用于提高车辆的定位精度的方法、装置及计算机程序产品与流程
本申请涉及汽车领域,特别涉及用于提高车辆的定位精度的方法、装置及计算机程序产品。
背景技术:
1、现代车辆通常配备有用于获知车辆位置的定位模块。定位模块可以通过接收卫星导航信号来获知并提供车辆位置。定位模块的定位精度会受到车辆周围环境的影响。例如,当车辆行驶在空旷开阔路面时,例如高速公路上,定位模块通常可以提供较准确的车辆位置。然而,当车辆行驶在高楼林立的城市或者穿过桥梁、隧道等时,定位系统提供的位置有时是不准确的,这导致定位精度会有较大的波动。这是因为诸如楼房、树木、桥梁、隧道等物体遮挡了卫星导航信号,导致定位模块无法获知准确的车辆位置。
2、因此,希望提供一种改进的技术方案来解决现有技术中的上述问题。
技术实现思路
1、针对以上问题,本申请旨在提出用于提高车辆的定位精度的方法、装置及计算机程序产品。
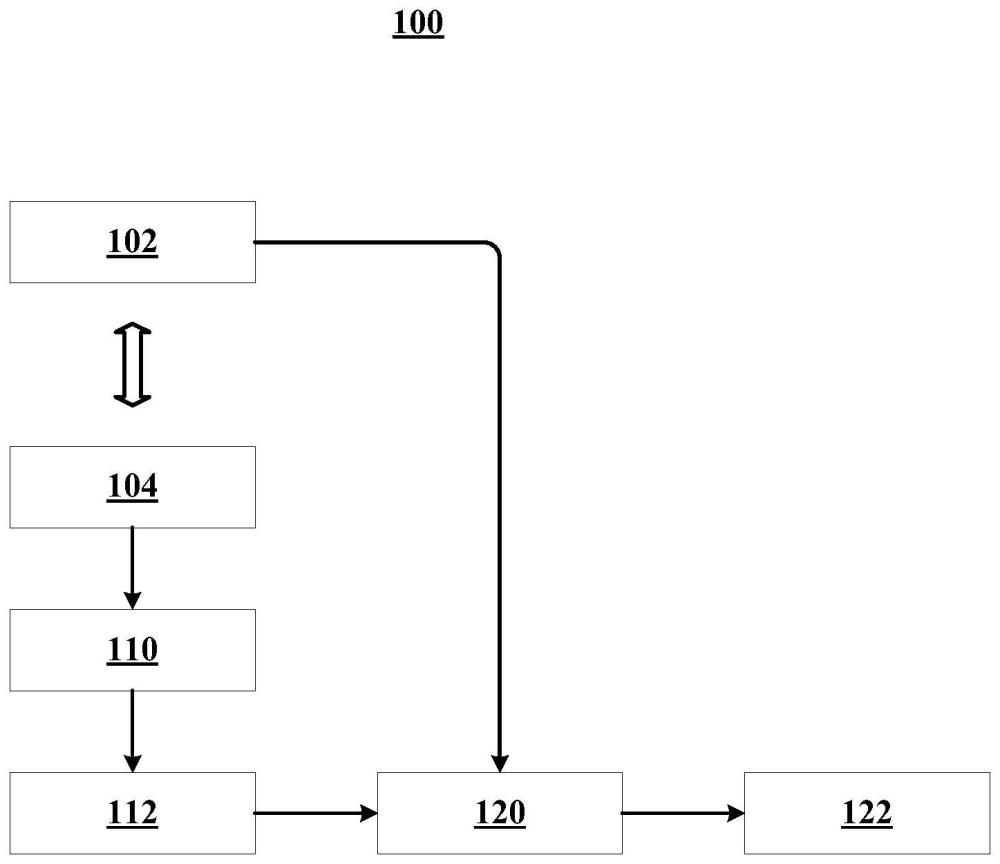
2、本申请提供了一种用于提高车辆的定位精度的方法。所述方法可以包括:获得车辆的实测位置;检测与所述实测位置相对应的车辆环境特征;基于所述车辆环境特征来计算位置补偿值;以及利用所述位置补偿值对所述实测位置进行补偿,以提高所述车辆的定位精度。
3、在一种实施方式中,所述检测与所述实测位置相对应的车辆环境特征可以包括:获得与所述实测位置相对应的时间;获得在所述时间由所述车辆的传感器捕获的关于所述车辆的周围环境的图像;识别所述图像中的遮挡物体;检测所述遮挡物体的物体特征,所述物体特征包括以下至少之一:所述遮挡物体的类别、所述遮挡物体的形状、所述遮挡物体的尺寸以及所述遮挡物体相对于所述车辆的方位;以及将所述物体特征和/或所述时间组合成所述车辆环境特征。
4、所述识别所述图像中的遮挡物体可以包括:通过图像识别技术,从所述图像中识别具有预定义类别的物体,所述预定义类别包括楼房、树木、桥梁和隧道中至少之一;以及将所识别的物体作为所述遮挡物体。
5、在一种实施方式中,所述基于所述车辆环境特征来计算位置补偿值可以包括:通过补偿值计算模型,基于所述车辆环境特征来计算所述位置补偿值。
6、所述补偿值计算模型的训练可以包括:通过测试车辆和位置仿真系统来生成训练数据集合;以及利用所述训练数据集合来训练所述补偿值计算模型。
7、所述通过测试车辆和位置仿真系统来生成训练数据集合可以包括:获得由所述测试车辆的定位模块输出的一组实测位置样本;获得由所述位置仿真系统输出的一组仿真位置样本;通过所述一组实测位置样本和所述一组仿真位置样本来形成多个误差位置对;基于所述多个误差位置对来生成多个训练样本;以及将所述多个训练样本组合成所述训练数据集合。
8、所述一组实测位置样本和所述一组仿真位置样本可以是在相同条件下产生的。所述相同条件可以包括相同车辆、相同起点、相同终点和相同行驶路线。
9、所述通过所述一组实测位置样本和所述一组仿真位置样本来形成多个误差位置对可以包括,对于所述一组实测位置样本中的每个实测位置样本:从所述一组仿真位置样本中提取其时间与所述实测位置样本的时间相同的仿真位置样本;计算所述实测位置样本与所述仿真位置样本之间的差值;确定所述差值是否超过预定阈值;以及响应于确定所述差值超过预定阈值,将所述实测位置样本和所述仿真位置样本组合成误差位置对。
10、所述基于所述多个误差位置对来生成多个训练样本可以包括,对于所述多个误差位置对中的每个误差位置对:检测与所述误差位置对中的实测位置样本相对应的车辆环境特征样本;通过计算所述误差位置对中的实测位置样本与仿真位置样本之间的差值来生成与所述车辆环境特征样本相对应的位置补偿值标注;以及将所述车辆环境特征样本与所述位置补偿值标注组合成与所述误差位置对相对应的训练样本。
11、所述检测与所述误差位置对中的实测位置样本相对应的车辆环境特征样本可以包括:获得与所述误差位置对相对应的时间样本;获得在所述时间样本由所述测试车辆的传感器捕获的关于所述测试车辆的周围环境的图像样本;识别所述图像样本中的遮挡物体样本;检测所述遮挡物体样本的物体特征样本,所述物体特征样本包括以下至少之一:所述遮挡物体样本的类别、所述遮挡物体样本的形状、所述遮挡物体样本的尺寸以及所述遮挡物体样本相对于所述测试车辆的方位;以及将所述物体特征样本和/或所述时间样本组合成所述车辆环境特征样本。
12、本申请还提供了一种用于提高车辆的定位精度的装置。所述装置可以包括:实测位置获得模块,用于获得车辆的实测位置;车辆环境特征检测模块,用于检测与所述实测位置相对应的车辆环境特征;补偿值计算模块,用于基于所述车辆环境特征来计算位置补偿值;以及位置补偿模块,用于利用所述位置补偿值对所述实测位置进行补偿,以提高所述车辆的定位精度。
13、在一种实施方式中,所述车辆环境特征检测模块可以包括:时间获得模块,用于获得与所述实测位置相对应的时间;图像获得模块,用于获得在所述时间由所述车辆的传感器捕获的关于所述车辆的周围环境的图像;遮挡物体识别模块,用于识别所述图像中的遮挡物体;物体特征检测模块,用于检测所述遮挡物体的物体特征,所述物体特征包括以下至少之一:所述遮挡物体的类别、所述遮挡物体的形状、所述遮挡物体的尺寸以及所述遮挡物体相对于所述车辆的方位;以及车辆环境特征组合模块,用于将所述物体特征和/或所述时间组合成所述车辆环境特征。
14、在一种实施方式中,所述补偿值计算模块可以是基于机器学习的补偿值计算模型。所述补偿值计算模型的训练可以包括:通过测试车辆和位置仿真系统来生成训练数据集合;以及利用所述训练数据集合来训练所述补偿值计算模型。
15、本申请还提供了一种用于提高车辆的定位精度的装置。所述装置可以包括:处理器;以及存储计算机可执行指令的存储器,所述计算机可执行指令在被执行时使得所述处理器实施上文所述的用于提高车辆的定位精度的方法。
16、本申请还提供了一种用于泊车辅助的计算机程序产品。所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行用于实施上文所述的用于提高车辆的定位精度的方法。
17、采用本申请的上述技术手段,可以基于与车辆的实测位置相对应的车辆环境特征来计算位置补偿值,并且可以利用位置补偿值对实测位置进行补偿,从而提高车辆的定位精度。
技术特征:
1.一种用于提高车辆的定位精度的方法,包括:
2.根据权利要求1所述的方法,其中,所述检测与所述实测位置相对应的车辆环境特征包括:
3.根据权利要求2所述的方法,其中,所述识别所述图像中的遮挡物体包括:
4.根据权利要求1所述的方法,其中,所述基于所述车辆环境特征来计算位置补偿值包括:
5.根据权利要求4所述的方法,其中,所述补偿值计算模型的训练包括:
6.根据权利要求5所述的方法,其中,所述通过测试车辆和位置仿真系统来生成训练数据集合包括:
7.根据权利要求6所述的方法,其中,所述一组实测位置样本和所述一组仿真位置样本是在相同条件下产生的,所述相同条件包括相同车辆、相同起点、相同终点和相同行驶路线。
8.根据权利要求6所述的方法,其中,所述通过所述一组实测位置样本和所述一组仿真位置样本来形成多个误差位置对包括,对于所述一组实测位置样本中的每个实测位置样本:
9.根据权利要求6所述的方法,其中,所述基于所述多个误差位置对来生成多个训练样本包括,对于所述多个误差位置对中的每个误差位置对:
10.根据权利要求9所述的方法,其中,所述检测与所述误差位置对中的实测位置样本相对应的车辆环境特征样本包括:
11.一种用于提高车辆的定位精度的装置,包括:
12.根据权利要求11所述的装置,其中,所述车辆环境特征检测模块包括:
13.根据权利要求11所述的装置,其中,所述补偿值计算模块是基于机器学习的补偿值计算模型,并且所述补偿值计算模型的训练包括:
14.一种用于提高车辆的定位精度的装置,包括:
15.一种用于提高车辆的定位精度的计算机程序产品,包括计算机程序,所述计算机程序被处理器执行用于实施根据权利要求1至10中任一项所述的方法。
技术总结
本公开提出了用于提高车辆的定位精度的方法、装置和计算机程序产品。可以获得车辆的实测位置。可以检测与所述实测位置相对应的车辆环境特征。可以基于所述车辆环境特征来计算位置补偿值。可以利用所述位置补偿值对所述实测位置进行补偿,以提高所述车辆的定位精度。
技术研发人员:董佳灵
受保护的技术使用者:罗伯特·博世有限公司
技术研发日:
技术公布日:2024/6/13
- 还没有人留言评论。精彩留言会获得点赞!