一种可用于多种基础型式的海上风机混合模型试验方法
本发明属于海上风力发电,具体涉及一种多自由度海上风机室内实时混合模型试验方法。
背景技术:
1、海上风电开发是实现我国“碳达峰”、“碳中和”目标的重要举措。根据风能资源普查成果,我国海洋风能资源优质且丰厚,我国5~25米水深、50米高度海上风电开发潜力约2亿千瓦;5~50米水深、70米高度海上风电开发潜力约5亿千瓦。
2、海上风机基础是保持风机平稳运行、安全可靠的支撑结构,主要分为坐底式和漂浮式两种类型。海上风机在海洋中承受气动、水动等多种荷载作用,为了准确模拟海上风机所受的真实荷载,开展室内水池模型试验是必要的。传统水池模型试验通常采用弗劳德相似缩尺来模拟水动荷载,这与风机气动荷载模拟的雷诺相似发生了比尺冲突,使得在弗劳德相似下模型风机受得气动荷载往往偏小;同时,在弗劳德相似下模型风机对上部质量控制要求很高,这使其叶片制作、传感器安装、控制器集成等充满挑战;再者,受限于波浪水池的海洋环境模拟能力等因素,通常对多自由度风-浪-流大小、方向、时空分布及耦合效应模拟困难,水池模型试验存在着保真性、可控性、准确性等难题。
技术实现思路
1、针对现有水池模型试验和数值仿真存在的问题,本发明提出了一种可用于多种基础型式的海上风机混合模型试验方法,适用于坐底式和漂浮式等不同类型的海上风机室内模型试验,基于该方法可以有效实现海上风机多自由度动力响应的一体化模拟与分析。
2、本发明采用以下技术方案实现:
3、一种可用于多种基础型式的海上风机混合模型试验方法,步骤如下:
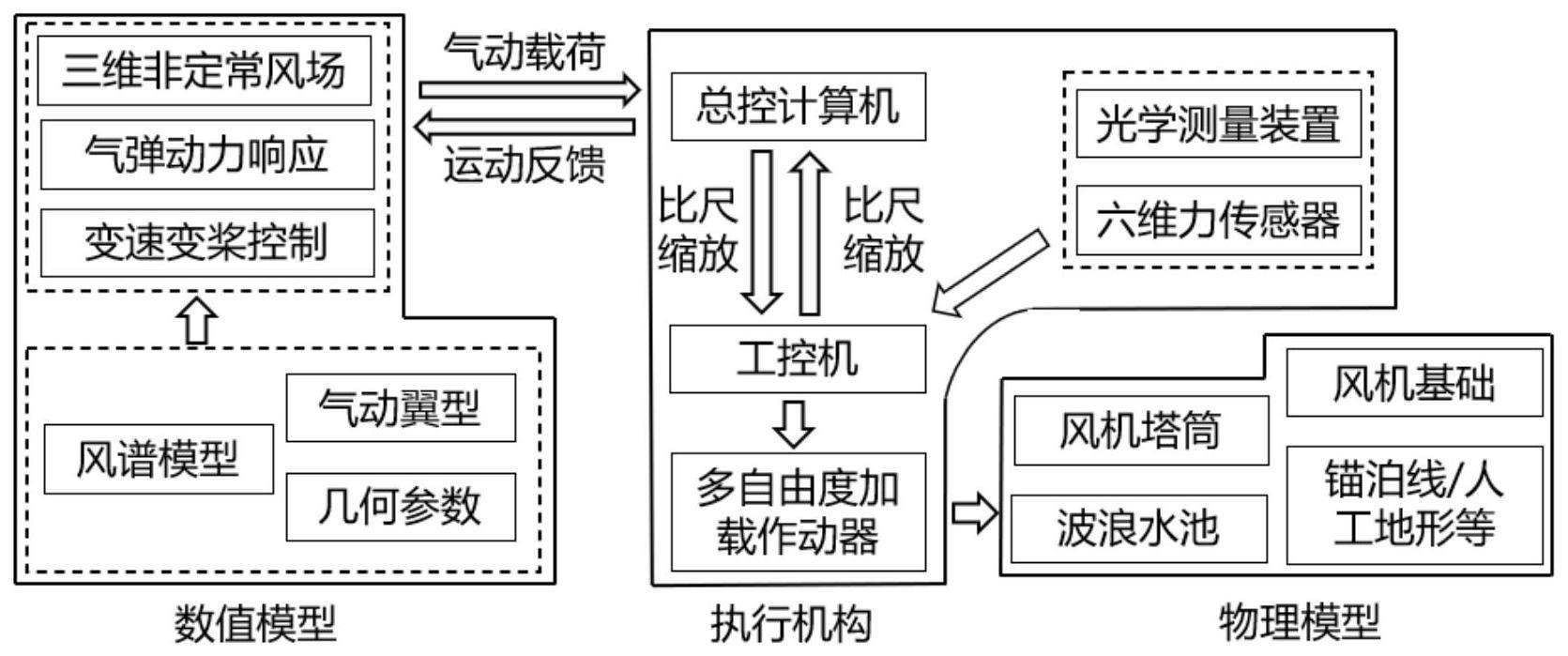
4、首先,根据所模拟风谱工况,利用空气动力学中的叶素动量模型,依据选定风机翼型的气动及结构参数计算风机塔筒顶端的多自由度气动荷载;所述多自由度气动荷载包括气动推力和气动扭矩;
5、接着,执行机构基于空气动力学中的叶素动量模型计算的给定风况下风机塔筒顶端多自由度气动荷载大小对物理模型进行加载,采集物理模型的运动响应和荷载响应信息,将所采集的信息经模型放大后反馈给空气动力学中的叶素动量模型进行下一个时间步的风机塔筒顶端多自由度气动荷载修正,并将修正后的风机塔筒顶端多自由度气动载荷经模型缩尺后发送给执行机构;循环进行至预定试验时间;
6、所述的空气动力学中的叶素动量模型包括三维非定常风场模块、气弹动力响应模块及变速变桨控制模块;所述的三维非定常风场模块用于模拟风轮空间内湍流风场,并将风场数据发送至气弹动力响应模块;所述的气弹动力响应模块依据所获得风场数据实时求解风机叶片结构气动荷载及弹性变形,并将气动荷载及弹性变形数据传递给变速变桨控制模块;所述的变速变桨控制模块依据所获得的气动荷载及弹性变形数据,通过pid算法求解风轮、发电机转轴转速及叶片桨距角,并基于叶片桨距角调节多自由度气动荷载,从而实现风机最优效率或额定功率捕获。
7、上述技术方案中,进一步地,所述物理模型包括风机塔筒、风机基础和锚泊线;所述物理模型放置在波浪水池中;所述物理模型满足froude相似准则,具体可通过公式(1)进行描述:
8、
9、式中,c为特征速度;l为特征尺度;g为重力加速度;frp与frm为实际与模型尺度下满足重力相似的froude数。
10、进一步地,所述执行机构包括多自由度加载作动器、六维力传感器、光学测量系统、工控机及总控计算机;所述多自由度加载作动器为倒扣的多自由度电动缸并联振动台,通过龙门吊倒扣于所述物理模型的风机塔筒顶端,通过其前后位移及俯仰控制实现风机塔筒顶端多自由度荷载的施加;所述六维力传感器用于测量所述物理模型的风机塔筒顶端所受的荷载,用于校准多自由度加载作动器所施加的荷载;所述光学测量系统为多个摄像机组成的三维运动动态捕捉系统,用于对所述物理模型的横荡、纵荡、垂荡及横摇、纵摇、艏摇六自由度漂移和转动响应信息的采集;所述总控计算机用于六维力传感器、光学测量系统、多自由度加载作动器及空气动力学中的叶素动量模型之间的数据存储,同时对交互数据进行滤波降噪;所述工控机与总控计算机相连,用于发送运动命令给多自由度加载作动器。
11、本发明通过将风机在某个部位进行截断切分,将结构整体划分为上下两部分,采用数值模型(即空气动力学中的叶素动量模型)模拟上部结构,下部结构设计为实际物理模型,即在数值模型中计算上部结构的气动荷载,在物理模型中施加水动荷载和数值模型所计算的气动荷载,充分结合了数值模拟和模型试验两者优点,可以有效解决比尺冲突等问题。
12、本发明有益效果是:
13、(1)解决了传统水池试验气动荷载与水动荷载的比尺冲突问题,并适用于漂浮式和坐底式等多种海上风机类型。
14、(2)无需额外搭建风机叶片模型,规避了考虑叶片质量、强度等的制作工艺问题。
15、(3)可进行塔顶多自由度荷载施加,并综合考虑了控制策略的影响,更接近于真实情况。
技术特征:
1.一种可用于多种基础型式的海上风机混合模型试验方法,其特征在于,该方法为:
2.根据权利要求1所述的一种可用于多种基础型式的海上风机混合模型试验方法,其特征在于,所述物理模型包括风机塔筒、风机基础和锚泊线;所述物理模型放置在波浪水池中;所述物理模型满足froude相似准则,具体可通过公式(1)进行描述:
3.根据权利要求2所述的一种可用于多种基础型式的海上风机混合模型试验方法,其特征在于,所述执行机构包括多自由度加载作动器、六维力传感器、光学测量系统、工控机及总控计算机;所述多自由度加载作动器为倒扣的多自由度电动缸并联振动台,通过龙门吊倒扣于所述物理模型的风机塔筒顶端,通过其前后位移及俯仰控制实现风机塔筒顶端多自由度荷载的施加;所述六维力传感器用于测量所述物理模型的风机塔筒顶端所受的荷载,用于校准多自由度加载作动器所施加的荷载;所述光学测量系统为多个摄像机组成的三维运动动态捕捉系统,用于对所述物理模型的横荡、纵荡、垂荡及横摇、纵摇、艏摇六自由度漂移和转动响应信息的采集;所述总控计算机用于六维力传感器、光学测量系统、多自由度加载作动器及空气动力学中的叶素动量模型之间的数据存储,同时对交互数据进行滤波降噪;所述工控机与总控计算机相连,用于发送运动命令给多自由度加载作动器。
4.根据权利要求1-3任一项所述的一种可用于多种基础型式的海上风机混合模型试验方法,其特征在于,该方法具体包括以下步骤:
技术总结
本发明公开了一种可用于多种基础型式的海上风机混合模型试验方法,适用于坐底式和漂浮式等不同类型的海上风机室内模型试验。本发明方法主要包括以下步骤:(1)确定实验缩尺比及加工物理模型;(2)选定室内波浪水池及波浪条件标定;(3)物理模型及执行机构吊装进场;(4)布置光学测量系统;(5)空气动力学中的叶素动量模型的迭代计算及整体试验开展。通过空气动力学中的叶素动量模型、物理模型、执行机构三部分在截断部位的信息交互,可以反应真实风机所受的荷载及运动响应情况。本发明解决了海上风机室内模型试验比尺不统一、叶片结构加工困难等系列问题,适用性广,高效可靠。
技术研发人员:徐航,滕龙,席晨,国振,王立忠,芮圣洁
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!