一种小型无人机载SAR图像配准方法
本发明涉及图像配准的,具体涉及一种小型无人机载sar图像配准方法。
背景技术:
1、图像配准(image registration)就是将不同时间、不同传感器(成像设备)或不同条件下(天候、照度、摄像位置和角度等)获取的两幅或多幅图像进行匹配、叠加的过程,它已经被广泛地应用于遥感数据分析、计算机视觉、图像处理等领域。
2、图像配准是多航过差分干涉形变测量的重要组成部分,其准确性直接影响干涉处理的结果,进而影响形变测量的精度。现有的配准方法实现步骤可分为粗配准和精配准,均以相关系数等衡量配准精度的指标为准则,在主图像中设置窗口大小为的匹配窗,在辅图像中以同样坐标位置的像元中心,设置一个窗口大小为搜索窗,按行列式逐像素选取与匹配窗大小一致的对应窗,分别计算匹配窗与各对应窗的配准指标值,取其中匹配指标值最大的对应窗为匹配窗配准的窗口,主图像的匹配窗中心与辅图像中对应窗中心像元的坐标位置差即为偏移量。该类方法成功运用于星载/机载sar图像配准等领域,但是由于需要逐像素匹配,配准过程极其耗时,因而在实际运用中具有局限性。
3、因此,针对上述sar图像配准方法耗时严重等问题,本专利提出了一种快速的小型无人机载sar图像配准方案,可极大的缩短sar图像配准时间,提高多航过差分干涉sar形变测量的实时性。
技术实现思路
1、针对现有技术中所存在的不足,本发明提供了一种小型无人机载sar图像配准方法,以解决现有技术中sar图像配准方法耗时严重的问题。
2、本发明提供了一种小型无人机载sar图像配准方法,包括:
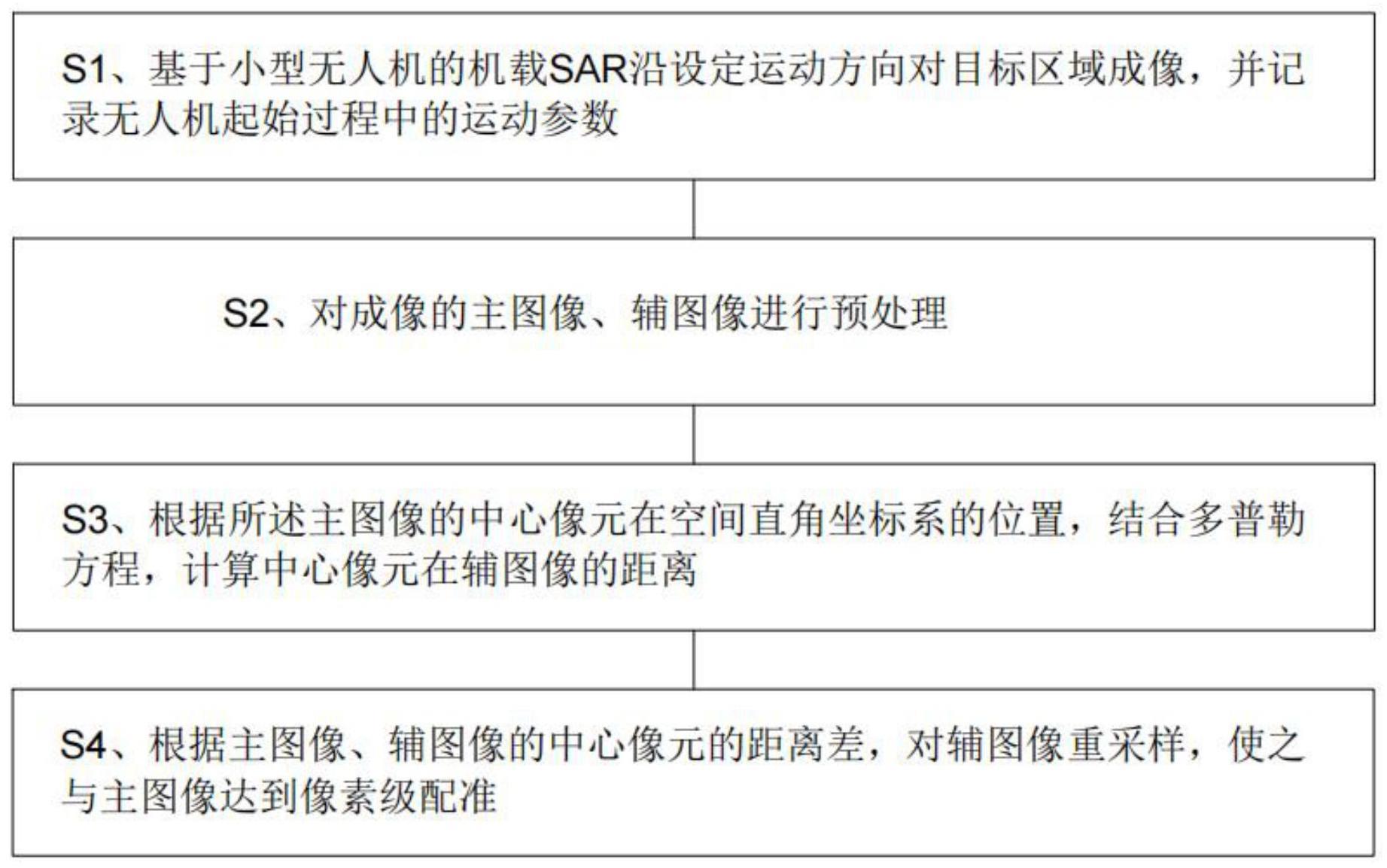
3、s1、基于小型无人机的机载sar沿设定运动方向对目标区域成像,并记录无人机起始过程中的运动参数;
4、s2、对成像的主图像、辅图像进行预处理;
5、s3、根据所述主图像的中心像元在空间直角坐标系的位置,结合多普勒方程,计算中心像元在辅图像的距离;
6、s4、根据主图像、辅图像的中心像元的距离差,对辅图像沿着距离向重采样,使之与主图像在距离向上像素级配准。
7、可选地,所述并记录无人机起始过程中的运动参数,包括:
8、记录所述sar起始采样的经度和纬度。
9、可选地,所述对成像的主图像、辅图像进行预处理,包括:
10、将无人机其中一个运动轨迹的起点和终点拟合成第一直线轨迹l1,另外一个运动轨迹的起点和终点拟合成第二直线轨迹l2,并分别计算第一直线轨迹l1的斜率k1和第二直线轨迹l2的斜率k2,通过k1和k2计算l1和l2的夹角θ,可表示为:
11、
12、以辅图像中心像元为旋转轴心,主、辅图像运动轨迹夹角θ为旋转角,旋转辅图像,可校正主、辅图像间的旋转。
13、可选地,所述根据所述主图像的中心像元在空间直角坐标系的位置,结合多普勒方程,计算中心像元在辅图像的距离,包括:
14、构建距离的多普勒方程,表示为:
15、
16、其中,(xs,ys,zs)和(x,y,z)分别表示天线相位中心和目标区域的地面目标在空间直角坐标系下的三维坐标,r表示目标与天线相位中心间的瞬时距离,可表示为r=r0+m·δr,其中r0表示参考距离,m表示主图像中心像元的距离向坐标,δr表示主图像两像素点之间的距离差;(vx,vy,vz)表示小型无人机的瞬时速度;fd表示无人机的瞬时多普勒频率;λ表示雷达波长;re表示地球赤道半径;rp=(1-1/f)(re+h)表示级轴半径,f为平坦因子;h表示相对假设模型的局部地域高度,根据所述地面目标区域的平均海拔确定h的值;
17、将所述多普勒方程整理为:
18、
19、对所述式(2)未知参量(x,y,z)按泰勒级数展开,取至少一次项,采用迭代算法,设第k次迭代时的目标位置为(xk,yk,zk),所述式(2)线性化后的误差方程可表示为:
20、ε=aδ+l (3)
21、其中,ε表示误差,
22、
23、其中,
24、
25、δ=dx dy dz为所述地面目标坐标修正值;l=df0 df1 df2t为常数项矢量;
26、其中,
27、
28、由最小二乘法求坐标修正值δ,使得εtε最小,坐标修正值δ可表示为
29、δ=-(ata)-1atl (7)
30、将修正值加上xk,yk,zk得
31、
32、循环迭代直到方程解的误差εtε小于给定限差为止,得到地面目标的坐标,根据所述地面目标的坐标,结合多普勒方程计算中心像元在辅图像的距离。
33、可选地,所述对辅图像重采样,使之与主图像达到像素级配准,包括:
34、对主、辅图像作升采样处理,且将主图像均匀分为n个子块,以子块中心像元坐标为原点,选定大小尺寸为5*5的数据块作为匹配窗;以辅图像中对应中心像元的坐标为原点,选定大小尺寸为129*129的搜索窗,将匹配窗和搜索窗逐像素搜索匹配,以相关系数为匹配指标,完成n个中心像元的位移量偏移计算。利用n个子块中心像元的坐标和偏移量,采用二阶多项式拟合方法计算主、辅图像的坐标转换关系,完成精配准。
35、相比于现有技术,本发明具有如下有益效果:
36、在本专利中,基于小型无人机机载的sar沿设定运动方向对目标区域成像,对成像的主图像、辅图像进行预处理,根据所述主图像的中心像元在空间直角坐标系的位置,结合多普勒方程,计算中心像元在辅图像的距离;并根据主图像、辅图像的中心像元的距离差,对辅图像沿着距离向重采样,使之与主图像在距离向上像素级配准。相比于现有技术中的图像配准,本发明通过sar快速获取目标区域的主图像和辅图像,对图像进行处理并计算,并辅图像沿着距离向重采样,使之与主图像在距离向上像素级配准,缩短了sar图像配准时间。
技术特征:
1.一种小型无人机载sar图像配准方法,其特征在于,包括:
2.根据权利要求1所述的小型无人机载sar图像配准方法,其特征在于,所述并记录无人机起始过程中的运动参数,包括:
3.根据权利要求2所述的小型无人机载sar图像配准方法,其特征在于,所述对成像的主图像、辅图像进行预处理,包括:
4.根据权利要求3所述的小型无人机载sar图像配准方法,其特征在于,所述根据所述主图像的中心像元在空间直角坐标系的位置,结合多普勒方程,计算中心像元在辅图像的距离,包括:
5.根据权利要求4所述的小型无人机载sar图像配准方法,其特征在于,所述对辅图像重采样,使之与主图像达到像素级配准,包括:
技术总结
本发明提供了一种小型无人机载SAR图像配准方法,包括:S1、基于小型无人机的机载SAR沿设定运动方向对目标区域成像,并记录无人机起始过程中的运动参数;S2、对成像的主图像、辅图像进行预处理;S3、根据所述主图像的中心像元在空间直角坐标系的位置,结合多普勒方程,计算中心像元在辅图像的距离;S4、根据主图像、辅图像的中心像元的距离差,对辅图像重采样,使之与主图像达到像素级配准。本发明通过无人机机载的SAR快速获取目标区域的主图像和辅图像,对图像进行处理并计算,并辅图像沿着距离向重采样,使之与主图像在距离向上像素级配准,极大的缩短SAR图像配准时间,提高多航过差分干涉SAR形变测量的实时性。
技术研发人员:杨志军,田卫明,刘飞峰,董锡超
受保护的技术使用者:北京理工大学重庆创新中心
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!