一种图像自动标注方法、终端及可读存储介质
本发明涉及终端应用领域,尤其涉及的是一种图像自动标注方法、终端及可读存储介质。
背景技术:
1、目标检测图像采集及其标注是计算机视觉领域中一个非常重要的问题,传统的目标检测图像采集装置通常使用单个相机(camera)拍摄目标在不同场景下的图像,并通过更换目标的位置和姿态,来模拟真实情况下目标的成像。目标检测图像的标注主要是人工标注。
2、人工标注完全依赖标注者使用labelimg、labelme或精灵标注助手等数据标注工具来完成对目标检测图像中目标位置和类别的标注。标注一个目标的边界框和类标签,首先,标注者需要点击一个紧密包围着目标的假想矩形的一角(比如左上角),然后点击鼠标并将其拖动到对角,以得到一个标注的矩形。标注者可能还需要通过单击矩形的边并拖动它们来进行进一步的调整,直到框紧贴在目标上。最后,标注者需要为这个标注目标选择它的类别标签并点击“提交”按钮。这三个步骤(点击第一个角点,拖动到第二个角点,标注类标签)构成了三个不同的任务,对于每个标注目标,标注者都需要重复操作,耗费大量时间。
3、因此,提高目标检测图像收集的效率和标注的速度成为了亟待解决的问题。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术缺陷,本发明提供一种图像自动标注方法、终端及可读存储介质,以解决目标检测图像收集速度慢、效率低的问题。
2、本发明解决技术问题所采用的技术方案如下:
3、第一方面,本发明提供了一种图像自动标注方法,所述图像自动标注方法包括以下步骤:
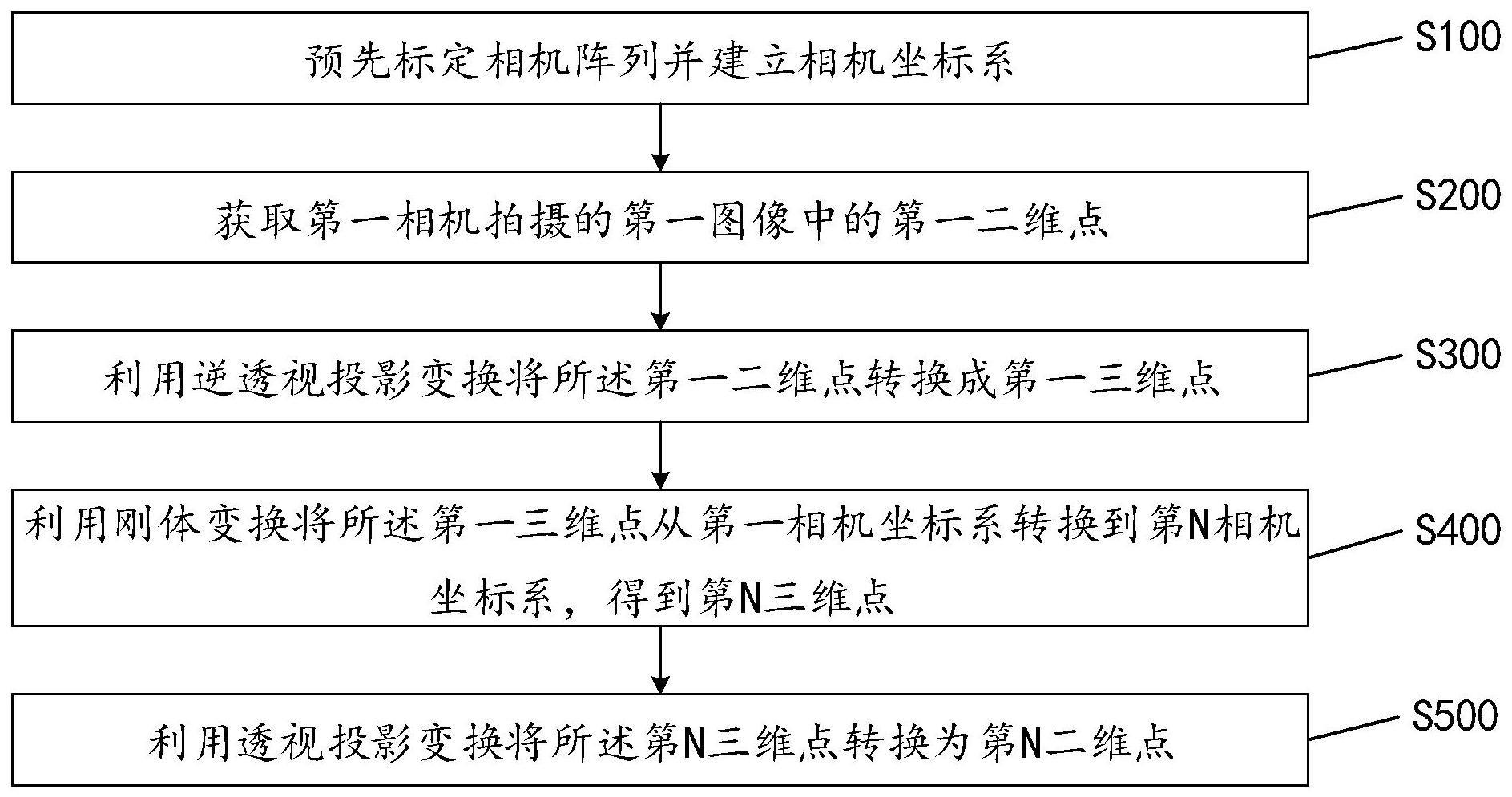
4、预先标定相机阵列并建立相机坐标系;其中,所述相机坐标系包括n个相机坐标系;
5、获取第一相机拍摄的第一图像中的第一二维点;其中,所述第一二维点为第一图像中的人工标注点;
6、利用逆透视投影变换将所述第一二维点转换成第一三维点;其中,所述第一三维点为与所述第一二维点对应的第一相机坐标系中的点;
7、利用刚体变换将所述第一三维点从所述第一相机坐标系转换到第n相机坐标系,得到第n三维点;
8、利用透视投影变换将所述第n三维点转换为第n二维点;其中,所述第n二维点为第n相机拍摄的第n图像中的点。
9、在一种实现方式中,所述预先标定相机阵列并建立相机坐标系,包括;
10、采用标定板对相机阵列中的各相机进行联合标定并为各相机建立对应的相机坐标系。
11、在一种实现方式中,所述获取第一相机拍摄的第一图像中的第一二维点,之前包括:
12、获取各相机的内参、相互之间的外参和畸变系数;
13、获取各相机距基座距离;其中,所述基座为目标物的支撑物;
14、获取目标物图像集,所述目标物图像集由每个相机各拍摄一张包含所述目标物的图像组成;其中,所述第一相机拍摄的图像称为所述第一图像,所述第n相机拍摄的图像称为所述第n图像。
15、在一种实现方式中,所述获取第一相机拍摄的第一图像中的第一二维点,包括:
16、标注第一相机拍摄的第一图像作为所述第一二维点。
17、在一种实现方式中,所述利用逆透视投影变换将所述第一二维点转换成第一三维点,包括:
18、所述逆透视投影变换公式为:
19、
20、其中,(u,v)为所述第一二维点坐标,(x,y,z)为所述第一三维点,zc1为第一相机距基座距离,k1为第一相机的内参;
21、将所述第一二维点坐标输入所述逆透视投影变换公式得到所述第一三维点坐标。
22、在一种实现方式中,所述利用刚体变换将所述第一三维点从第一相机坐标系转换到第n相机坐标系,得到第n三维点,包括:
23、所述刚体变换公式为:
24、
25、其中,(x’,y’,z’)为所述第n三维点坐标,所述(r,t)为所述第n相机相对于第一相机的外参;
26、将所述第一三维点坐标输入所述刚体变换公式得到所述第n三维点坐标。
27、在一种实现方式中,所述利用透视投影变换将所述第n三维点转换为第n二维点,包括:
28、所述透视投影变换公式为:
29、
30、其中,kn为第n相机的内参,zcn为第n相机距基座距离,(u’,v’)为第n二维点;
31、将所述第n三维点坐标输入所述透视投影变换公式得到所述第n二维点坐标。
32、在一种实现方式中,所述将所述第n三维点坐标输入所述透视投影变换公式得到所述第n二维点坐标,还包括:
33、将所述第n二维点坐标进行自动标注作为所述第n图像中的自动标注点;
34、判断是否得到n-1个自动标注点,若是,则结束;
35、若否,则重新获取所述自动标注点,直至获得n-1个所述自动标注点。
36、第二方面,本发明提供了一种终端,其特征在于,包括:处理器以及存储器,所述存储器存储有图像自动标注方法程序,所述图像自动标注方法程序被所述处理器执行时用于实现任意一项所述的图像自动标注方法。
37、第三方面,本发明提供了一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有图像自动标注方法程序,所述图像自动标注程序被处理器执行时用于实现任意一项所述的图像自动标注方法。
38、本发明采用上述技术方案具有以下效果:
39、本发明公开了一种图像自动标注方法,其中,方法包括:预先标定相机阵列并建立相机坐标系;获取第一相机拍摄的第一图像中的第一二维点;其中;利用逆透视投影变换将所述第一二维点转换成第一三维点;利用刚体变换将所述第一三维点从所述第一相机坐标系转换到第n相机坐标系,得到第n三维点;利用透视投影变换将所述第n三维点转换为第n二维点;其中,所述第n二维点为第n相机拍摄的第n图像中的点。本发明通过建立相机坐标系以及采用关键点透视投影变换与刚体变换实现自动标注,减少人工调整和改变目标物姿态和位置的工作量,而且不存在漏标注、错误标注的问题,不需要人工进行复核。
技术特征:
1.一种图像自动标注方法,其特征在于,所述图像自动标注方法包括以下步骤:
2.根据权利要求1所述的图像自动标注方法,其特征在于,所述预先标定相机阵列并建立相机坐标系,包括;
3.根据权利要求1所述的图像自动标注方法,其特征在于,所述获取第一相机拍摄的第一图像中的第一二维点,之前包括:
4.根据权利要求1所述的图像自动标注方法,其特征在于,所述获取第一相机拍摄的第一图像中的第一二维点,包括:
5.根据权利要求1所述的图像自动标注方法,其特征在于,所述利用逆透视投影变换将所述第一二维点转换成第一三维点,包括:
6.根据权利要求1所述的图像自动标注方法,其特征在于,所述利用刚体变换将所述第一三维点从第一相机坐标系转换到第n相机坐标系,得到第n三维点,包括:
7.根据权利要求1所述的图像自动标注方法,其特征在于,所述利用透视投影变换将所述第n三维点转换为第n二维点,包括:
8.根据权利要求7所述的图像自动标注方法,其特征在于,所述将所述第n三维点坐标输入所述透视投影变换公式得到所述第n二维点坐标,还包括:
9.一种终端,其特征在于,包括:处理器以及存储器,所述存储器存储有图像自动标注方法程序,所述图像自动标注方法程序被所述处理器执行时用于实现如权利要求1-8中任意一项所述的图像自动标注方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有图像自动标注方法程序,所述图像自动标注程序被处理器执行时用于实现如权利要求1-8中任意一项所述的图像自动标注方法。
技术总结
本发明公开了一种图像自动标注方法,其中,方法包括:预先标定相机阵列并建立相机坐标系;获取第一相机拍摄的第一图像中的第一二维点;其中;利用逆透视投影变换将所述第一二维点转换成第一三维点;利用刚体变换将所述第一三维点从所述第一相机坐标系转换到第N相机坐标系,得到第N三维点;利用透视投影变换将所述第N三维点转换为第N二维点;其中,所述第N二维点为第N相机拍摄的第N图像中的点。本发明通过建立相机坐标系以及采用关键点透视投影变换与刚体变换实现自动标注,减少人工调整和改变目标物姿态和位置的工作量,而且不存在漏标注、错误标注的问题,不需要人工进行复核。
技术研发人员:王兴政,韦国耀,陈松伟,刘杰豪,邓元龙
受保护的技术使用者:深圳大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!