一种驾驶相似度计算方法和装置
本发明属于自动驾驶,尤其涉及一种综合考虑单一车辆运动信息与车辆所处的多车位置拓扑信息的驾驶相似度计算方法和装置。
背景技术:
1、自动驾驶车辆具有丰富的历史,最早出现在20世纪80年代,在过去的四十年里得到了飞速的发展。自动驾驶车辆搭载先进的传感系统、智能控制系统与精准的执行系统,具备在一定交通环境下智能感知、自主决策和精准执行等功能,以实现安全、舒适、高效和节能的自动驾驶。
2、自动驾驶的飞速发展使得其对安全、效率等方面的要求也逐步提升。快速、高效、可靠的计算模型能够为自动驾驶提供有力的支撑。随着世界各地交通能力的发展,自然驾驶数据集大量涌现,为自动驾驶领域计算模型的建立提供了真实的数据支撑。且此类数据集所涉及的数据类型能够便利地从自动驾驶车辆所搭载的传感系统获取。
3、获得与基准车辆、基准驾驶行为相同、相似的车辆及其行为数据,能够用以提升自动驾驶的决策准确性和控制稳定性。此外,此类数据还能够应用于车辆行驶风险预测模型,用来提升驾驶安全。
4、专利cn113902022a公开了一种自动驾驶场景数据样本相似度获取方法。该方法基于余弦相似度,将待度量的两个目标放入新的坐标系中计算相似度,用以避免共线但相距较远的问题。但余弦相似性度量仅表征线性相关程度,而无法刻画非线性特性,且未考虑两被度量目标的关键影响因素。
5、专利cn110969844a公开了一种基于车辆行车数据的相似度计算方法。该发明通过将采集的车辆行车数据与已有的行车数据输入训练好的模型获得两组数据的相似度,用于检测车辆被盗情况。但该发明仅考虑了行车过程中,车辆自身的状态,未考虑环境对车辆状态的影响。
6、目前,已有的车辆驾驶行为相似度计算模型缺少对车辆自身信息及其所处环境信息的综合考虑,未挖掘与驾驶行为关系密切的影响因素,使得所得相似度可信度不高。因此,亟需建立深入的驾驶行为相似度计算模型,融入影响车辆执行一驾驶行为的关键因素,以达到提升车辆决策、控制等模块的效率和准确性的同时提升自动驾驶的安全性。
技术实现思路
1、本发明要解决的技术问题是,提供一种综合考虑单一车辆运动信息与车辆所处的多车位置拓扑信息的驾驶相似度计算方法和装置。
2、为实现上述目的,本发明采用如下的技术方案
3、一种驾驶相似度计算方法,包括以下步骤:
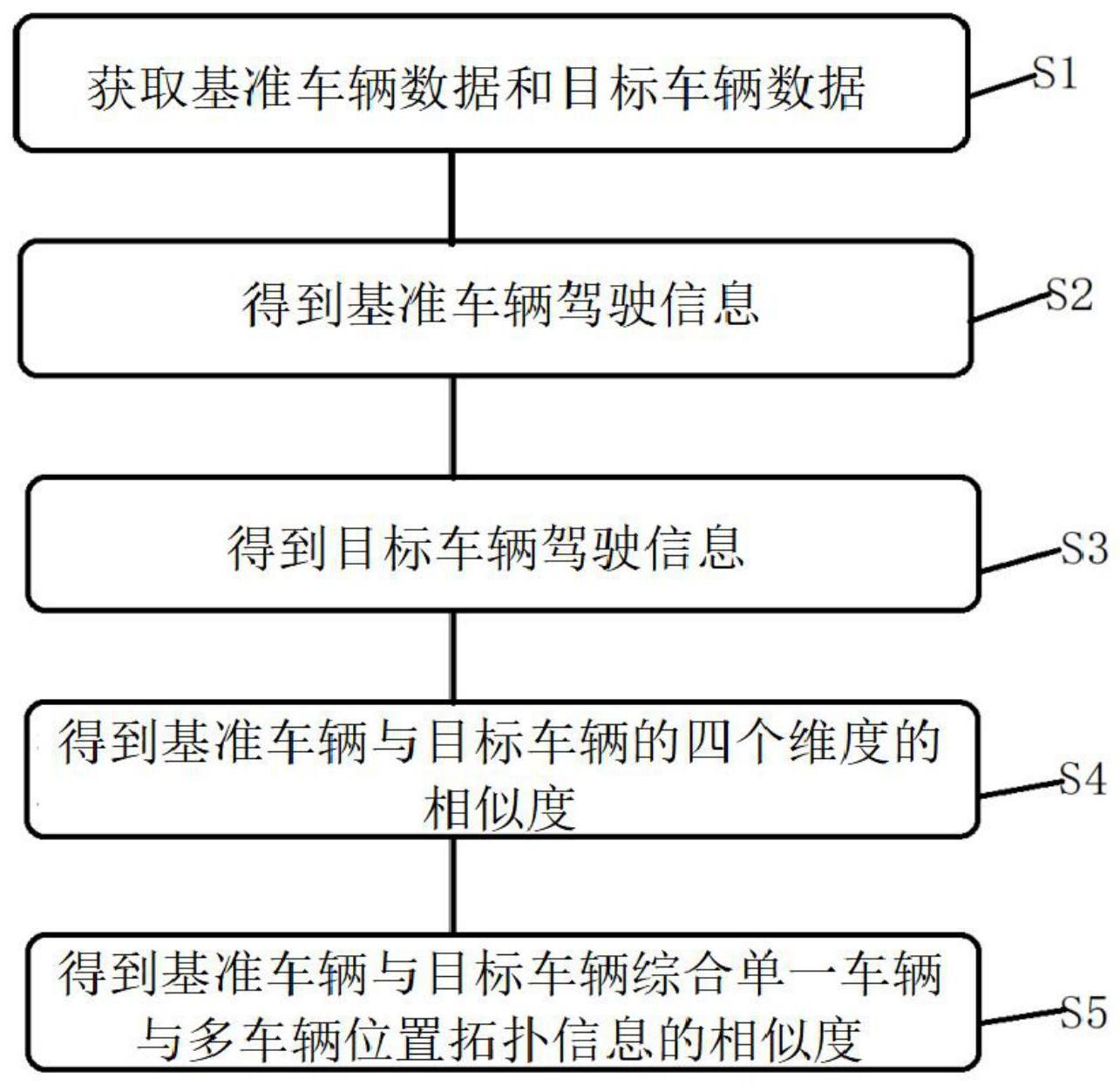
4、步骤s1、获取基准车辆数据和目标车辆数据;
5、步骤s2、根据所述基准车辆数据中基准车辆所处位置信息、所处多车位置拓扑信息、单一车辆的运动状态信息,得到基准车辆驾驶信息;
6、步骤s3、根据所述目标车辆数据中目标车辆所处位置信息、所处多车位置拓扑信息、单一车辆的运动状态信息,得到目标车辆驾驶信息;
7、步骤s4、根据基准车辆驾驶信息和目标车辆驾驶信息,得到基准车辆与目标车辆的所处位置相似度、所处多车位置拓扑结构相似度、拓扑属性相似度和运动状态相似度;
8、步骤s5、根据所述所处位置相似度、所处多车位置拓扑结构相似度、拓扑属性相似度和运动状态相似度,得到基准车辆与目标车辆综合单一车辆与多车辆位置拓扑信息的相似度。
9、作为优选,步骤s1中,根据驾驶行为,从自然驾驶数据集中提取执行该行为的车辆数据,作为基准车辆数据。
10、作为优选,步骤s1中,以基准车辆的行驶位置和时间为条件,从非基准车辆数据中获取位置相近且时间相近的车辆数据作为目标车辆数据。
11、作为优选,步骤s5基准车辆与目标车辆综合单一车辆与多车辆位置拓扑信息的相似度计算公式为:
12、
13、本发明还提供一种驾驶相似度计算装置,包括以下步骤:
14、获取模块,用于获取基准车辆数据和目标车辆数据;
15、第一处理模块,用于根据所述基准车辆数据中基准车辆所处位置信息、所处多车位置拓扑信息、单一车辆的运动状态信息,得到基准车辆驾驶信息;
16、第二处理模块,根据所述目标车辆数据中目标车辆所处位置信息、所处多车位置拓扑信息、单一车辆的运动状态信息,得到目标车辆驾驶信息;
17、第一计算模块,用于根据基准车辆驾驶信息和目标车辆驾驶信息,得到基准车辆与目标车辆的所处位置相似度、所处多车位置拓扑结构相似度、拓扑属性相似度和运动状态相似度;
18、第二计算模块,用于根据所述所处位置相似度、所处多车位置拓扑结构相似度、拓扑属性相似度和运动状态相似度,得到基准车辆与目标车辆综合单一车辆与多车辆位置拓扑信息的相似度。
19、作为优选,所述获取模块中,根据驾驶行为从自然驾驶数据集中提取执行该行为的车辆数据作为基准车辆数据。
20、作为优选,所述获取模块中,以基准车辆的行驶位置和时间为条件从非基准车辆数据中获取位置相近且时间相近的车辆数据作为目标车辆数据。
21、作为优选,所述第二计算模块中,基准车辆与目标车辆综合单一车辆与多车辆位置拓扑信息的相似度计算公式为:
22、
23、本发明的考虑单车运动信息与所处多车拓扑信息的驾驶相似度计算方法综合度量了与车辆行为密切相关的自车运动状态,以及影响车辆行为的驾驶环境信息。本发明能够为自动驾驶领域中寻找与基准车辆具有相似行为的目标车辆提供有力工具。本发明分析逻辑清晰,泛化能力强,所用数据采集便利,可扩展应用于驾驶决策、车辆安全控制等多个领域。
技术特征:
1.一种驾驶相似度计算方法,其特征在于,包括以下步骤:
2.如权利要求1所述的驾驶相似度计算方法,其特征在于,步骤s1中,根据驾驶行为,从自然驾驶数据集中提取执行该行为的车辆数据,作为基准车辆数据。
3.如权利要求2所述的驾驶相似度计算方法,其特征在于,步骤s1中,以基准车辆的行驶位置和时间为条件,从非基准车辆数据中获取位置相近且时间相近的车辆数据作为目标车辆数据。
4.如权利要求3所述的驾驶相似度计算方法,其特征在于,步骤s5基准车辆与目标车辆综合单一车辆与多车辆位置拓扑信息的相似度计算公式为:
5.一种驾驶相似度计算装置,其特征在于,包括以下步骤:
6.如权利要求5所述的驾驶相似度计算装置,其特征在于,所述获取模块中,根据驾驶行为从自然驾驶数据集中提取执行该行为的车辆数据作为基准车辆数据。
7.如权利要求6所述的驾驶相似度计算装置,其特征在于,所述获取模块中,以基准车辆的行驶位置和时间为条件从非基准车辆数据中获取位置相近且时间相近的车辆数据作为目标车辆数据。
8.如权利要求7所述的驾驶相似度计算装置,其特征在于,所述第二计算模块中,基准车辆与目标车辆综合单一车辆与多车辆位置拓扑信息的相似度计算公式为:
技术总结
本发明公开一种驾驶相似度计算方法和装置,包括:获取基准车辆数据和目标车辆数据;根据基准车辆所处位置信息、所处多车位置拓扑信息、单一车辆的运动状态信息,得到基准车辆驾驶信息;根据目标车辆所处位置信息、所处多车位置拓扑信息、单一车辆的运动状态信息,得到目标车辆驾驶信息;根据基准车辆驾驶信息和目标车辆驾驶信息,得到基准车辆与目标车辆的所处位置相似度、所处多车位置拓扑结构相似度、拓扑属性相似度和运动状态相似度;根据上述所述相似度,得到基准车辆与目标车辆综合单一车辆与多车辆位置拓扑信息的相似度。采用本发明的技术方案,可以实现综合考虑单一车辆运动信息与车辆所处的多车位置拓扑信息的驾驶相似度计算。
技术研发人员:黄平,丁海涛,张建伟,陈虹
受保护的技术使用者:吉林大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!