基于多源数据源的航空器实时位置差值校准方法与流程
本发明涉及一种基于多源数据源的航空器实时位置差值校准方法,属于机场航空器定位校准领域领域。
背景技术:
1、随着我国经济的快速发展,国内航空业发展迅速,机场的航班数量急剧增长,保障任务也越来越繁重。航空器的实时位置是航班最重要的属性之一,准确掌握航班(即航班所使用航空器)的实时位置对于机场的生产运营、航班保障具有重要的作用。如何能够全面、准确、稳定、实时的掌握航空器的位置是一个必须研究和重视的问题。
2、中国专利(申请号cn201910602670.3)公开了一种ads-b航迹清晰与校准装置,包括:建立基于ads-b航迹数据的特征字段的数据样本,其中特征字段包括初始字段以及扩展字段,所述扩展字段通过所述初始字段计算得出;对数据样本进行去重;根据数据样本中的特征字段的数据特点选择特征字段,并用于字段数据异常检测和处理;依据局部遍历的dbscan密度聚类方法对数据样本的特征字段进行离群点识别,判断异常点,对异常点进行修正或删除;根据数据样本中的初始字段对航迹进行校准。使用局部遍历的dbscan密度聚类方法识别离群点,大幅提高清洗效率,通过航迹校准对时间戳进行修正,使整个飞行轨迹符合质点运动学规律。
3、由于机场的生产运营和航班保障都是基于动态航班数据进行的,静态的数据处理和校准显然不能满足机场的日常运行需要。因此该专利客观上可以起到一定的航空器位置校准的指导作用,但是对于实时航班位置的校准没有作用。并且,单一数据源的位置数据在应用上存在一定的缺陷。若ads-b设备失效或者信号丢失,那么将会失去航空器的位置信息,这对于极其重视生产安全的民航业来讲是不可接受的。综上所述,现有技术中对于如何进行航空器实时位置的定位以及如何保证定位的准确、稳定、可持续问题,没有给出可靠明确的答案。
技术实现思路
1、为克服现有技术的缺陷,本发明提供一种基于多源数据源的航空器实时位置差值校准方法,本发明的技术方案是:
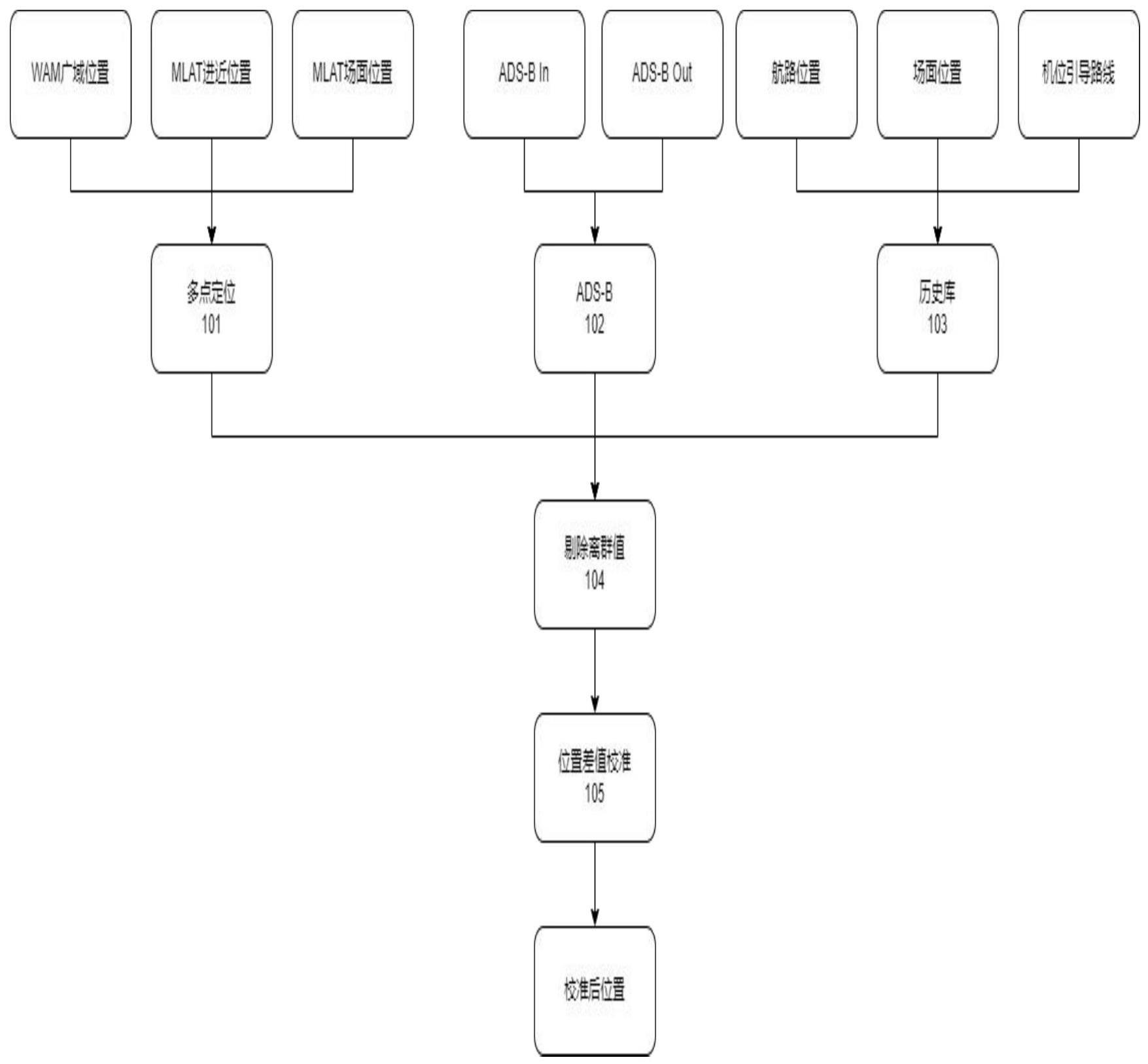
2、一种基于多源数据源的航空器实时位置差值校准方法,包括:(1)通过多源数据进行航空器实时位置获取;(2)剔除高群值;(3)进行位置差值校准;(4)得到校准后的位置。
3、所述的步骤(1)具体为:基于多点定位的航空器实时位置获取、基于ads-b的航空器实时位置获取和/或基于历史数据库的航空器实时位置推断。
4、所述基于多点定位系统获取航空器的实时位置具体为:借助机场多点定位设施发送的航空器位置信息,确定航空器的具体位置;其中,广域多点定位系统发送航空器的航路位置,平行进近系统发送进近位置,场面监视系统发送场面位置;所述的广域多点定位系统和平行进近系统数据的组合运用,帮助用户确认航空器的空地实时位置。
5、所述基于ads-b获取航空器获取航空器在空中的实时位置,具体为:ads-b以每秒一次的频率向其它航空器或者地面站报告飞机位置,通过接入ads-b广播报文,并解析报文数据,实时获取航空器的当前位置信息。
6、所述基于历史数据库推断航空器的实时位置数据具体为:通过将历史数据进行入库保留,形成航空器的历史位置数据表,通过该数据表的历史数据,获取某航班、某航线或者跑道与机位之间的历史行进路线,进而推断航空器当前的位置。
7、所述的步骤(3)具体为:借助多源数据差值校准方法,修正航班的具体位置,综合多点定位系统、ads-b、历史位置数据库返回的航空器位置数据,计算的航空器位置差值。
8、所述的步骤(3)具体为:
9、(3-1)首先判断获取的坐标数据是否在可控误差范围之内,如果某数据源的位置数据与其他多个数据存在误差,则认为该位置数据不准确,应当丢弃;具体检测方法基于巴依达准则,即:顺序排列数据组的数据值,计算平均值x和标准差s,测算每个数据与平均值x的差值是否大于标准差s的3倍,如果大于标准差的3倍,则认为该值是离群值,予以剔除;否则为正常数据;
10、(3-2)处理多源数据的航空器位置坐标,对于输入的每一组航空器坐标位置数据,首先需要对位置进行结构拆分,将坐标对拆解为经度、纬度和高度;将多点定位、ads-b和历史库数据的经度数据分组,最终形成包含三种定位数据中经度数据的数组;同样的方法处理纬度和高度数据;
11、(3-3)对经度、纬度、高度数据进行差值校准;对于经度而言,将经度数据的数组划分为3个数据为一组的partion,由于文中样本仅有三组数据,因此划分出的pation数量为1,将每一个partion的中位数定义为pivot,对于每一个partion,使用插入排序寻找中位数;如果partion的数量为1,那么,找到的中位数即为目标值;若partion的数量大于1,则产生的多个中位数重复上述步骤,进行递归,直至剩下一个数字,即为pivot;将数组中大于pivot的数字放置到pivot的左侧,小于它的放置到右侧;判断pivot位置与[元素总数/2]的大小,有选择地对左侧或者右侧递归;最终得到最优的经度,同理操作纬度和高度数据,得到最优的纬度和高度数据。
12、在所述的步骤(1)中,当多源数据中的一项或者多项无法获取时,使用其它的数据源作为备用数据。
13、所述的步骤(2)具体为:所述的多源数据弥补了单一数据源存在的坐标准确度问题;计算位置数据源的平均值下x及标准差s,当多个位置数据的标准差s大于0.0000015时,则认为该点的位置数据中存在误差过大的数据源,即离群值;计算数据源中每个数据与平均值x的差值是否大于3倍的标准差s,若大于三倍的标准差,则认为该值为离群值,将之剔除,否则认为是正常数据。
14、本发明的优点是:基于多点定位、ads-b、航空器历史位置库,通过无线链路及各定位技术的专用频段信号,完成数据的输入。基于bfptr算法和巴依达离群值检验准则,完成整个位置数据的差值校验。这一方法将有效的降低航空器位置获取的不稳定性,提高位置数据的精度,进而提升了整个机场运行的安全性和机组保障的准确率,有利于机场更加合理的规划和利用资源,提高整体协同作业水平和生产效率。
技术特征:
1.一种基于多源数据源的航空器实时位置差值校准方法,其特征在于,包括:(1)通过多源数据进行航空器实时位置获取;(2)剔除高群值;(3)进行位置差值校准;(4)得到校准后的位置。
2.根据权利要求1所述的基于多源数据源的航空器实时位置差值校准方法,其特征在于,所述的步骤(1)具体为:基于多点定位的航空器实时位置获取、基于ads-b的航空器实时位置获取和/或基于历史数据库的航空器实时位置推断。
3.根据权利要求2所述的基于多源数据源的航空器实时位置差值校准方法,其特征在于,所述基于多点定位系统获取航空器的实时位置具体为:借助机场多点定位设施发送的航空器位置信息,确定航空器的具体位置;其中,广域多点定位系统发送航空器的航路位置,平行进近系统发送进近位置,场面监视系统发送场面位置;所述的广域多点定位系统和平行进近系统数据的组合运用,帮助用户确认航空器的空地实时位置。
4.根据权利要求2所述的基于多源数据源的航空器实时位置差值校准方法,其特征在于,所述基于ads-b获取航空器获取航空器在空中的实时位置,具体为:ads-b以每秒一次的频率向其它航空器或者地面站报告飞机位置,通过接入ads-b广播报文,并解析报文数据,实时获取航空器的当前位置信息。
5.根据权利要求2所述的基于多源数据源的航空器实时位置差值校准方法,其特征在于,所述基于历史数据库推断航空器的实时位置数据具体为:通过将历史数据进行入库保留,形成航空器的历史位置数据表,通过该数据表的历史数据,获取某航班、某航线或者跑道与机位之间的历史行进路线,进而推断航空器当前的位置。
6.根据权利要求2所述的基于多源数据源的航空器实时位置差值校准方法,其特征在于,所述的步骤(3)具体为:借助多源数据差值校准方法,修正航班的具体位置,综合多点定位系统、ads-b、历史位置数据库返回的航空器位置数据,计算的航空器位置差值。
7.根据权利要求2所述的基于多源数据源的航空器实时位置差值校准方法,其特征在于,所述的步骤(3)具体为:
8.根据权利要求6所述的基于多源数据源的航空器实时位置差值校准方法,其特征在于,在所述的步骤(1)中,当多源数据中的一项或者多项无法获取时,使用其它的数据源作为备用数据。
9.根据权利要求7所述的基于多源数据源的航空器实时位置差值校准方法,其特征在于,所述的步骤(2)具体为:所述的多源数据弥补了单一数据源存在的坐标准确度问题;计算位置数据源的平均值下x及标准差s,当多个位置数据的标准差s大于0.0000015时,则认为该点的位置数据中存在误差过大的数据源,即离群值;计算数据源中每个数据与平均值x的差值是否大于3倍的标准差s,若大于三倍的标准差,则认为该值为离群值,将之剔除,否则认为是正常数据。
技术总结
本发明涉及一种基于多源数据源的航空器实时位置差值校准方法,包括:(1)通过多源数据进行航空器实时位置获取;(2)剔除高群值;(3)进行位置差值校准;(4)得到校准后的位置。本发明的优点是:基于多点定位、ADS‑B、航空器历史位置库,通过无线链路及各定位技术的专用频段信号,完成数据的输入。基于BFPTR算法和巴依达离群值检验准则,完成整个位置数据的差值校验。这一方法将有效的降低航空器位置获取的不稳定性,提高位置数据的精度,进而提升了整个机场运行的安全性和机组保障的准确率,有利于机场更加合理的规划和利用资源,提高整体协同作业水平和生产效率。
技术研发人员:王星火,耿雪,王天飞,单义升,尹磊,杜建国,张辉,刘晓疆
受保护的技术使用者:青岛民航凯亚系统集成有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!