一种基于多项式求根的阵列导向矢量估计方法与流程
本发明涉及阵列信号处理领域。更具体地,涉及一种基于多项式求根的阵列导向矢量估计方法。
背景技术:
1、自适应波束形成技术广泛应用于航空、航天、雷达和通信系统,通过在目标方向形成增益、干扰方向形成零陷,提高输出信干噪比。但是,实际工作环境中存在阵元位置误差、通道幅度相位误差等,致使目标导向矢量约束存在偏差。理论研究表明,当目标导向矢量存在约束偏差,在低信噪比(signal to noise ratio,snr)情况下,可能出现主瓣偏移等问题,降低输出sinr;在高snr情况下,若接收数据含有目标,甚至会出现信号‘自消’现象,导致输出sinr急剧恶化。
2、针对多种误差下自适应波束形成最优权求解问题,典型的解决方法有:对角加载类方法,子空间类算法,约束优化类方法,干扰协方差矩阵重构类方法等,其中:
3、对角加载类方法:该方法在样本数据协方差矩阵的对角元素中加载一个较小的量,从而减小采样协方差矩阵中噪声特征值的扰动程度,可以减缓信号‘自消’现象;但存在加载值难以控制的缺点。
4、子空间类算法:该方法将目标导向矢量向信号干扰子空间投影,从而削弱噪声子空间的扰动对波束形成算法性能的影响,在高snr的场景有较好的性能;但存在信号干扰子空间维数估计难,低snr性能差的问题。
5、约束优化类方法:该方法基于snr最大或者sinr最大来建立目标导向矢量的优化方程,从而提高对目标导向矢量的约束效果,在导向矢量误差较小时具有良好的性能;但是约束优化类方法一般计算复杂度较高。
6、干扰协方差矩阵重构类方法:该方法在干扰区域利用如capon功率谱、pi谱、spice谱进行积分,估计出不含目标的干扰协方差矩阵来提高波束形成器性能,克服了信号‘自消’现象;但是该方法在阵列结构误差下干扰抑制性能很差。
7、上述提及到的对角加载类方法能提高小快拍下的性能,但是在强目标下存在目标‘自消’现象;子空间类方法可以提高强目标下导向矢量的估计性能,但是在弱目标下存在较大误差;已有约束优化类方法由于存在目标导向矢量约束偏差,导致性能提升有限;干扰协方差矩阵重构类方法在阵列精确校准情况下,可以显著提高自适应波束形成器性能,但是在阵列校准误差下,失去干扰抑制能力。
技术实现思路
1、本发明的一个目的在于提供一种基于多项式求根的阵列导向矢量估计方法,用于存在波达角和阵列校准误差下的自适应波束形成,解决导向矢量失配引起的输出sinr下降问题。
2、为达到上述目的,本发明采用下述技术方案:
3、一种基于多项式求根的阵列导向矢量估计方法,包括:
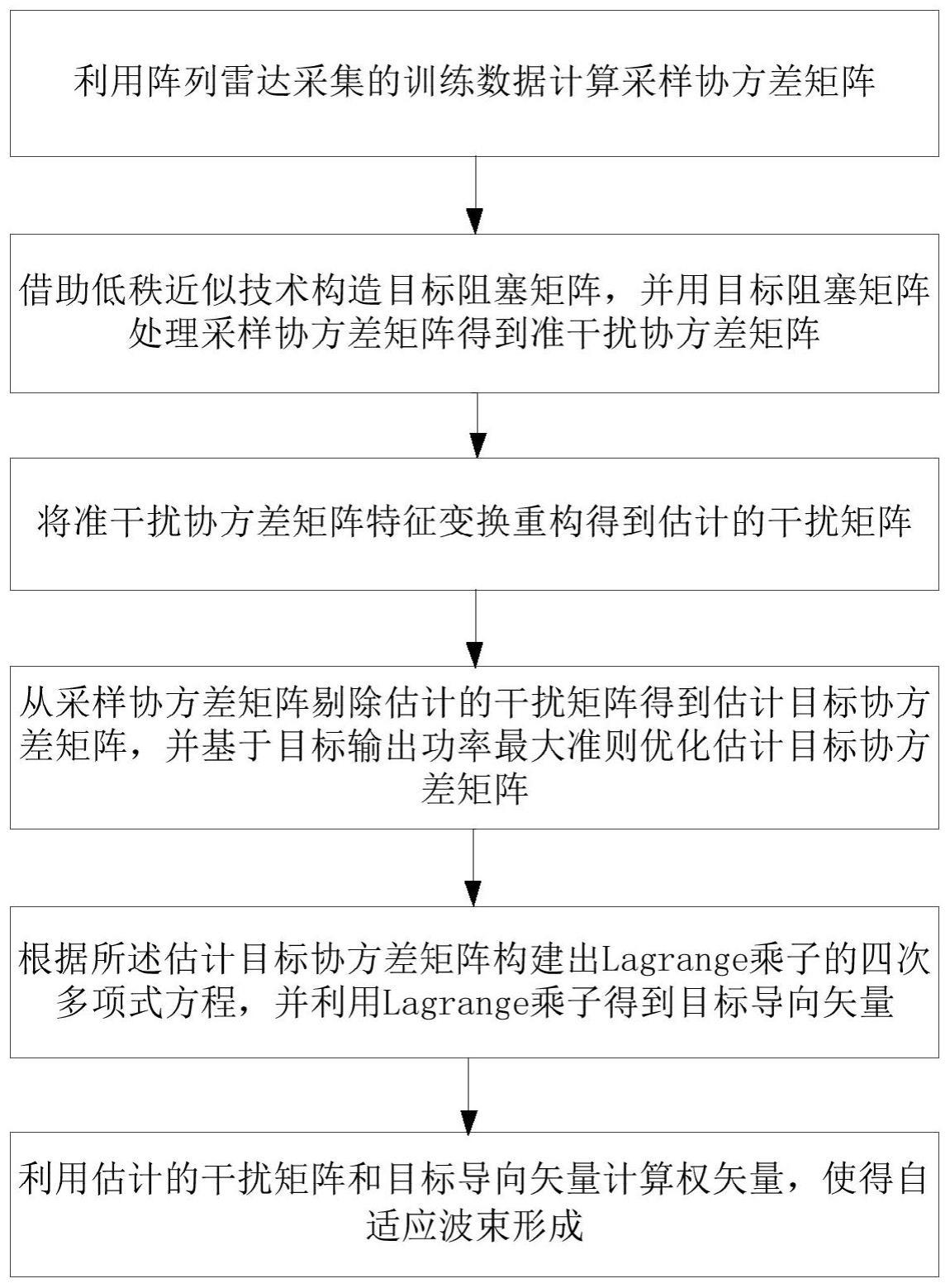
4、利用阵列雷达采集的训练数据计算采样协方差矩阵;
5、借助低秩近似技术构造目标阻塞矩阵,并用目标阻塞矩阵处理采样协方差矩阵得到准干扰协方差矩阵;
6、将准干扰协方差矩阵特征变换重构得到估计的干扰矩阵;
7、从采样协方差矩阵剔除估计的干扰矩阵得到估计目标协方差矩阵,并基于目标输出功率最大准则优化估计目标协方差矩阵;
8、根据所述估计目标协方差矩阵构建出lagrange乘子的四次多项式方程,并利用lagrange乘子得到目标导向矢量;
9、利用估计的干扰矩阵和目标导向矢量计算权矢量,使得自适应波束形成。
10、优选地,所述目标阻塞矩阵b:
11、
12、其中s和u分别表示正定矩阵特征分解得到的前l个大特征值组成的特征值矩阵和对应的特征向量矩阵,trace(·)表示矩阵求迹,(·)h代表共轭转置,a(θ)表示角度θ对应的阵列导向矢量,i代表单位矩阵,为利用最小特征值估计的噪声功率,为采样协方差矩阵。
13、优选地,所述得到准干扰协方差矩阵
14、
15、优选地,所述估计的干扰矩阵
16、
17、其中,sj和uj分别表示特征分解得到的前j个大特征值组成的特征值矩阵和对应的特征向量矩阵。
18、优选地,所述估计目标协方差矩阵
19、
20、优选地,所述构建的lagrange乘子的四次多项式方程为:
21、
22、其中,ε为不确定集半径,为的平方,κ为目标协方差矩阵的最大特征值,为投影向量,为目标导向矢量。
23、优选地,所述得到目标导向矢量包括:
24、定义e=ε-m,利用多项式求根公式计算lagrange乘子的解,得到唯一的lagrange乘子为λ=λi>0,i∈{1,2,3,4}。
25、优选地,所述利用lagrange乘子法得到的目标导向矢量
26、
27、优选地,所述最优权矢量w:
28、
29、优选地,所述利用阵列雷达采集的训练数据计算采样协方差矩阵包括:
30、利用m个阵元半波长排布的均匀线阵采集数据x(t)计算采样协方差矩阵
31、
32、其中k表示快拍数,x(t)为采集的训练数据,含有1个目标和j个干扰的回波信息,t为采集时刻,xh(t)为x(t)的共轭转置,m为常数,j为常数。
33、本发明的有益效果如下:
34、本发明公开的基于多项式求根的阵列导向矢量估计方法,解决了自适应波束形成技术中目标导向矢量失配引起的输出信号干噪比下降问题。本发明对于波达角和阵列校准误差都具有较好的稳健性,且能适用于实时性要求较高的场景。
技术特征:
1.一种基于多项式求根的阵列导向矢量估计方法,其特征在于,包括:
2.根据权利要求1所述的基于多项式求根的阵列导向矢量估计方法,其特征在于,所述目标阻塞矩阵b:
3.根据权利要求2所述的基于多项式求根的阵列导向矢量估计方法,其特征在于,
4.根据权利要求3所述的基于多项式求根的阵列导向矢量估计方法,其特征在于,所述估计的干扰矩阵
5.根据权利要求4所述的基于多项式求根的阵列导向矢量估计方法,其特征在于,
6.根据权利要求5所述的基于多项式求根的阵列导向矢量估计方法,其特征在于,
7.根据权利要求6所述的基于多项式求根的阵列导向矢量估计方法,其特征在于,所述得到目标导向矢量包括:
8.根据权利要求7所述的基于多项式求根的阵列导向矢量估计方法,其特征在于,所述利用lagrange乘子法得到的目标导向矢量
9.根据权利要求8所述的基于多项式求根的阵列导向矢量估计方法,其特征在于,所述最优权矢量w:
10.根据权利要求2所述的基于多项式求根的阵列导向矢量估计方法,其特征在于,所述利用阵列雷达采集的训练数据计算采样协方差矩阵包括:
技术总结
本发明公开一种基于多项式求根的阵列导向矢量估计方法,包括:利用阵列雷达采集的训练数据计算采样协方差矩阵;借助低秩近似技术构造目标阻塞矩阵,并用目标阻塞矩阵处理采样协方差矩阵得到准干扰协方差矩阵;将准干扰协方差矩阵特征变换重构得到估计的干扰矩阵;从采样协方差矩阵剔除估计的干扰矩阵得到估计目标协方差矩阵,并基于目标输出功率最大准则优化估计目标协方差矩阵;根据所述估计目标协方差矩阵构建出Lagrange乘子的四次多项式方程,并利用Lagrange乘子得到目标导向矢量;利用估计的干扰矩阵和目标导向矢量计算权矢量,使得自适应波束形成。本发明解决了自适应波束形成技术中目标导向矢量失配引起的输出信号干噪比下降问题。
技术研发人员:张攀,靖岗,马腾
受保护的技术使用者:北京无线电测量研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!