测量头部扫描方向的方法和计算机设备与流程
本技术涉及成像扫描,特别是涉及一种测量头部扫描方向的方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、随着医疗影像设备的发展,医生可以通过医学影像进行疾病的筛查和诊断,比如通过切片式的扫描技术(如断层扫描、mri),对脑部疾病进行定位和诊断。
2、患者在接受头部切片式的扫描时,需要测量实际的头部扫描方向是否与听眦线平面平行,以避免影响医生的正常阅片诊断。而测量实际的头部扫描方向时,通常依赖人工处理,测量效率低下。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种测量头部扫描方向的方法、装置、计算机设备、存储介质和计算机程序产品。
2、本技术提供一种测量头部扫描方向的方法,所述方法包括:
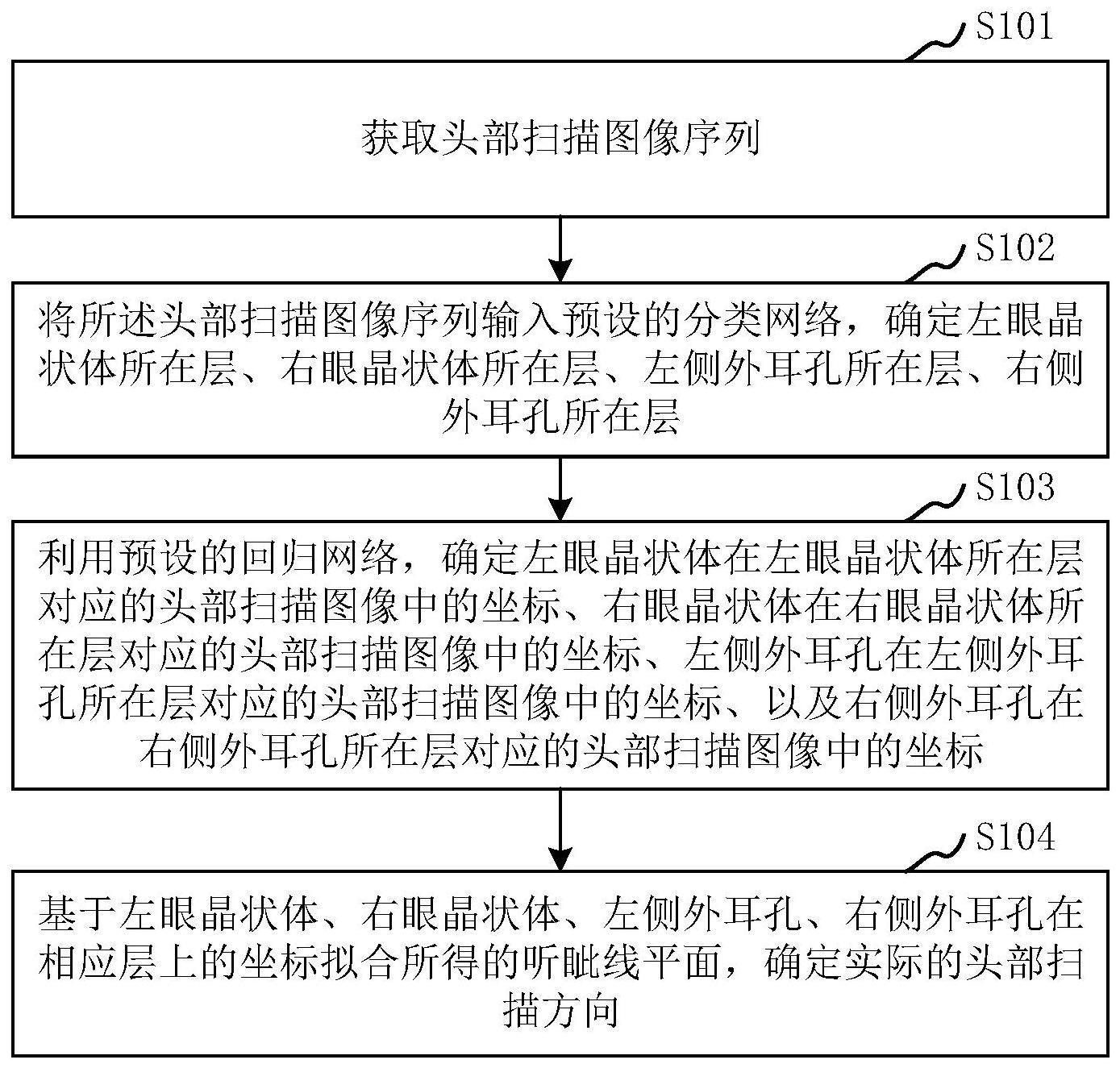
3、获取头部扫描图像序列;所述头部扫描图像序列包括多层图像;
4、将所述头部扫描图像序列输入预设的分类网络,确定左眼晶状体所在层、右眼晶状体所在层、左侧外耳孔所在层、右侧外耳孔所在层;
5、利用预设的回归网络,确定左眼晶状体在左眼晶状体所在层对应的头部扫描图像中的坐标、右眼晶状体在右眼晶状体所在层对应的头部扫描图像中的坐标、左侧外耳孔在左侧外耳孔所在层对应的头部扫描图像中的坐标、以及右侧外耳孔在右侧外耳孔所在层对应的头部扫描图像中的坐标;
6、基于左眼晶状体、右眼晶状体、左侧外耳孔、右侧外耳孔在相应层上的坐标拟合所得的听眦线平面,确定实际的头部扫描方向。
7、在一个实施例中,在确定实际的头部扫描方向之后,所述方法还包括:
8、获取实际的头部扫描方向和标准的头部扫描方向之间的夹角;
9、根据所述夹角的大小,确定实际的头部扫描方向是否异常。
10、在一个实施例中,所述根据所述夹角的大小,确定头部扫描方向是否异常,包括:
11、比较所述夹角相较于设定阈值的大小;
12、若比较结果表征所述夹角大于所述设定阈值,则确定头部扫描方向异常;
13、若比较结果表征所述夹角小于所述设定阈值,则确定头部扫描方向正常。
14、在一个实施例中,所述将所述头部扫描图像序列输入预设的分类网络,确定左眼晶状体所在层、右眼晶状体所在层、左侧外耳孔所在层、右侧外耳孔所在层,包括:
15、将所述头部扫描图像序列输入预设的分类网络;所述分类网络包括四个输出通道;四个输出通道对应的部位分别为:左眼晶状体、右眼晶状体、左侧外耳孔和右侧外耳孔;
16、获取每个输出通道给出的概率值序列;其中,每个概率值序列包括多个概率值;
17、在每个输出通道给出的概率值序列中,确定每个输出通道给出的最大概率值;
18、将每个输出通道给出的最大概率值对应的头部扫描图像的所在层,作为每个输出通道对应的部位所在层,以确定左眼晶状体所在层、右眼晶状体所在层、左侧外耳孔所在层、右侧外耳孔所在层。
19、在一个实施例中,利用预设的回归网络,确定左眼晶状体在左眼晶状体所在层对应的头部扫描图像中的坐标,包括:
20、经所述回归网络里与左眼晶状体对应的输出通道,得到所述头部扫描图像序列里各头部扫描图像的回归坐标;
21、根据所述分类网络的结果,在各头部扫描图像的回归坐标中,确定与左眼晶状体所在层对应的头部扫描图像的回归坐标,并作为左眼晶状体在左眼晶状体所在层对应的头部扫描图像中的坐标。
22、在一个实施例中,经所述回归网络里与左眼晶状体对应的输出通道,得到所述头部扫描图像序列里各头部扫描图像的回归坐标,包括:
23、经所述回归网络里与左眼晶状体对应的输出通道,得到多个热力图;
24、根据各热力图的质心,得到各头部扫描图像上的回归坐标。
25、在一个实施例中,在将所述头部扫描图像序列输入预设的分类网络,确定左眼晶状体所在层、右眼晶状体所在层、左侧外耳孔所在层、右侧外耳孔所在层之前,所述方法还包括:
26、获取训练样本图像序列;所述训练样本图像序列中,左眼晶状体所在层对应的训练样本图像、右眼晶状体所在层对应的训练样本图像、左侧外耳孔所在层对应的训练样本图像、以及右侧外耳孔所在层对应的训练样本图像均为阳性标签,其他训练样本图像为阴性标签;
27、将携带有相应标签的训练样本图像序列,输入待训练分类网络,得到包括四个输出通道的分类网络。
28、在一个实施例中,在获取训练样本图像序列之后,所述方法还包括:
29、针对左眼晶状体所在层对应的训练样本图像、右眼晶状体所在层对应的训练样本图像、左侧外耳孔所在层对应的训练样本图像、以及右侧外耳孔所在层对应的训练样本图像,以相应部位在训练样本图像上的坐标为中心,向外膨胀生成热力图,并作为对待训练回归网络进行训练所用的标注数据。
30、在一个实施例中,获取训练样本图像序列,包括:
31、获取待处理训练样本图像序列;
32、利用骨窗视角和脑窗视角,对所述待处理训练样本图像序列进行视角处理,并进行灰度值归一化;
33、沿头部扫描图像序列的z轴方向,对视角处理以及灰度值归一化处理后的所述待处理训练样本图像序列进行连续帧的抽取,得到训练样本图像序列。
34、在一个实施例中,在基于左眼晶状体、右眼晶状体、左侧外耳孔、右侧外耳孔在相应层上的坐标拟合所得的听眦线平面,确定实际的头部扫描方向之前,所述方法还包括:
35、利用线性回归或者矩阵求逆的方式,对左眼晶状体、右眼晶状体、左侧外耳孔、右侧外耳孔在相应层上的坐标进行拟合,得到空间平面;
36、将所述空间平面作为拟合所得的听眦线平面。
37、本技术提供一种测量头部扫描方向的装置,所述装置包括:
38、头部扫描图像获取模块,用于获取头部扫描图像序列;所述头部扫描图像序列包括多层图像;
39、分类模块,用于将所述头部扫描图像序列输入预设的分类网络,确定左眼晶状体所在层、右眼晶状体所在层、左侧外耳孔所在层、右侧外耳孔所在层;
40、回归模块,用于利用预设的回归网络,确定左眼晶状体在左眼晶状体所在层对应的头部扫描图像中的坐标、右眼晶状体在右眼晶状体所在层对应的头部扫描图像中的坐标、左侧外耳孔在左侧外耳孔所在层对应的头部扫描图像中的坐标、以及右侧外耳孔在右侧外耳孔所在层对应的头部扫描图像中的坐标;
41、头部扫描方向确定模块,用于基于左眼晶状体、右眼晶状体、左侧外耳孔、右侧外耳孔在相应层上的坐标拟合所得的听眦线平面,确定实际的头部扫描方向。
42、本技术提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行上述方法。
43、本技术提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行上述方法。
44、本技术提供一种计算机程序产品,其上存储有计算机程序,所述计算机程序被处理器执行上述方法。
45、上述测量头部扫描方向的方法、装置、计算机设备、存储介质和计算机程序产品中,获取包括多层图像的头部扫描图像序列后,将该头部扫描图像序列输入预设的分类网络,确定左眼晶状体所在层、右眼晶状体所在层、左侧外耳孔所在层、右侧外耳孔所在层;并且,利用预设的回归网络,确定左眼晶状体在左眼晶状体所在层对应的头部扫描图像中的坐标、右眼晶状体在右眼晶状体所在层对应的头部扫描图像中的坐标、左侧外耳孔在左侧外耳孔所在层对应的头部扫描图像中的坐标、以及右侧外耳孔在右侧外耳孔所在层对应的头部扫描图像中的坐标,基于左眼晶状体、右眼晶状体、左侧外耳孔、右侧外耳孔在相应层上的坐标拟合所得的听眦线平面,确定实际的头部扫描方向。本技术基于人工智能(artificial intelligence),利用预设的分类网络和回归网络,对头部扫描图像序列进行关键层分类和关键点坐标回归,从而拟合得到听眦线平面,自动测量实际的头部扫描方向,无需人工介入,提高测量实际的头部扫描方向的效率;并且,在拟合得到听眦线平面时,利用四个部位对应的坐标,也即:左眼晶状体、右眼晶状体、左侧外耳孔和右侧外耳孔各自在相应所在层的头部扫描图像中的坐标,相较于利用其中三个部位对应的坐标而言,可以使拟合所得的听眦线平面更能反映实际的头部扫描方向,提高实际的头部扫描方向的测量准确性。
- 还没有人留言评论。精彩留言会获得点赞!