一种锚链清洗机器人运动状态估计方法
本发明属于水下机器人运动状态估计,涉及一种锚链清洗机器人姿态估计方法,通过神经网络模型,学习其姿态数据,对运动状态做出估计。
背景技术:
1、海洋平台系泊系统的定期表面海生物清理是平台运维中的重要工作。海生物附着会加大锚链结构受力,削弱锚链的支撑能力,其分泌物会加快钢结构腐蚀。根据作业区安全保障要求以及船级社强制要求,水下锚链要定期进行清洗工作。由于水下环境复杂,锚链清洗需要设计专用机器人完成作业,此类机器人在水下是强耦合、强非线性的,故其控制精度是保证机器人正常工作的关键,姿态估计作为控制过程中的重要任务,旨在从传感器中获得数据,定位出机器人的关键点,帮助控制系统调整机器人运动姿态
2、目前,锚链清洗机器人姿态估计面临的主要挑战是建模困难,因为设计的清洗机器人是多体的,其运动具有较强的非线性、非平稳特性,由于没有精确的数学模型支撑,使用传统姿态估计方法得到的结果误差较大,因此亟需一种通过学习时序数据的姿态估计方法。
3、神经网络模型在各个领域取得了优异的性能,以循环神经网络为主的rnn、lstm、gru模型在时序数据中拥有强大学习能力,在各个基准测试中,此类模型皆取得很好拟合结果,但是在锚链清洗机器人姿态估计中还很少使用此类方法进行预测。
技术实现思路
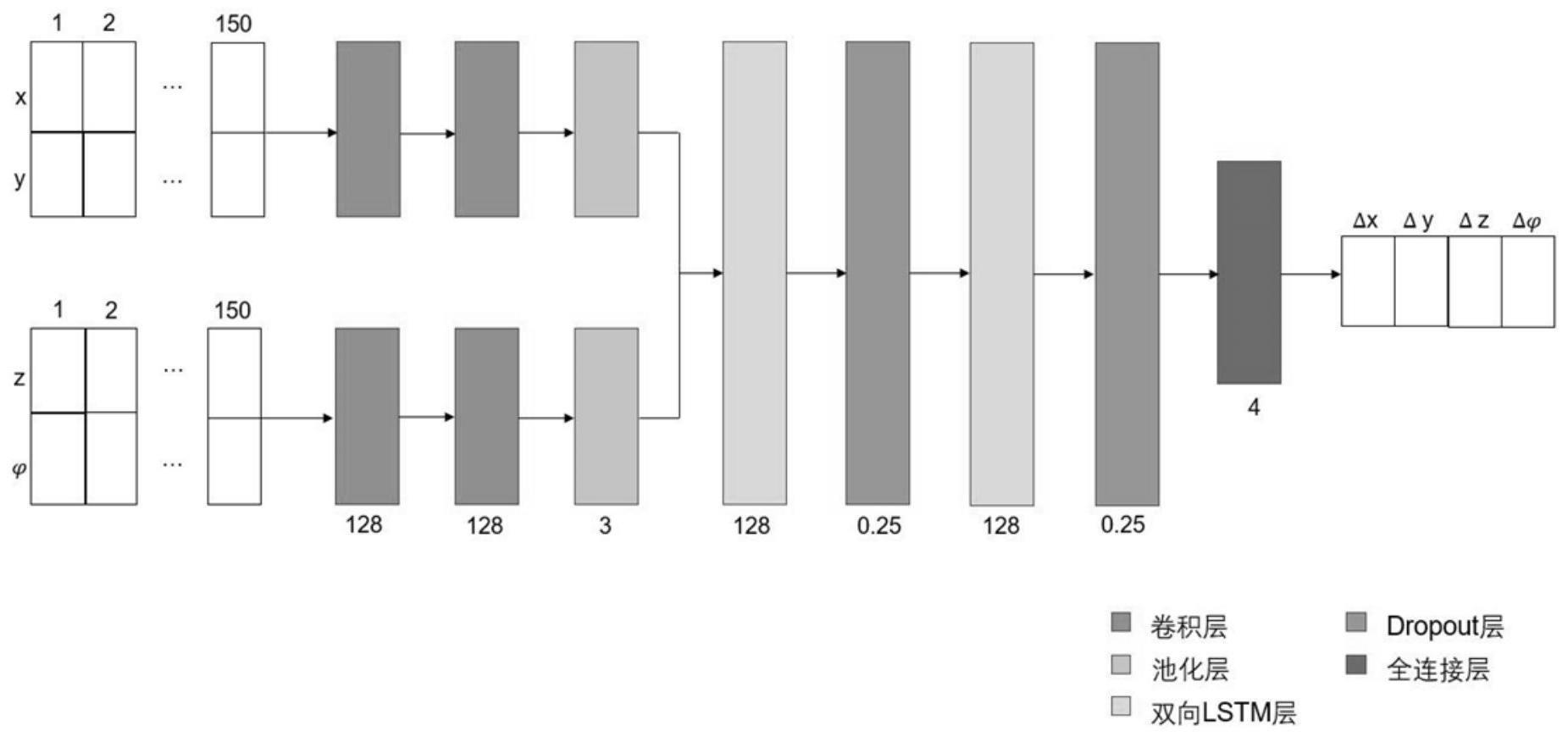
1、本发明的目的在于克服传统姿态估计方法的缺点,提供一种锚链清洗机器人运动状态估计方法是一种使用神经网络模型的锚链清洗机器人姿态估计方法,实现机器人作业中高效、精确的姿态估计,将cnn网络与lstm网络结合,设计一种混合结构cnn-bilstm网络模型,通过使用卷积神经网络(cnn)对输入姿态信息做特征提取,结合双向长短期记忆(lstm)网络学习特征之间的时序信息,双向lstm结合了过去及未来的姿态信息,有效提高姿态估计的准确性。
2、本发明是通过以下技术方案实现的:
3、一种锚链清洗机器人运动状态估计方法,具体包括如下步骤:
4、(1)数据集构建:构建锚链清洗机器人运动姿态数据集,将数据集划分为训练集、测试集;
5、(2)cnn特征提取:对输入数据进行初始化处理,再将处理的数据输入到模型中的卷积层,输出提取的特征向量;
6、(3)池化:将步骤(2)得到的特征向量进行池化;将提取的特征图展平为一个长向量;
7、(4)lstm特征提取:将步骤(3)池化后的特征输入到lstm模块中进行进一步的时间特征学习;
8、(5)dropout层:在双向lstm层之后添加0.25的dropout层,训练过程中,对于神经网络训练单元,按照一定的概率将其从网络中移除,防止模型过拟合,提高模型的泛化能力;
9、(6)输出层:对经过卷积处理后的特征向量和经过双向lstm网络处理后的特征向量进行拼接,完成特征拼接,再通过全连接层将每一个结点都与上一层的所有结点相连,用来把前边提取到的特征综合起来,得到一个具体的数值,将预测结果输出,与真实值比较。
10、作为本发明的进一步技术方案,步骤(2)中的cnn模块使用两个卷积层和一个最大池化层,第一个卷积层读取输入数据,并将结果映射到特征图上,第二个卷积层在第一层的基础上执行相同操作,卷积层中对数据特征的提取主要依赖于卷积核,其计算过程为:
11、
12、其中为第k-1层的第i个特征图的输出值;为第k层第j个特征图与第k-1层第i个特征图之间的卷积核;为第k层的第j个特征图的偏置;cj为输入的特征图的集合;为第k层的第j个特征图的输出值;*表示卷积计算;f(·)为激活函数,选择relu函数。
13、作为本发明的进一步技术方案,步骤(3)所述的池化操作,采用类似的逐步平移方式扫描卷积层输出的特征图,依次捕获过滤器内的最大值,从而缩减数据规模,降低模型复杂度,通过多个卷积层和池化层的交替堆叠,可以更好地提取数据的深层特征。
14、作为本发明的进一步技术方案,步骤(4)的lstm模块,采用双向lstm层,即bilstm,包含一个前向lstm和一个反向lstm,能够捕捉未来和过去的数据特征,lstm网络它由四个部分组成:一个存储单元、一个输入门、一个遗忘门和一个输出门,输入门控制进入存储单元的输入流,输出门决定了此记忆单元输出的内容,遗忘门接收来自上一时刻隐藏层的输出(ht-1)和当前时刻输入(xt)并决定遗弃哪部分信息,根据上述分析,在t时刻,三个门的状态和输入状态如下:
15、
16、
17、
18、
19、其中,it是输入门,ft是遗忘门,ot是输出门,是状态输入,是输入xt到门之间的权重矩阵,是上一隐藏层的输出到门之间的权重矩阵,b.是指输入到三个门之间的偏差向量,σ指的是神经网络的激活函数,进而求出输出状态ct和隐藏层状态ht:
20、
21、ht=ot·tanh(ct)。
22、有益效果:本发明与传统方法相比,本技术方案使用神经网络模型对姿态数据进行学习,提取其时间、空间特征,不受数学模型影响,高效、精确的实现锚链清洗机器人姿态预测,解决了水下非线性运动状态估计的问题。
技术特征:
1.一种锚链清洗机器人运动状态估计方法,其特征在于,具体包括如下步骤:
2.根据权利要求1所述的一种锚链清洗机器人运动状态估计方法,其特征在于,步骤(2)中的cnn模块使用两个卷积层和一个最大池化层,第一个卷积层读取输入数据,并将结果映射到特征图上,第二个卷积层在第一层的基础上执行相同操作,卷积层中对数据特征的提取主要依赖于卷积核,其计算过程为:
3.根据权利要求1所述的一种锚链清洗机器人运动状态估计方法,其特征在于,步骤(3)所述的池化操作,采用类似的逐步平移方式扫描卷积层输出的特征图,依次捕获过滤器内的最大值,从而缩减数据规模,降低模型复杂度,通过多个卷积层和池化层的交替堆叠,可以更好地提取数据的深层特征。
4.根据权利要求1所述的一种锚链清洗机器人运动状态估计方法,其特征在于,步骤(4)的lstm模块,采用双向lstm层,即bilstm,包含一个前向lstm和一个反向lstm,能够捕捉未来和过去的数据特征,lstm网络它由四个部分组成:一个存储单元、一个输入门、一个遗忘门和一个输出门,输入门控制进入存储单元的输入流,输出门决定了此记忆单元输出的内容,遗忘门接收来自上一时刻隐藏层的输出(ht-1)和当前时刻输入(xt)并决定遗弃哪部分信息,根据上述分析,在t时刻,三个门的状态和输入状态如下:
技术总结
本发明公开了一种锚链清洗机器人姿态估计方法,针对锚链清洗机器人多体结构、数学建模误差比较大的特点,提出了一种混合结构CNN‑BiLSTM网络模型,通过使用卷积神经网络(CNN)对输入姿态信息做特征提取,结合双向长短期记忆(LSTM)网络学习特征之间的时序信息,双向LSTM结合了过去及未来的姿态信息,成功进行了仿真实验,得到结果表明,CNN‑BiLSTM网络模型比传统基于数学建模的扩展卡尔曼滤波算法的精度更高,故此网络模型高效的实现了锚链清洗机器人水下作业时姿态估计,解决了水下非线性运动状态估计的问题。
技术研发人员:王彪,陈春昊,姜哲,茆忠俊
受保护的技术使用者:上海海洋大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!