使用生成补码图像辅助计算绝对相位的方法与流程
本发明属于机器视觉,特别是涉及一种使用生成补码图像辅助计算绝对相位的方法。
背景技术:
1、随着工业自动化程度的提高,机器视觉的快速发展,光学三维测量在工业自动化领域被广泛应用,结构光三维成像是目前主流的三维成像方案,按照其表现形态可以分为基于线和基于面两种,在面结构光成像的方法中,相位测量轮廓术是使用最广泛的一种。
2、现有的相位测量轮廓术多使用移相法实现,其实现的主要步骤分为两步:第一步,投射相移图片,通过计算获取场景下被测物的绝对相位信息;第二步,使用标定好的相机参数解算第一步中的相位图,将相位信息换算为深度信息。
3、在计算绝对相位时,为了提升设备或相机在深度方向的分辨率,通常会使用几十或上百条正弦投影的条纹,为确保展开这几十上百条包裹相位得到全局相位信息,必然需要一些辅助的方法来完成全局相位计算,格雷码结合相移就是其中一种。
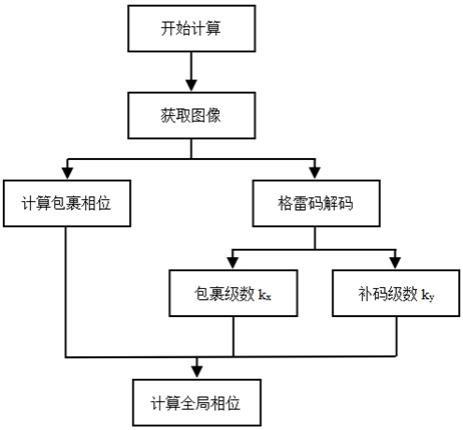
4、在使用相移格雷码的方法时,先计算相移的包裹相位φ,再通过格雷码辅助确定这些包裹相位的级数n,最后利用φ=2*π*n+φ计算全局相位信息。
5、但在计算全局相位的过程中,虽然每一级的包裹相位和格雷码的最小区域在投影图像上是一一对应的关系,但在实际的拍摄过程中,因为图像的分辨率或格雷码边缘的提取误差,往往会导致相邻的级数交界处计算出的全局相位会存在2π的相位误差,这种误差对最终的成像精度和成像质量都有非常大的影响。
技术实现思路
1、本发明主要解决的技术问题是提供一种使用生成补码图像辅助计算绝对相位的方法,所需要的图片仅为格雷码图片与相移图片本身,不需要设计新的补码图片,可以解决在解相位的过程中存在的2π相位跳变,保证最终的成像精度和成像质量。
2、为解决上述技术问题,本发明采用的一个技术方案是:一种使用生成补码图像辅助计算绝对相位的方法,包括以下步骤:
3、s1:生成正弦编码图片,其中图片上正弦条纹条数为2n,采用n步移相法实现投影,投影后的正弦编码图片有:i0、i1、i2…in-1;
4、s2:生成辅助格雷码图片,根据步骤s1中正弦条纹条数2n,共生成格雷码图片总张数为n+1,即格雷码图片有:g1、g2、g3…gn+1;
5、s3:将步骤s1中的投影后的正弦编码图片经过相机捕获后的图片,通过以下公式计算相位信息,计算得到包裹相位;
6、
7、s4:对步骤s2中格雷码图片进行解码操作,归一化格雷码图片,得到归一化的二值化图片gb,gb包括gb1、gb2…gbn+1,其中gb1图片不变,其余图片均与上一张异或图片进行异或,以分割出格雷码的空间区域,得到异或图片xg,xg包括xg1、xg2、xg3…xgn+1,使用公式kx=xg1*2n-1+xg2*2n-2+…+xgn-1*21+xgn*20 ,计算出与包裹相位对应的级数kx;
8、s5:生产补码级数,步骤s4中求解出的级数kx是刚好与包裹相位对应的级数,但异或图片xgn+1还未参与计算,使用公式ky=xg1*2n-1+xg2*2n-2+…+xgn-1*21+xgn*20+xgn+1,计算出补码级数ky;
9、s6:利用步骤s4计算出的与包裹相位对应的级数以及步骤s5计算出的补码级数,通过步骤s3计算出的包裹相位,选取0 ~π/2,π/2~2π/3或2π/3 ~ 2π作为单个包裹周期内的计算区间计算全局相位,使用如下公式:
10、
11、进一步地说,在步骤s2的公式中的k为具体的相移次数,在公式中ik指将投影后的正弦编码图片上每个像素点带入公式。
12、进一步地说,在步骤s4中异或图片操作的具体步骤是第一张gb1即为xg1,第二张xg2为gb2异或xg1,第三张 xg3为gb3异或xg2…第n+1张 xgn+1 为 gbn+1异或xgn。
13、进一步地说,在步骤s1中n步移相法中n≥3。
14、进一步地说,在步骤s4中和s5中,带入公式的gb和xg皆指将图片的每个像素点带入公式。
15、进一步地说,在步骤s1中移相法是相机拍摄由投影设备投射出的一组条纹数相同,但初始相位不同的正弦条纹图片。
16、进一步地说,在步骤s1中正弦条纹数2n,n取值与需要生成的图片分辨率和投影仪的分辨率相关。
17、本发明的有益效果至少具有以下几点:
18、本发明在计算包裹相位展开过程中,在包裹相位前后交界处使用级数参与计算,在包裹相位中间位置使用格雷码的级数计算,最后将两者结合起来即可完成无相位跳变的全局相位,可以解决在解相位的过程中存在的2π相位跳变;
19、本发明所需要的图片仅为格雷码图片与相移图片本身,不需要设计新的补码图片。
技术特征:
1.一种使用生成补码图像辅助计算绝对相位的方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的使用生成补码图像辅助计算绝对相位的方法,其特征在于:在步骤s2的公式中的k为具体的相移次数,在公式中ik指将投影后的正弦编码图片上每个像素点带入公式。
3.根据权利要求1所述的使用生成补码图像辅助计算绝对相位的方法,其特征在于:在步骤s4中异或图片操作的具体步骤是第一张gb1即为xg1,第二张xg2为gb2异或xg1,第三张xg3为gb3异或xg2…第n+1张 xgn+1 为 gbn+1异或xgn。
4.根据权利要求1所述的使用生成补码图像辅助计算绝对相位的方法,其特征在于:在步骤s1中n步移相法中n≥3。
5.根据权利要求1所述的使用生成补码图像辅助计算绝对相位的方法,其特征在于:在步骤s4中和s5中,带入公式的gb和xg皆指将图片的每个像素点带入公式。
6.根据权利要求1所述的使用生成补码图像辅助计算绝对相位的方法,其特征在于:在步骤s1中移相法是相机拍摄由投影设备投射出的一组条纹数相同,但初始相位不同的正弦条纹图片。
7.根据权利要求1所述的使用生成补码图像辅助计算绝对相位的方法,其特征在于:在步骤s1中正弦条纹数2n,n取值与需要生成的图片分辨率和投影仪的分辨率相关。
技术总结
本发明公开了一种使用生成补码图像辅助计算绝对相位的方法,包括以下步骤:生成正弦编码图片,其中图片上正弦条纹条数为2<supgt;n</supgt;,采用N步移相法实现投影,生成格雷码图片总张数为n+1,计算得到包裹相位,对格雷码图片进行解码操作,归一化格雷码图片,得到归一化的二值化图片GB<subgt;1、</subgt;GB<subgt;2</subgt;…GB<subgt;n+1</subgt;,其中GB<subgt;1</subgt;图片不变,其余图片均与上一张异或图片进行异或,以分割出格雷码的空间区域,得到异或图片XG<subgt;1</subgt;、XG<subgt;2</subgt;、XG<subgt;3</subgt;…XG<subgt;n+1</subgt;,使用公式k<subgt;x</subgt;=XG<subgt;1</subgt;*2<supgt;n‑1</supgt;+XG<subgt;2</subgt;*2<supgt;n‑2</supgt;+…+XG<subgt;n‑1</subgt;*2<supgt;1</supgt;+XG<subgt;n</subgt;*2<supgt;0</supgt;,计算出与包裹相位对应的级数k<subgt;x</subgt;,使用公式k<subgt;y</subgt;=XG<subgt;1</subgt;*2<supgt;n‑1</supgt;+XG<subgt;2</subgt;*2<supgt;n‑2</supgt;+…+XG<subgt;n‑1</subgt;*2<supgt;1</supgt;+XG<subgt;n</subgt;*2<supgt;0</supgt;+XG<subgt;n+1</subgt;,计算出补码级数k<subgt;y</subgt;,选取0~π/2,π/2~2π/3或2π/3~2π作为单个包裹周期内的计算区间计算全局相位。本发明可以解决在解相位的过程中存在的2π相位跳变,保证最终的成像精度和成像质量。
技术研发人员:徐志飞,王棠猛
受保护的技术使用者:大帧科技(苏州)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!