用于确定作物叶面积指数的方法、装置及处理器与流程
本申请涉及农业领域,具体地涉及一种用于确定作物叶面积指数的方法、装置、存储介质及处理器。
背景技术:
1、目前,传统的叶面积指数主要采用叶面扫描设备和光学设备进行测量。其中,通过页面扫描设备获取叶面积指数时,需要将所有作物的叶片取下,耗费的人工成本较大,容易对农田造成破坏。通过光学设备确定叶面积指数时,一般通过测量作物底部或上部冠层的光穿透强度来确定。其中,常用的光学设备有灌层分析仪以及鱼眼相机等。但采用该种方式确定作物的叶面积指数,需要作业人员携带设备进行种植区域中进行实地测量,难以避免人工对种植区域内的作物进行破坏,降低确定的叶面积指数的准确性,所需耗费的人工、时间以及设备使用的成本较大,难以提高确定叶面积指数的效率。
技术实现思路
1、本申请实施例的目的是提供一种用于确定作物叶面积指数的方法、装置、存储介质及处理器。
2、为了实现上述目的,本申请第一方面提供一种用于确定作物叶面积指数的方法,包括:
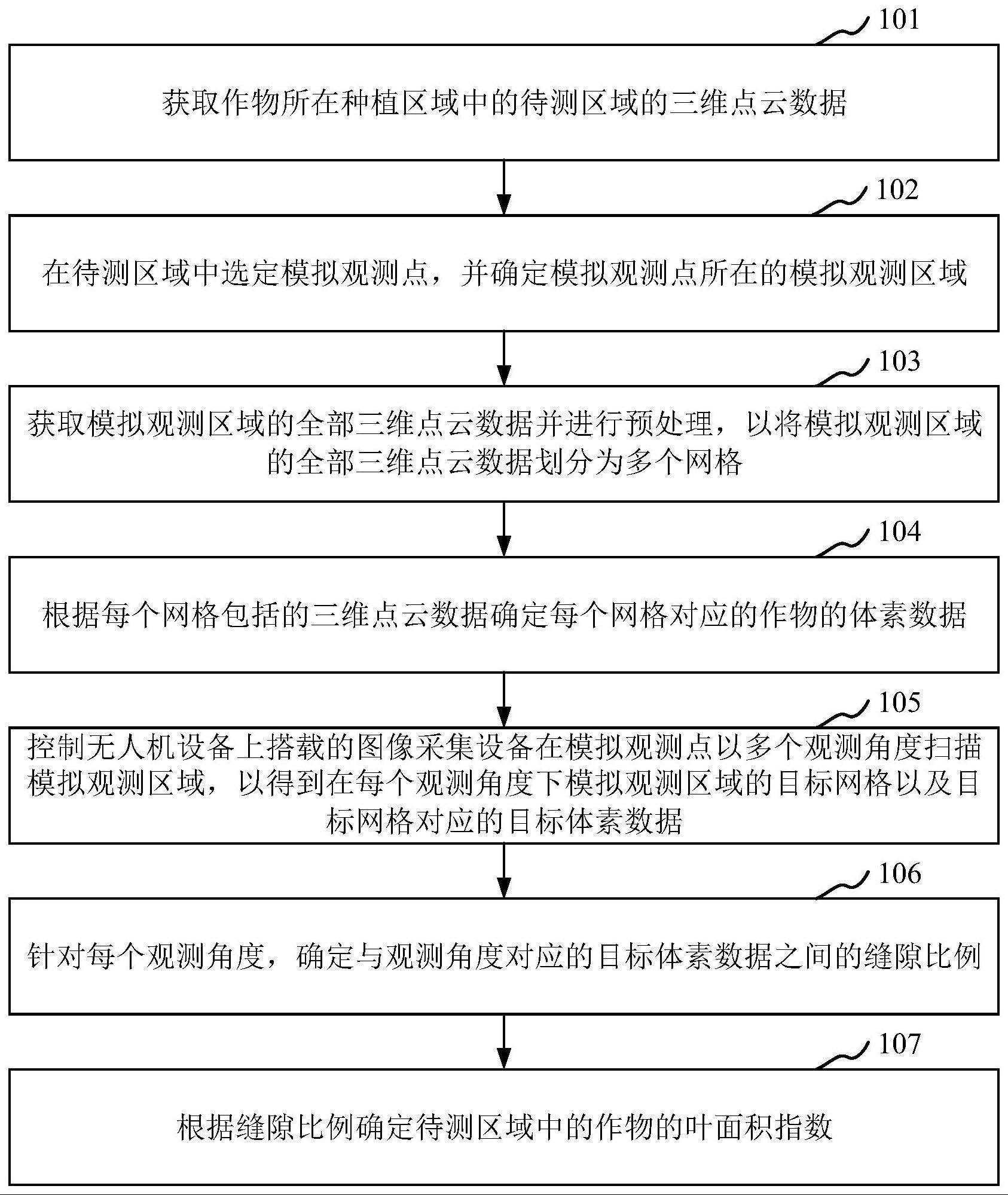
3、获取作物所在种植区域中的待测区域的三维点云数据;
4、在待测区域中选定模拟观测点,并确定模拟观测点所在的模拟观测区域;
5、获取模拟观测区域的全部三维点云数据并进行预处理,以将模拟观测区域的全部三维点云数据划分为多个网格;
6、根据每个网格包括的三维点云数据确定每个网格对应的作物的体素数据;
7、控制无人机设备上搭载的图像采集设备在模拟观测点以多个观测角度扫描模拟观测区域,以得到在每个观测角度下模拟观测区域的目标网格以及目标网格对应的目标体素数据;
8、针对每个观测角度,确定与观测角度对应的目标体素数据之间的缝隙比例;
9、根据缝隙比例确定待测区域中的作物的叶面积指数。
10、在本申请的实施例中,根据缝隙比例确定待测区域中的作物的叶面积指数包括:从全部的观测角度中选出多个特定观测角度;将多个特定观测角度按照从小到大的顺序排序,并根据任意相邻的两个特定观测角度所构成的角度区间确定多个观测角度环;针对任意一个观测角度环,根据观测角度环包括的全部观测角度的缝隙比例确定观测角度环的缝隙总比例;对多个观测角度环的缝隙总比例进行加权求和,以确定叶面积指数。
11、在本申请的实施例中,叶面积指数通过公式(1)确定:
12、
13、其中,lai是指叶面积指数,i是指第i个观测角度环,n是指观测角度环的总数量,θi是指第i个观测角度环包括的观测角度,p(θi)是指第i个观测角度环的缝隙总比例,wi是指第i个观测角度环的权重。
14、在本申请的实施例中,将观测角度环按照区间大小进行排序,且排序在前的m个观测角度环的权重均大于排序在后的观测角度环的权重,其中,m为自然数,m是根据观测角度环的数量与预设百分比的乘积确定的。
15、在本申请的实施例中,方法还包括:在根据缝隙比例确定待测区域中的作物的叶面积指数之后,确定作物的生育期;确定与生育期对应的聚集指数;根据聚集指数和叶面积指数确定作物的真实叶面积指数。
16、在本申请的实施例中,在待测区域中选定模拟观测点,并确定模拟观测点所在的模拟观测区域包括:确定待测区域中作物的冠层区域,冠层区域是指位于待测区域上方、与作物的冠层间隔第一数值且面积与待测区域相等的平面区域;将冠层区域的中心点确定为模拟观测点;将以模拟观测点在待测区域的投影点为原点,半径为第二数值所构成的圆形区域确定为模拟观测区域。
17、在本申请的实施例中,获取作物所在种植区域中的待测区域的三维点云数据包括:控制无人机设备按照预设路径和预设高度飞行,并控制图像采集设备按照预设倾角和预设分辨率进行图像采集作业,以获取待测区域的区域图像;根据区域图像生成针对待测区域的三维点云数据。
18、在本申请的实施例中,方法还包括:将叶面积指数和/或真实叶面积指数发送至显示设备以显示。
19、本申请第二方面提供一种机器可读存储介质,该机器可读存储介质上存储有指令,该指令在被处理器执行时使得处理器被配置成执行上述的用于确定作物叶面积指数的方法。
20、本申请第三方面提供一种处理器,被配置成执行上述的用于确定作物叶面积指数的方法。
21、本申请第四方面提供一种用于确定作物叶面积指数的装置,包括上述的处理器。
22、通过上述技术方案,能够获取作物的待测区域的三维点云数据,以构建待测区域的三维场景,并在构建的三维场景中以多个观测角度扫描模拟观测区域,根据多个观测角度下的目标网格对应的目标体素数据确定每个观测角度下的缝隙比例,从而根据缝隙比例确定待测区域中作物的叶面积指数,能够极大地降低人工成本和时间成本,无需人工携带采集设备进入种植区域,避免破坏种植区域中的作物,大幅度提高确定叶面积指数的效率及准确性。
23、本申请实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种用于确定作物叶面积指数的方法,其特征在于,所述方法包括:
2.根据权利要求1所述的用于确定作物叶面积指数的方法,其特征在于,所述根据所述缝隙比例确定所述待测区域中的作物的叶面积指数包括:
3.根据权利要求2所述的用于确定作物叶面积指数的方法,其特征在于,所述叶面积指数通过公式(1)确定:
4.根据权利要求2所述的用于确定作物叶面积指数的方法,其特征在于,将所述观测角度环按照区间大小进行排序,且排序在前的m个观测角度环的权重均大于排序在后的观测角度环的权重,其中,m为自然数,m是根据所述观测角度环的数量与预设百分比的乘积确定的。
5.根据权利要求1所述的用于确定作物叶面积指数的方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的用于确定作物叶面积指数的方法,其特征在于,所述在所述待测区域中选定模拟观测点,并确定所述模拟观测点所在的模拟观测区域包括:
7.根据权利要求1所述的用于确定作物叶面积指数的方法,其特征在于,所述获取作物所在种植区域中的待测区域的三维点云数据包括:
8.根据权利要求1至7中任意一项所述的用于确定作物叶面积指数的方法,其特征在于,所述方法还包括:
9.一种机器可读存储介质,该机器可读存储介质上存储有指令,其特征在于,该指令在被处理器执行时使得所述处理器被配置成执行根据权利要求1至8中任一项所述的用于确定作物叶面积指数的方法。
10.一种处理器,其特征在于,被配置成执行根据权利要求1至8中任意一项所述的用于确定作物叶面积指数的方法。
11.一种用于确定作物叶面积指数的装置,其特征在于,所述装置包括根据权利要求10所述的处理器。
技术总结
本申请实施例提供一种用于确定作物叶面积指数的方法、装置及处理器。方法包括:获取作物所在种植区域中的待测区域的三维点云数据;在待测区域中选定模拟观测点,并确定模拟观测区域;获取模拟观测区域的全部三维点云数据并进行预处理,以划分多个网格;根据每个网格包括的三维点云数据确定每个网格对应的作物的体素数据;控制无人机设备上搭载的图像采集设备在模拟观测点以多个观测角度扫描模拟观测区域,以得到在每个观测角度下模拟观测区域的目标网格的目标体素数据;针对每个观测角度,确定与观测角度对应的目标体素数据之间的缝隙比例;根据缝隙比例确定待测区域中的作物的叶面积指数,以大幅度提高确定叶面积指数的效率及准确性。
技术研发人员:宋扬,丁丽,籍延宝
受保护的技术使用者:中联智慧农业股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!