焊缝检测方法、装置、电子设备及存储介质与流程
本申请涉及焊接,特别涉及一种焊缝检测方法、装置、电子设备及存储介质。
背景技术:
1、目前,传统工业的示教型焊接机器人的焊接技术受影响的因素较多,并不能很好的完成高精度的焊接任务,最近研制出的一种自动焊接机器人在焊接技术方面比示教型焊接机器人有了明显的提高,但是其焊缝检测的方法仍有不足之处,导致焊缝检测的准确度不高,效率低。
2、在相关技术中,存在基于焊缝图像对焊缝区域进行检测的方法,利用基于边缘提取的中心线提取方案对采集的焊缝图像进行处理,以达到检测焊缝区域的目的,但是焊缝检测的准确度依然不高,效率低下。
技术实现思路
1、本申请提供一种焊缝检测方法、装置、电子设备及存储介质,以解决相关技术中基于整个图像进行焊缝检测,检测效率较低,且容易受到焊缝区域以外信息的干扰,大大降低焊缝检测准确性等问题。
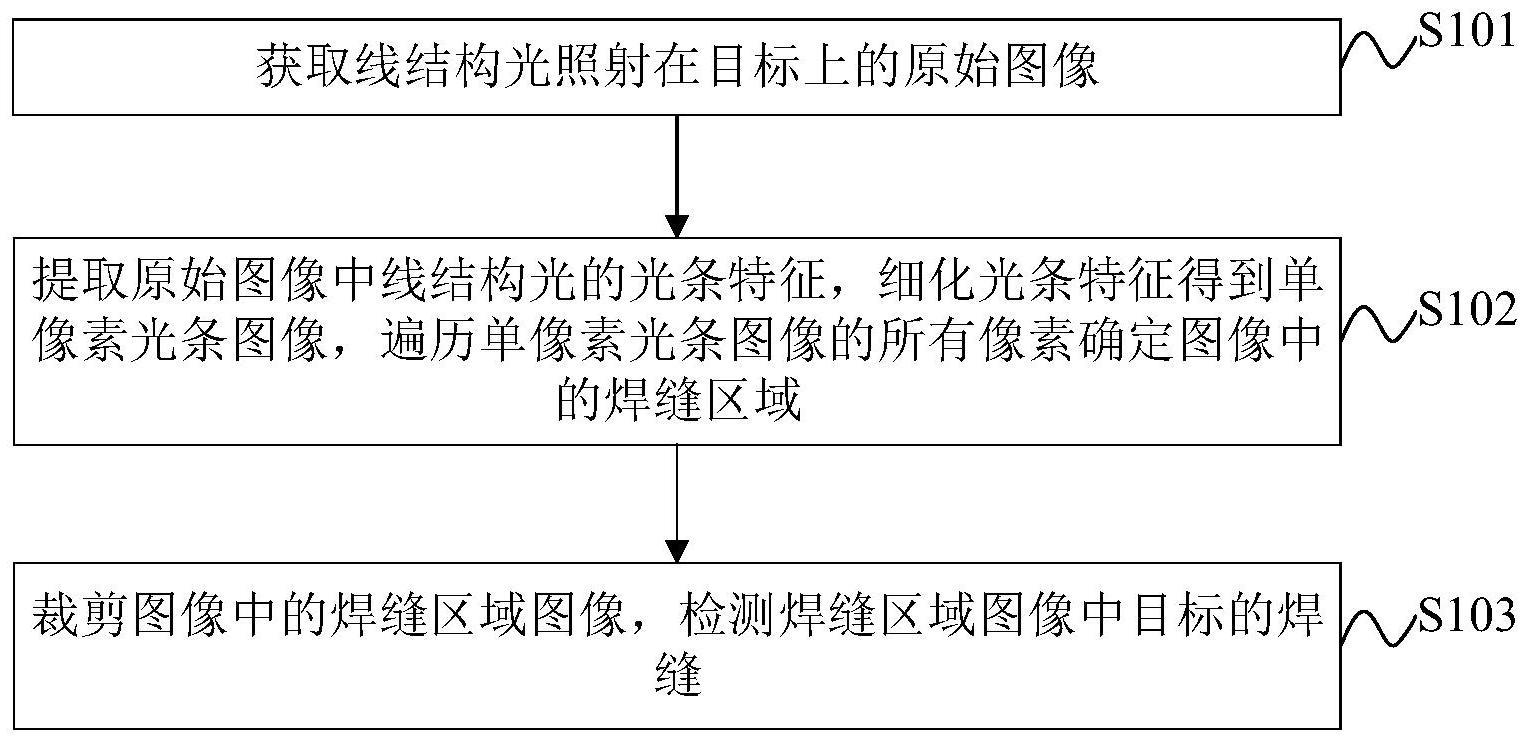
2、本申请第一方面实施例提供一种焊缝检测方法,包括以下步骤:获取线结构光照射在目标上的原始图像;提取所述原始图像中线结构光的光条特征,细化所述光条特征得到单像素光条图像,遍历所述单像素光条图像的所有像素确定所述图像中的焊缝区域;裁剪所述图像中的焊缝区域图像,检测所述焊缝区域图像中所述目标的焊缝。
3、根据上述技术手段,本申请实施例可以对线结构光的焊缝扫描图像进行单像素处理,以快速准确的确定焊缝位置,并提取焊缝区域图像,利用焊缝区域图像检测焊缝,由于排除了焊缝区域以外的信息干扰,且直接检测焊缝区域,因此可以提升焊缝检测的准确性和效率。
4、可选地,在本申请的一个实施例中,所述细化所述光条特征得到单像素光条图像,包括:利用预设细化算法将每行光条特征细化为一个像素,得到每行一个像素的单像素光条图像。
5、根据上述技术手段,本申请实施例可以通过细化光条特征得到单像素光条图像,在保留光条特征的同时,进一步减少了数据量,为后续焊缝区域图像的提取提供了前提条件,同时可以有效提升细化算法的效率。
6、可选地,在本申请的一个实施例中,所述遍历所述单像素光条图像的所有像素确定所述原始图像中的焊缝区域,包括:按行遍历所述单像素光条图像,得到每行的前景像素坐标;计算相邻两行前景像素坐标的欧氏距离,将两像素坐标及欧氏距离保存在预设变量中,遍历过程中更新所述预设变量,直至遍历完成;根据所述预设变量中欧氏距离最大的两像素坐标中点作为焊缝区域的中心,根据所述焊缝区域的中心在所述原始图像中沿图像坐标轴正负方向各取预设像素值,得到所述焊缝区域。
7、根据上述技术手段,本申请实施例可以通过遍历单像素光条图像,并基于欧式距离最大的两像素坐标中心沿图像坐标轴正负方向各取预设像素值得到焊缝区域,可以有效提升焊缝区域的图像效果,同时排除焊缝区域以外的信息干扰,直接提取焊缝区域图像,以便于后续直接检测焊缝区域,从而可以有效提高焊缝检测的准确度和效率。
8、可选地,在本申请的一个实施例中,在提取所述原始图像中线结构光的光条特征之前,包括:灰度化所述原始图像,得到灰度图像;对所述灰度图像进行噪音去除处理,得到处理后的原始图像。
9、根据上述技术手段,本申请实施例可以通过对原始图像进行灰度处理,以便于后续的图像处理,通过对灰度图像进行去噪处理,可以有效排除噪音的干扰,同时增强光条特征。
10、本申请第二方面实施例提供一种焊缝检测装置,包括:获取模块,用于获取线结构光照射在目标上的原始图像;提取模块,用于提取所述原始图像中线结构光的光条特征,细化所述光条特征得到单像素光条图像,遍历所述单像素光条图像的所有像素确定所述图像中的焊缝区域;检测模块,用于裁剪所述图像中的焊缝区域图像,检测所述焊缝区域图像中所述目标的焊缝。
11、可选地,在本申请的一个实施例中,所述提取模块进一步用于:利用预设细化算法将每行光条特征细化为一个像素,得到每行一个像素的单像素光条图像。
12、可选地,在本申请的一个实施例中,所述提取模块进一步用于:按行遍历所述单像素光条图像,得到每行的前景像素坐标;计算相邻两行前景像素坐标的欧氏距离,将两像素坐标及欧氏距离保存在预设变量中,遍历过程中更新所述预设变量,直至遍历完成;根据所述预设变量中欧氏距离最大的两像素坐标中点作为焊缝区域的中心,根据所述焊缝区域的中心在所述原始图像中沿图像坐标轴正负方向各取预设像素值,得到所述焊缝区域。
13、可选地,在本申请的一个实施例中,本申请实施例的装置还包括:处理模块,用于在提取所述原始图像中线结构光的光条特征之前,灰度化所述原始图像,得到灰度图像;对所述灰度图像进行噪音去除处理,得到处理后的原始图像。
14、本申请第三方面实施例提供一种电子设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的焊缝检测方法。
15、本申请第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的焊缝检测方法。
16、由此,本申请至少具有如下有益效果:
17、1、本申请实施例可以对线结构光的焊缝扫描图像进行单像素处理,以快速准确的确定焊缝位置,并提取焊缝区域图像,利用焊缝区域图像检测焊缝,由于排除了焊缝区域以外的信息干扰,且直接检测焊缝区域,因此可以提升焊缝检测的准确性和效率。
18、2、本申请实施例可以通过细化光条特征得到单像素光条图像,在保留光条特征的同时,进一步减少了数据量,为后续焊缝区域图像的提取提供了前提条件,同时可以有效提升细化算法的效率。
19、3、本申请实施例可以通过遍历单像素光条图像,并基于欧式距离最大的两像素坐标中心沿图像坐标轴正负方向各取预设像素值得到焊缝区域,可以有效提升焊缝区域的图像效果,同时排除焊缝区域以外的信息干扰,直接提取焊缝区域图像,以便于后续直接检测焊缝区域,从而可以有效提高焊缝检测的准确度和效率。
20、4、本申请实施例可以通过对原始图像进行灰度处理,以便于后续的图像处理,通过对灰度图像进行去噪处理,可以有效排除噪音的干扰,同时增强光条特征。
21、由此,解决了相关技术中基于整个图像进行焊缝检测,检测效率较低,且容易受到焊缝区域以外信息的干扰,大大降低焊缝检测准确性等技术问题。
22、本申请附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。
技术特征:
1.一种焊缝检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述细化所述光条特征得到单像素光条图像,包括:
3.根据权利要求2所述的方法,其特征在于,所述遍历所述单像素光条图像的所有像素确定所述原始图像中的焊缝区域,包括:
4.根据权利要求1所述的方法,其特征在于,在提取所述原始图像中线结构光的光条特征之前,包括:
5.一种焊缝检测装置,其特征在于,包括:
6.根据权利要求5所述的装置,其特征在于,所述提取模块进一步用于:
7.根据权利要求6所述的装置,其特征在于,所述提取模块进一步用于:
8.根据权利要求5所述的装置,其特征在于,还包括:
9.一种电子设备,其特征在于,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如权利要求1-4任一项所述的焊缝检测方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行,以用于实现如权利要求1-4任一项所述的焊缝检测方法。
技术总结
本申请涉及焊接技术领域,特别涉及一种焊缝检测方法、装置、电子设备及存储介质,其中,方法包括:获取线结构光照射在目标上的原始图像;提取原始图像中线结构光的光条特征,细化光条特征得到单像素光条图像,遍历单像素光条图像的所有像素确定图像中的焊缝区域;裁剪图像中的焊缝区域图像,检测焊缝区域图像中目标的焊缝。由此,解决了相关技术中基于整个图像进行焊缝检测,检测效率较低,且容易受到焊缝区域以外信息的干扰,大大降低焊缝检测准确性等问题。
技术研发人员:刘定涛,李霜,王清
受保护的技术使用者:重庆长安汽车股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!