的分析方法,其特征在于,所述混合高斯模型的概率密度函数为:
4.根据权利要求3所述的一种空间失控翻滚目标安全区域的分析方法,其特征在于,步骤s6中所述安全区域的包络面为:
5.根据权利要求1-4任一所述的一种空间失控翻滚目标安全区域的分析方法,其特征在于,步骤s3中均匀化处理具体由以下步骤组成:
技术总结
本发明公开了一种空间失控翻滚目标安全区域的分析方法,由以下步骤组成:步骤S1:测量失控翻滚目标的角速度并构建角速度坐标系,得到失控翻滚目标在角速度坐标系下的角速度点云数据,步骤S2:得到失控翻滚目标的稀疏章动区域点云数据,步骤S3:得到叠加点云数据,并对叠加点云数据进行均匀化处理得到均匀章动区域点云数据,步骤S4:利用均匀章动区域点云数据进行混合高斯建模,步骤S5:得到失控翻滚目标的混合高斯模型,步骤S6:通过混合高斯模型得到失控翻滚目标的安全区域;本发明考虑了失控翻滚目标的时变运动,并通过混合高斯模型来刻画失控翻滚目标的安全区域,大大提升了安全区域的划分精度,有利于失控翻滚目标的极近距离逼近的实施。
技术研发人员:黄攀峰,廖腾,董刚奇,刘习尧
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!