一种基于深度学习和轮廓规则化的遥感影像建筑提取方法与流程
本发明属于光学遥感技术应用领域,具体涉及一种基于深度学习和轮廓规则化的遥感影像建筑提取方法。
背景技术:
1、建筑提取是自然保护地人类活动提取、生态保护红线划定和耕地非农化等工作中的重要一环。传统建筑提取方法多采用人工实地测量或基于无人机影像人工勾画,对工作人员数量依赖较大,且效率低下,无法在城镇建设发展、国土空间规划等众多场景中满足对建筑信息的大区域、高频次更新的要求。
2、随着影像分辨率不断提升,图像中建筑的特征和轮廓信息也越加明显,卫星遥感数据常用在建筑分析工作中来。深度学习技术的发展为建筑自动化提取提供了技术基础,卷积神经网络可高效地提取和学习遥感影像中的地物特征,并通过训练得到自动化建筑提取模型。但此类自动化方法提取得到的建筑轮廓与实际差别较大,常呈现过分割或欠分割现象,为满足实用性需求,需要对结果进行优化,然而优化结果并不理想,优化后的建筑轮廓与建筑实际轮廓边缘仍存在较大差异。
技术实现思路
1、针对现有的技术深度学习技术的遥感影像建筑提取方法存在的提取得到的建筑轮廓与实际差别较大,提取结果优化不理想,导致提取精度低的问题,本发明提供一种基于深度学习和轮廓规则化的遥感影像建筑提取方法。
2、为解决上述问题,本发明采取如下的技术方案:
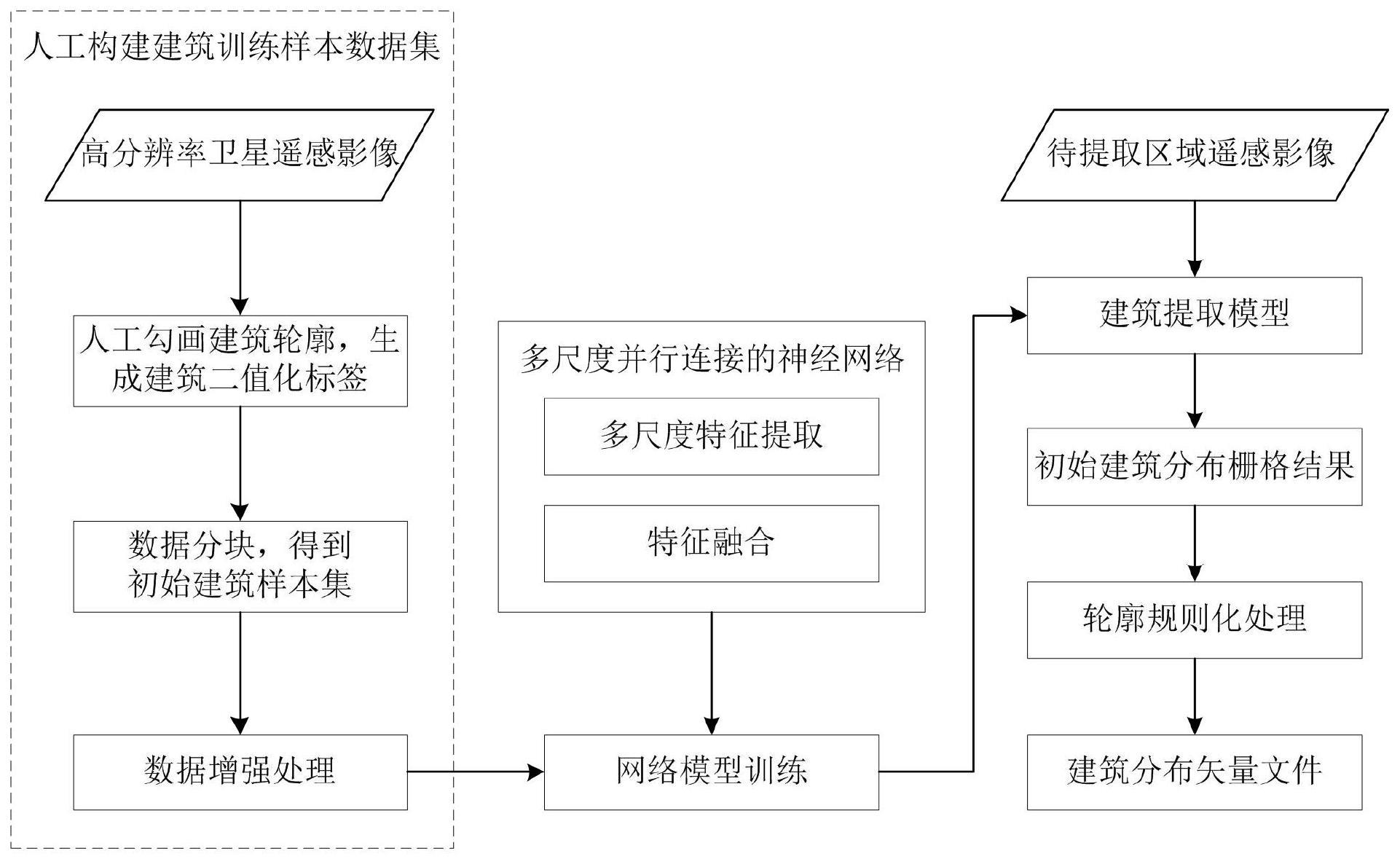
3、一种基于深度学习和轮廓规则化的遥感影像建筑提取方法,包括以下步骤:
4、步骤1:人工构建建筑训练样本数据集;
5、步骤2:构建并训练建筑提取模型,包括以下步骤:
6、步骤21:构建多尺度并行连接的神经网络,所述多尺度并行连接的神经网络用于并行提取四个不同尺度的特征图并且进行特征交叉融合,得到网络初始融合特征;
7、步骤22:根据网络初始融合特征分别计算类别概率图和类别特征;
8、步骤23:利用注意力机制转换的方式计算区域上下文特征;
9、步骤24:将网络初始融合特征与区域上下文特征进行融合,得到分割特征;
10、步骤25:所述建筑训练样本数据集中的样本影像经过两个3×3的卷积以及两个bn层以及relu激活函数,初始特征输出为原影像尺寸大小的特征图,将得到的初始特征图输入所述多尺度并行连接的神经网络,使用交叉熵损失函数作为损失函数,并采用随机梯度下降算法进行优化训练,训练后得到建筑提取模型;
11、步骤3:将待提取区域遥感影像输入建筑提取模型,得到对应的初始建筑分布栅格结果;
12、步骤4:对所述初始建筑分布栅格结果进行形态学上的轮廓规则化处理,具体的轮廓规则化处理过程如下:
13、步骤41:对所述初始建筑分布栅格结果进行开运算;
14、步骤42:基于开运算后得到的各单体建筑形态,提取初始建筑轮廓信息,并以点集的形式进行记录;
15、步骤43:采用道格拉斯-普克算法对点集进行优化,得到初步简化后的各个建筑的轮廓l;
16、步骤44:确定轮廓l对应的最小外接矩形r,并计算轮廓l的面积与最小外接矩形r的面积的比值,若比值大于阈值,则以最小外接矩形r的轮廓作为最终建筑轮廓,然后执行步骤46;若比值小于等于阈值,则执行步骤45;
17、步骤45:对轮廓l进行凹陷填充以及直角边优化;
18、步骤46:生成包括建筑轮廓矢量图斑的建筑分布矢量文件。
19、本发明的有益效果是:
20、本发明提出了一种基于深度学习和轮廓规则化的遥感影像建筑提取方法,实现在不同影像尺度下,仍能获取轮廓规整、应用性强的建筑分布矢量。采用多尺度并行连接的神经网络结构,以保证不同分辨率下建筑特征的有效利用。在过程中联系上下文信息,以提升建筑提取的准确率。使用多尺度训练和多尺度预测的方式,提高模型在多分辨率影像下的泛化性。采用轮廓规则化方法对建筑分割结果进行优化,以使得轮廓更贴近建筑实际边缘。
技术特征:
1.一种基于深度学习和轮廓规则化的遥感影像建筑提取方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于深度学习和轮廓规则化的遥感影像建筑提取方法,其特征在于,所述多尺度并行连接的神经网络包括由四个尺度的并行特征提取网络组成的并行卷积流,在样本影像输入所述多尺度并行连接的神经网络后,首先经过两个3×3的卷积以及两个bn层以及relu激活函数,初始特征输出为原影像尺寸大小的特征图162×162×64,接下来经过四个卷积流分支,具体过程如下:
3.根据权利要求1所述的一种基于深度学习和轮廓规则化的遥感影像建筑提取方法,其特征在于,步骤1包括以下步骤:
4.根据权利要求3所述的一种基于深度学习和轮廓规则化的遥感影像建筑提取方法,其特征在于,在人工构建建筑训练样本数据集时,遵循以下原则:
5.根据权利要求3或4所述的一种基于深度学习和轮廓规则化的遥感影像建筑提取方法,其特征在于,数据增强处理的操作包括水平翻转、竖直翻转、随机旋转和仿射变换的任意随机组合。
6.根据权利要求1所述的一种基于深度学习和轮廓规则化的遥感影像建筑提取方法,其特征在于,对轮廓l进行凹陷填充时,计算轮廓l中所有两条边的夹角,若形成的三角形为内凹三角形,则计算三角形面积,若三角形面积小于整个轮廓面积的5%,则对三角形进行填充。
7.根据权利要求1所述的一种基于深度学习和轮廓规则化的遥感影像建筑提取方法,其特征在于,对轮廓l进行直角边优化时,包括两种情况:
8.根据权利要求1所述的一种基于深度学习和轮廓规则化的遥感影像建筑提取方法,其特征在于,所述阈值为0.8。
技术总结
本发明涉及一种基于深度学习和轮廓规则化的遥感影像建筑提取方法,属于光学遥感技术应用领域,包括步骤:人工构建建筑训练样本数据集;构建并训练建筑提取模型;将待提取区域遥感影像输入建筑提取模型,得到对应的初始建筑分布栅格结果;对所述初始建筑分布栅格结果进行形态学上的轮廓规则化处理,得到包括建筑轮廓矢量图斑的建筑分布矢量文件。本发明所提出的一种基于深度学习和轮廓规则化的遥感影像建筑提取方法,能够实现在不同影像尺度下,仍能获取轮廓规整、应用性强的建筑分布矢量,模型泛化性更强,提取的建筑轮廓更贴近建筑实际边缘,提取精度更高。
技术研发人员:刘思言,王春月,秦磊,赵宇恒,付璐,于海洋
受保护的技术使用者:长光卫星技术股份有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!