内窥镜操作系统的制作方法
本发明涉及内窥镜,尤其涉及一种内窥镜操作系统。
背景技术:
1、内窥镜是集传统光学、人体工程学、精密机械、现代电子、数学、软件等于一体的检测仪器,其具有图像传感器、光学镜头、光源照明、水气控制等部件。其中医用内窥镜可以经口腔进入胃内或经其他天然孔道进入体内,利用内窥镜可以看到x射线等其它医疗设备不能显示的病变。
2、目前,现有的内窥镜系统采取的主要控制手段为机箱上设置实体按键、触摸屏、外置键盘、内窥镜自带按键等方式。在医用领域中,由于操作者手部在使用内窥镜的过程中会接触到插入部,为了避免交叉感染,操作者无法直接操作位于机箱或外置键盘上的按键,需要助手协助完成,有时由于沟通或者现场的限制使得某些操作无法按照操作者的意愿执行,降低了检查效率和检查效果。
3、专利cn112270982a中公开了一种通过人工智能进行手势识别的系统在手术室中进行一些功能操作的方法。然而此专利中公开的方法更多的是用于完成手术室中的资料及信息查看,并不完全适用内窥镜的操作过程,内窥镜手术进行过程中操作者的手部和内窥镜存在一些遮挡关系,操作者可做出的手势也有很大的局限性。另外上述专利虽然使用了人工智能提高了手势识别的准确度,然而此方法还是被更多的用于不会对手术过程产生实际效果的功能上,究其原因还是无法确保手势识别的准确性和安全性。
技术实现思路
1、本发明提供一种内窥镜操作系统,用以解决现有技术中内窥镜操作系统中手势识别准确性差的缺陷。
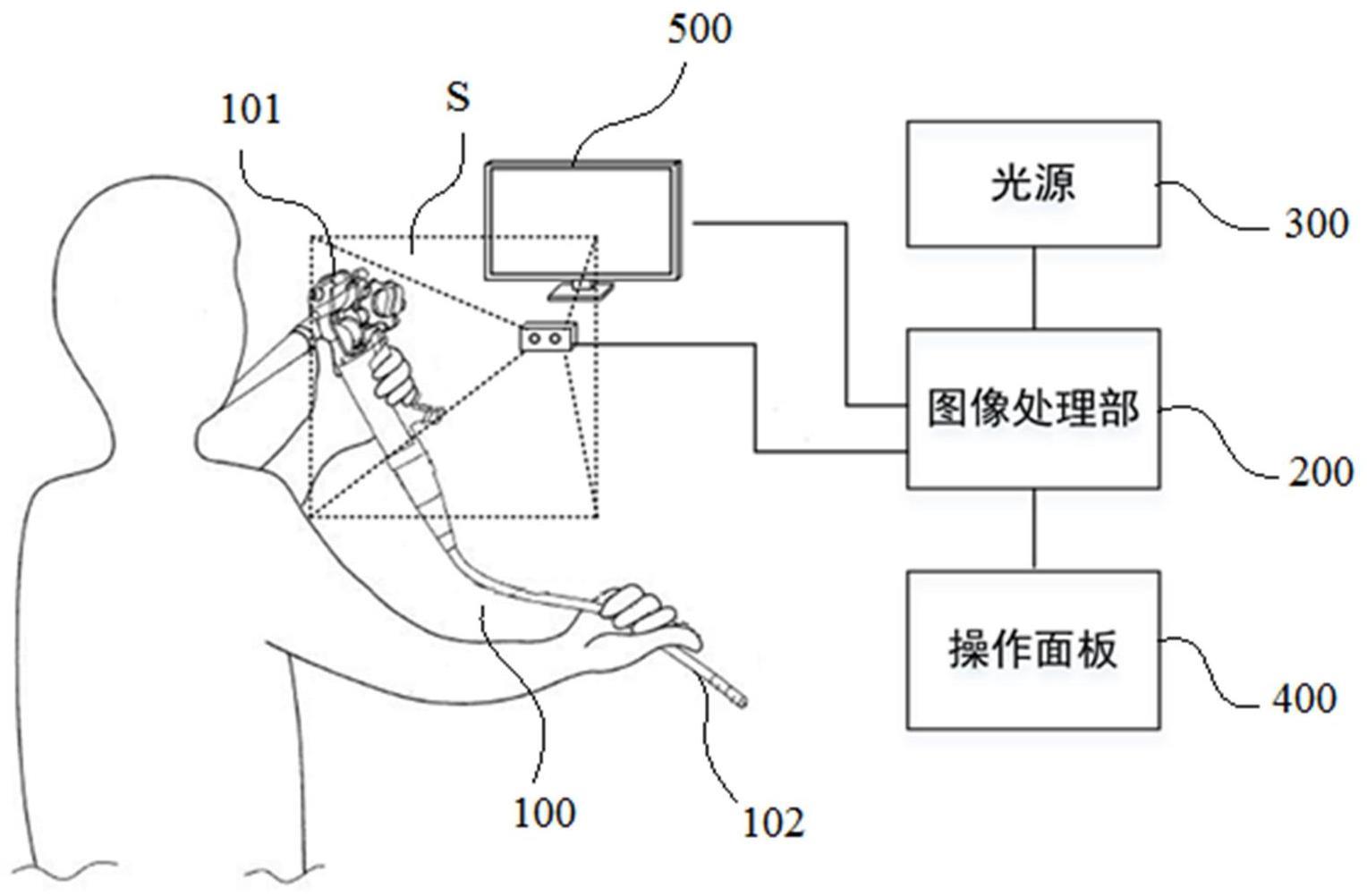
2、本发明提供一种内窥镜操作系统,内窥镜的插入部和操作部为可连接设置,或者相互独立;所述内窥镜操作系统包括:获取装置,用于在操作者操作内窥镜时,获取预设识别对象的空间信息;所述空间信息包括所述预设识别对象的姿态信息和/或位置信息;计算部,与所述获取装置电性连接;所述计算部基于所述空间信息,计算对应的空间特征向量,并识别所述空间特征向量所对应的操作指令;执行部,用于根据所述操作指令,控制内窥镜中的对应装置执行相应的动作。
3、根据本发明提供的一种内窥镜操作系统,所述获取装置包括:所述获取装置包括:源,用于发出入射信号,所述入射信号传递至所述预设识别对象;所述入射信号包括光线,声波或雷达波;接收器,用于接收来自所述预设识别对象的反射信号;处理器,与所述计算部电性连接;所述处理器用于将所述反射信号转变为所述空间信息。
4、根据本发明提供的一种内窥镜操作系统,所述计算部包括:数据转换模块,用于接收所述空间信息,提取出所述预设识别对象的空间位置信息,并将所述空间位置信息归一化为所述空间特征向量;姿态识别模块,用于识别所述空间特征向量所对应的操作指令,并将所述操作指令发送至所述执行部。
5、根据本发明提供的一种内窥镜操作系统,还包括:信息判断部,与所述计算部以及所述执行部电性连接;所述信息判断部用于根据内窥镜当前所处的操作场景信息,判定在当前场景下,所述操作指令是否属于预设动作库中的有效指令集合;或者于内窥镜的显示界面上显示,在当前场景下可被判定为有效指令的预设识别对象的空间信息。
6、根据本发明提供的一种内窥镜操作系统,所述预设识别对象包括操作者的手势动作;所述执行部包括图像处理单元;所述图像处理单元与内窥镜和所述计算部电性连接;所述图像处理单元用于根据接收到的对应于操作者手势的操作指令,对内窥镜拍摄到的图像进行相应处理或显示。
7、根据本发明提供的一种内窥镜操作系统,所述预设识别对象包括操作者的手势动作;所述获取装置通过夹持件夹持于操作者身侧,以从操作者侧的视角正对操作者的手势动作发生区域。
8、根据本发明提供的一种内窥镜操作系统,所述预设识别对象包括操作者的手势动作;所述内窥镜操作系统还包括手套,所述手套设有多个第一感应标识;所述第一感应标识用于标记操作者的手部的各个部位;所述第一感应标识能够被所述获取装置所识别。
9、根据本发明提供的一种内窥镜操作系统,还包括显示器,所述显示器设有交互界面;所述预设识别对象包括操作者的手势动作;所述获取装置用于获取操作者的手部空间信息;所述计算部用于计算操作者的手部与所述显示器之间的距离;在手部与所述显示器之间的距离小于预设值时,所述交互界面适用于触摸操作;在手部与所述显示器之间的距离大于或等于所述预设值时,所述交互界面适用于手势操作。
10、根据本发明提供的一种内窥镜操作系统,所述预设识别对象包括操作者的手势;所述执行部包括设置于内窥镜操作部内的驱动机构;所述驱动机构用于根据对应于操作者手势的所述操作指令,带动内窥镜插入部动作。
11、根据本发明提供的一种内窥镜操作系统,所述预设识别对象包括内窥镜的操作部;操作部上设有可被所述获取装置识别的第二感应标识;所述第二感应标识用于标记所述操作部的空间姿态;所述操作部的转轮上设有可被所述获取装置识别的第三感应标识和第四感应标识;所述计算部用于根据所述第二感应标识、所述第三感应标识和所述第四感应标识之间的相对位置,计算不同转轮的旋转方向和转轮之间的旋转角度;所述执行部包括设置于内窥镜操作部内的驱动机构;所述驱动机构用于根据所述旋转方向和所述旋转角度,带动内窥镜的插入部动作。
12、本发明提供的内窥镜操作系统,通过设置获取装置、计算部和执行部,能够将预设识别对象的空间信息,如操作者的手势动作,内窥镜操作部的姿态等,转化为操作指令,并由执行部实现相应的功能,从而可以替代传统内窥镜操作部上的实体按键,有利于简化内窥镜上操作部手柄结构布局,降低设备的洗消压力;同时,可以不受限于现有实体按键的功能,丰富了可供医生实施的操作,提高了内窥镜操作的便利性。
技术特征:
1.一种内窥镜操作系统,其特征在于,内窥镜的插入部和操作部为可连接设置,或者相互独立;所述内窥镜操作系统包括:
2.根据权利要求1所述的内窥镜操作系统,其特征在于,所述获取装置包括:
3.根据权利要求1所述的内窥镜操作系统,其特征在于,所述计算部包括:
4.根据权利要求1所述的内窥镜操作系统,其特征在于,还包括:
5.根据权利要求1-4中任一项所述的内窥镜操作系统,其特征在于,
6.根据权利要求1-4中任一项所述的内窥镜操作系统,其特征在于,
7.根据权利要求1-4中任一项所述的内窥镜操作系统,其特征在于,
8.根据权利要求1-4中任一项所述的内窥镜操作系统,其特征在于,还包括显示器,所述显示器设有交互界面;
9.根据权利要求1-4中任一项所述的内窥镜操作系统,其特征在于,所述预设识别对象包括操作者的手势;
10.根据权利要求1-4中任一项所述的内窥镜操作系统,其特征在于,
技术总结
本发明涉及内窥镜技术领域,提供一种内窥镜操作系统,内窥镜操作系统包括:获取装置用于在操作者操作内窥镜时,获取预设识别对象的空间信息;空间信息包括预设识别对象的姿态信息和/或位置信息;计算部与获取装置电性连接;计算部基于空间信息计算对应的空间特征向量,并识别空间特征向量所对应的操作指令;执行部用于根据操作指令,控制内窥镜中的对应装置执行相应的动作。上述的内窥镜操作系统,通过设置获取装置、计算部和执行部,能够将操作者的手势动作转化为操作指令,控制执行部实现相应的功能,提高了内窥镜操作的便利性;同时,计算部可计算出手部各个部位的方向向量和法向量,提高了手势识别的精确度。
技术研发人员:任松林
受保护的技术使用者:上海澳华内镜股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!