一种地下金属矿环境感知方法及系统与流程
本发明涉及智能采矿应用领域,尤其涉及一种地下金属矿环境感知方法及系统。
背景技术:
1、现有的金属矿开采作业大多依赖人工,由于矿山环境相对恶劣,地下作业存在较大安全隐患。且金属矿地下作业环境相对复杂,缺乏有效的环境感知手段,导致作业装置运行效率较低,如何增强矿山作业环境感知,为设备作业提供稳定可靠的感知数据成为当前亟需解决的难题。
技术实现思路
1、鉴于以上现有技术存在的问题,本发明提出一种地下金属矿环境感知方法及系统,主要解决现有金属矿开采缺乏有效的环境感知手段,作业效率低且存在安全隐患的问题。
2、为了实现上述目的及其他目的,本发明采用的技术方案如下。
3、本申请提供一种地下金属矿环境感知方法,包括:
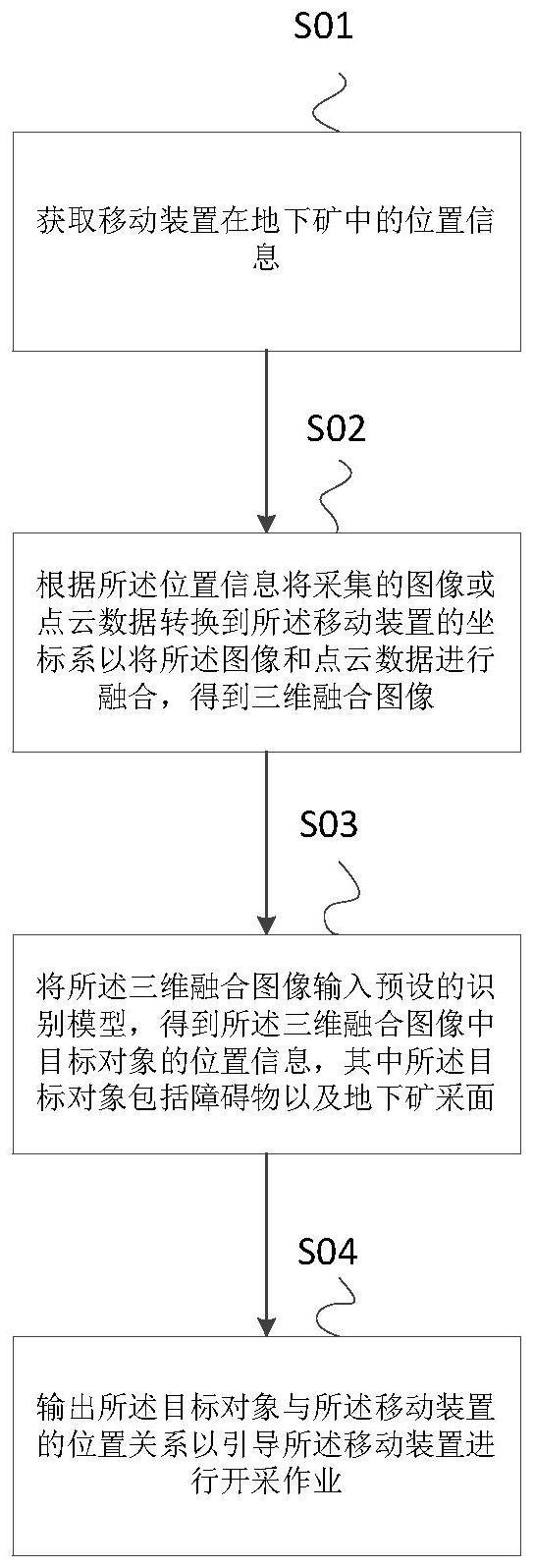
4、获取移动装置在地下矿中的位置信息;
5、根据所述位置信息将采集的图像或点云数据转换到所述移动装置的坐标系以将所述图像和点云数据进行融合,得到三维融合图像;
6、将所述三维融合图像输入预设的识别模型,得到所述三维融合图像中目标对象的位置信息,其中所述目标对象包括障碍物以及地下矿采面;
7、输出所述目标对象与所述移动装置的位置关系以引导所述移动装置进行开采作业。
8、在本申请一实施例中,获取移动装置在地下矿中的位置信息,包括:
9、通过预先设置于所述移动装置上的图像采集模块和点云采集模块获取对应的图像和点云数据;
10、根据预先设置于所述移动装置上的惯性导航单元获取所述移动装置的航向角;
11、根据所述图像、点云数据和所述航向角对所述移动装置进行位姿估计,得到所述移动装置的位置信息。
12、在本申请一实施例中,根据所述位置信息将采集的图像或点云数据转换到所述移动装置的坐标系以将所述图像和点云数据进行融合,包括:
13、根据所述图像采集模块的预设位置参数确定所述图像采集模块与所述移动装置的第一相对位置;
14、根据所述点云采集模块的预设位置参数确定所述点云采集模块与所述移动装置的第二相对位置;
15、根据所述第一相对位置以及所述图像采集模块的预设第一内参矩阵将所述图像采集模块采集的图像转换到移动装置的坐标系中,得到第一图像;
16、根据搜书第二相对位置以及所述点云采集模块的预设第二内参矩阵将所述点云采集模块采集的点云数据转换到所述移动装置的坐标系中,得到第一点云;
17、将所述第一图像和所述第一点云进行融合得到,三维融合图像。
18、在本申请一实施例中,得到三维融合图像之后,还包括:
19、将三维融合图像中的地下矿地面数据滤除,剩余的三维融合图像用于进行目标对象识别。
20、在本申请一实施例中,将所述三维融合图像输入预设的识别模型,得到所述三维融合图像中目标对象的位置信息之后,还包括:
21、根据识别得到的地下矿开采面位置信息提取所述三维融合图像中地下矿开采面图像;
22、根据所述地下矿开采面图像进行曲面拟合,得到地下矿开采面的曲面信息以引导后续采矿作业。
23、本申请还提供一种地下金属矿环境感知系统,包括:
24、移动装置本体;
25、数据采集模块,设置于所述移动装置本体上,用于采集所述移动装置移动过程中环境图像和点云数据;
26、定位模块,设置与所述移动装置本体上,用于根据所述环境图像和点云数据确定所述移动装置的位置信息;
27、数据融合模块,设置与所述移动装置本体上,用于根据所述位置信息将采集的图像或点云数据转换到所述移动装置的坐标系以将所述图像和点云数据进行融合,得到三维融合图像;
28、识别模块,设置于所述移动装置本体上,用于将所述三维融合图像输入预设的识别模型,得到所述三维融合图像中目标对象的位置信息,其中所述目标对象包括障碍物以及地下开采面;
29、数据输出模块,设置与所述移动装置本体上,用于输出所述目标对象与所述移动装置的位置关系以引导所述移动装置进行开采作业。
30、在本申请一实施例中,所述数据采集模块包括:激光雷达、光学相机、红外相机以及惯性导航单元。
31、如上所述,本申请提供一种地下金属矿感知方法及系统,具有以下有益效果。
32、本申请通过对移动装置进行定位,并基于移动装置行驶过程中地下矿环境的图像和点云数据进行融合后识别障碍物信息以及地下矿开采面信息,有利于后续移动装置移动避障,顺利高效的完成开采作业。
技术特征:
1.一种地下金属矿环境感知方法,其特征在于,包括:
2.根据权利要求1所述的地下金属矿环境感知方法,其特征在于,获取移动装置在地下矿中的位置信息,包括:
3.根据权利要求2所述的地下金属矿环境感知方法,其特征在于,根据所述位置信息将采集的图像或点云数据转换到所述移动装置的坐标系以将所述图像和点云数据进行融合,包括:
4.根据权利要求3述的地下金属矿环境感知方法,其特征在于,得到三维融合图像之后,还包括:
5.根据权利要求1所述的地下金属矿环境感知方法,其特征在于,将所述三维融合图像输入预设的识别模型,得到所述三维融合图像中目标对象的位置信息之后,还包括:
6.一种地下金属矿环境感知系统,其特征在于,包括:
7.根据权利要求1所述的地下金属矿环境感知系统,其特征在于,所述数据采集模块包括:激光雷达、光学相机、红外相机以及惯性导航单元。
技术总结
本申请提供一种地下金属矿环境感知方法及系统,包括:获取移动装置在地下矿中的位置信息;根据所述位置信息将采集的图像或点云数据转换到所述移动装置的坐标系以将所述图像和点云数据进行融合,得到三维融合图像;将所述三维融合图像输入预设的识别模型,得到所述三维融合图像中目标对象的位置信息,其中所述目标对象包括障碍物以及地下矿采面;输出所述目标对象与所述移动装置的位置关系以引导所述移动装置进行开采作业。
技术研发人员:陈开,何立,袁针云,汪枳昕,石清庆
受保护的技术使用者:中冶赛迪技术研究中心有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!