实时倒影去除方法、装置、电子设备及可读存储介质与流程
本申请涉及光学检测,特别是涉及实时倒影去除方法、装置、电子设备及可读存储介质。
背景技术:
1、在机器人控制领域,尤其是移动机器人的移动控制,当其运行在瓷砖等光滑地面时,地面上的物体会在光滑地面形成倒影,使得移动机器人上的相机所拍摄的图像出现地面以下的倒影成像而错误判断前方有跌落风险不能进行正确的导航运动规划。因此在机器人运行过程中对地面倒影的实时准确去除十分重要。
2、在现有技术中,主要是利用神经网络训练检测模型对图像进行倒影的识别和去除。通过识别图像的倒影区域映射到深度图,也可以去除深度图中的倒影。但是倒影的成像不一定与实体完全对称,且倒影成像不清晰,利用神经网络训练往往不能取得很好的结果。同时,这种方式对计算资源的要求高,不适用部署到计算资源比较紧张的机器人上。
技术实现思路
1、本申请至少提供实时倒影去除方法、装置、电子设备及可读存储介质,用于解决现有技术中的上述问题。
2、本申请第一方面提供了一种实时倒影去除方法,该实时倒影去除方法包括:
3、获取深度相机实时采集的点云数据,并将点云数据分割为正向点云、地面点云以及负向点云;
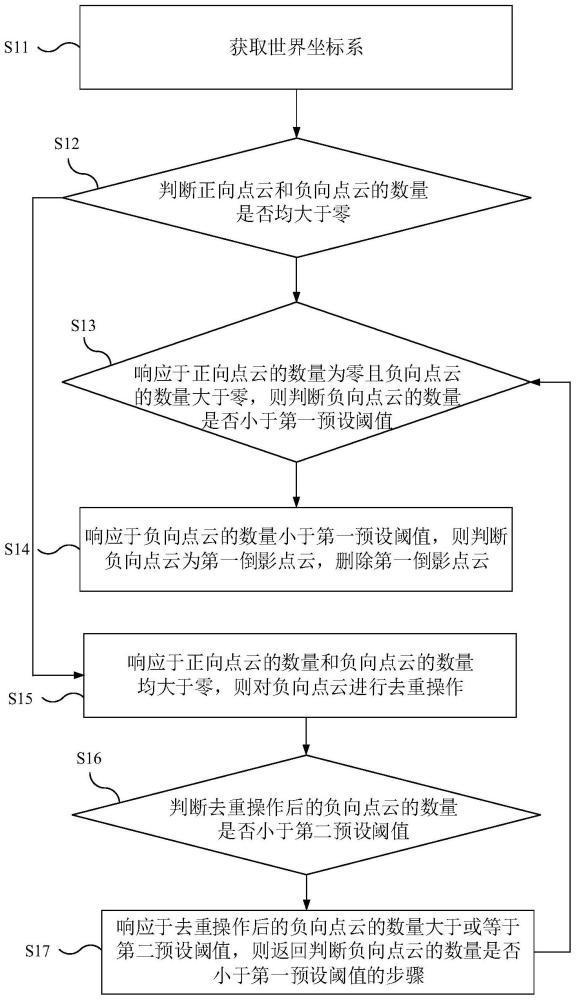
4、判断正向点云和负向点云的数量是否均大于零;
5、响应于正向点云的数量为零且负向点云的数量大于零,则判断负向点云的数量是否小于第一预设阈值;
6、响应于负向点云的数量小于第一预设阈值,则判断负向点云为第一倒影点云,删除第一倒影点云;
7、响应于正向点云的数量和负向点云的数量均大于零,则对负向点云进行去重操作;
8、判断去重操作后的负向点云的数量是否小于第二预设阈值;
9、响应于去重操作后的负向点云的数量大于或等于第二预设阈值,则返回判断负向点云的数量是否小于第一预设阈值的步骤。
10、可选地,将点云数据分割为正向点云、地面点云以及负向点云的步骤,包括:
11、获取世界坐标系;其中,世界坐标系包括正向高度平面和负向高度平面;
12、计算点云数据在世界坐标系下的高度;
13、响应于点云数据的高度大于正向高度平面,则将点云数据定义为正向点云;
14、响应于点云数据的高度小于负向高度平面,则将点云数据定义为负向点云;
15、响应于点云数据的高度小于或等于正向高度平面,且大于或等于负向高度平面,则将点云数据定义为地面点云。
16、可选地,判断负向点云的数量是否小于第一预设阈值的步骤,包括:
17、响应于负向点云的数量大于或等于第一预设阈值,则对负向点云进行半径滤波;
18、获取剩余的负向点云,判断剩余的负向点云的数量是否小于第一预设阈值;
19、响应于剩余的负向点云的数量大于或等于第一预设阈值,则判断剩余的负向点云为真实点云;
20、响应于剩余的负向点云的数量小于第一预设阈值,则判断剩余的负向点云为第二倒影点云,删除第二倒影点云。
21、可选地,对负向点云进行半径滤波的步骤,包括:
22、基于每个负向点云的预设半径生成对应的检测领域;其中,所有负向点云的预设半径相等;
23、获取检测领域内的负向点云的数量,并判断检测领域内的负向点云的数量是否小于第三预设阈值;
24、响应于检测领域内的负向点云的数量小于第三预设阈值,则将检测领域对应的负向点云定义为噪声点,删除噪声点。
25、可选地,在对负向点云进行去重操作的步骤之前,包括:
26、基于点云数据的采样密度确定预设分辨率;
27、基于预设分辨率对正向点云和负向点云进行体素降采样。
28、可选地,正向点云包括至少一个正向点云点,负向点云包括至少一个负向点云点;基于预设分辨率对正向点云和负向点云进行体素降采样的步骤,包括:
29、基于预设分辨率建立三维体素栅格,以使每个三维体素栅格包括至少一个正向点云点和/或至少一个负向点云点;
30、计算三维体素栅格中的所有正向点云点和/或所有负向点云点的坐标加权平均值,将坐标加权平均值作为对应三维体素栅格的点云坐标值;其中,具有点云坐标值的点云点作为新的正向点云点或负向点云点。
31、可选地,对负向点云进行去重操作的步骤,包括:
32、创建哈希表和哈希函数;
33、基于哈希函数计算所有新的正向点云点和所有新的负向点云点的哈希地址;
34、响应于存在具有相同哈希地址的新的正向点云点和新的负向点云点,将新的负向点云点定义为第三倒影点云,删除第三倒影点云。
35、本申请第二方面提供了一种实时倒影去除装置,该实时倒影去除装置包括:
36、获取模块,用于获取深度相机实时采集的点云数据,并将点云数据分割为正向点云、地面点云以及负向点云;
37、执行模块,用于判断正向点云和负向点云的数量是否均大于零;响应于正向点云的数量为零且负向点云的数量大于零,判断负向点云的数量是否小于第一预设阈值;响应于负向点云的数量小于第一预设阈值,则判断负向点云为第一倒影点云,删除第一倒影点云;响应于正向点云的数量和负向点云的数量均大于零,则对负向点云进行去重操作;判断去重操作后的负向点云的数量是否小于第二预设阈值;响应于去重操作后的负向点云的数量大于或等于第二预设阈值,则返回判断负向点云的数量是否小于第一预设阈值的操作。
38、本申请第三方面提供了一种电子设备,该电子设备包括相互耦接的存储器和处理器,处理器用于执行存储器中存储的程序指令,以实现如上述的实时倒影去除方法。
39、本申请第四方面提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,计算机程序能够被处理器执行时实现如上述的实时倒影去除方法。
40、本申请的有益效果是:区别于现有技术,本申请通过深度相机实时采集点云数据并对点云数据进行分类分割,根据正向点云和负向点云的数量的不同,即可实现对地面倒影的实时准确去除。同时,本申请还设置有第一预设阈值和第二预设阈值,实现对负向点云的数量进行准确判断,提高对地面倒影的准确判断,以实现对地面倒影的实时准确去除。
41、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本申请。
技术特征:
1.一种实时倒影去除方法,其特征在于,包括:
2.根据权利要求1所述的实时倒影去除方法,其特征在于,所述将所述点云数据分割为正向点云、地面点云以及负向点云的步骤,包括:
3.根据权利要求1所述的实时倒影去除方法,其特征在于,所述判断所述负向点云的数量是否小于第一预设阈值的步骤,包括:
4.根据权利要求3所述的实时倒影去除方法,其特征在于,所述对所述负向点云进行半径滤波的步骤,包括:
5.根据权利要求1所述的实时倒影去除方法,其特征在于,在对所述负向点云进行去重操作的步骤之前,包括:
6.根据权利要求5所述的实时倒影去除方法,其特征在于,所述正向点云包括至少一个正向点云点,所述负向点云包括至少一个负向点云点;所述基于所述预设分辨率对所述正向点云和所述负向点云进行体素降采样的步骤,包括:
7.根据权利要求6所述的实时倒影去除方法,其特征在于,所述对所述负向点云进行去重操作的步骤,包括:
8.一种实时倒影去除装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括相互耦接的存储器和处理器,所述处理器用于执行所述存储器中存储的程序指令,以实现如权利要求1-7中任一项所述的实时倒影去除方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序能够被处理器执行时实现如权利要求1-7中任一项所述的实时倒影去除方法。
技术总结
本申请公开了实时倒影去除方法、装置、电子设备及可读存储介质,该实时倒影去除方法包括:获取深度相机实时采集的点云数据,并将点云数据分割为正向点云、地面点云以及负向点云;响应于正向点云的数量为零且负向点云的数量大于零,且响应于负向点云的数量小于第一预设阈值,则判断负向点云为第一倒影点云,删除第一倒影点云;响应于正向点云的数量和负向点云的数量均大于零,则对负向点云进行去重操作;响应于去重操作后的负向点云的数量大于或等于第二预设阈值,则返回判断负向点云的数量是否小于第一预设阈值的步骤。本申请通过实时获取点云数据并进行分类分割,通过判断正向点云和负向点云的数量的不同,实现对地面倒影的实时准确去除。
技术研发人员:曹军
受保护的技术使用者:广州视源电子科技股份有限公司
技术研发日:
技术公布日:2024/6/23
- 还没有人留言评论。精彩留言会获得点赞!