一种基于多分类器决策级融合的目标鉴别方法与流程
本发明涉及一种基于多分类器决策级融合的目标鉴别方法,属于机器学习及信息融合领域。
背景技术:
1、多源数据融合方法按照融合层级的不同被分为像素级,特征级与决策级。像素级融合方法直接对原始数据进行处理,识别结果也是基于融合后的数据获得,这类方法的优点在于信息损失少,但是由于原始数据数据量通常较大,因此该类方法无法满足实时性,且对不同传感器之间的标定精度要求较高。特征级融合方法对多源数据的特征进行融合,需要首先提取各类原始数据的特征,提取后的特征相较于原始数据更加简单,因此该类方法在实时性上较像素级融合方法更有优势,但是信息损失也更加显著,同时由于融合效果受特征提取方法影响,因此对特征学习更充分的深度学习方法在该层次更有优势。上述两类方法都是在较低层对数据进行融合,对传感器配准及多源数据的时间一致性与空间一致性有严格要求。同时不同传感器覆盖范围的差异,也会对融合结果造成影响。
2、决策级融合方法是更高层次的数据融合,融合对象是不同类型数据的识别结果。该类方法实时性好,受传感器配准误差影响小,对传感器要求不高,同时不同传感器的处理结果可互为对照。决策级融合方法要求不同类型数据针对同一对象独立获得识别结果,因此该类算法允许两类数据中的一个检测结果出错且最终结果不一致,这代表着某一类数据质量较差时整个系统也能得到正确的结果,因此具有较好的容错能力。
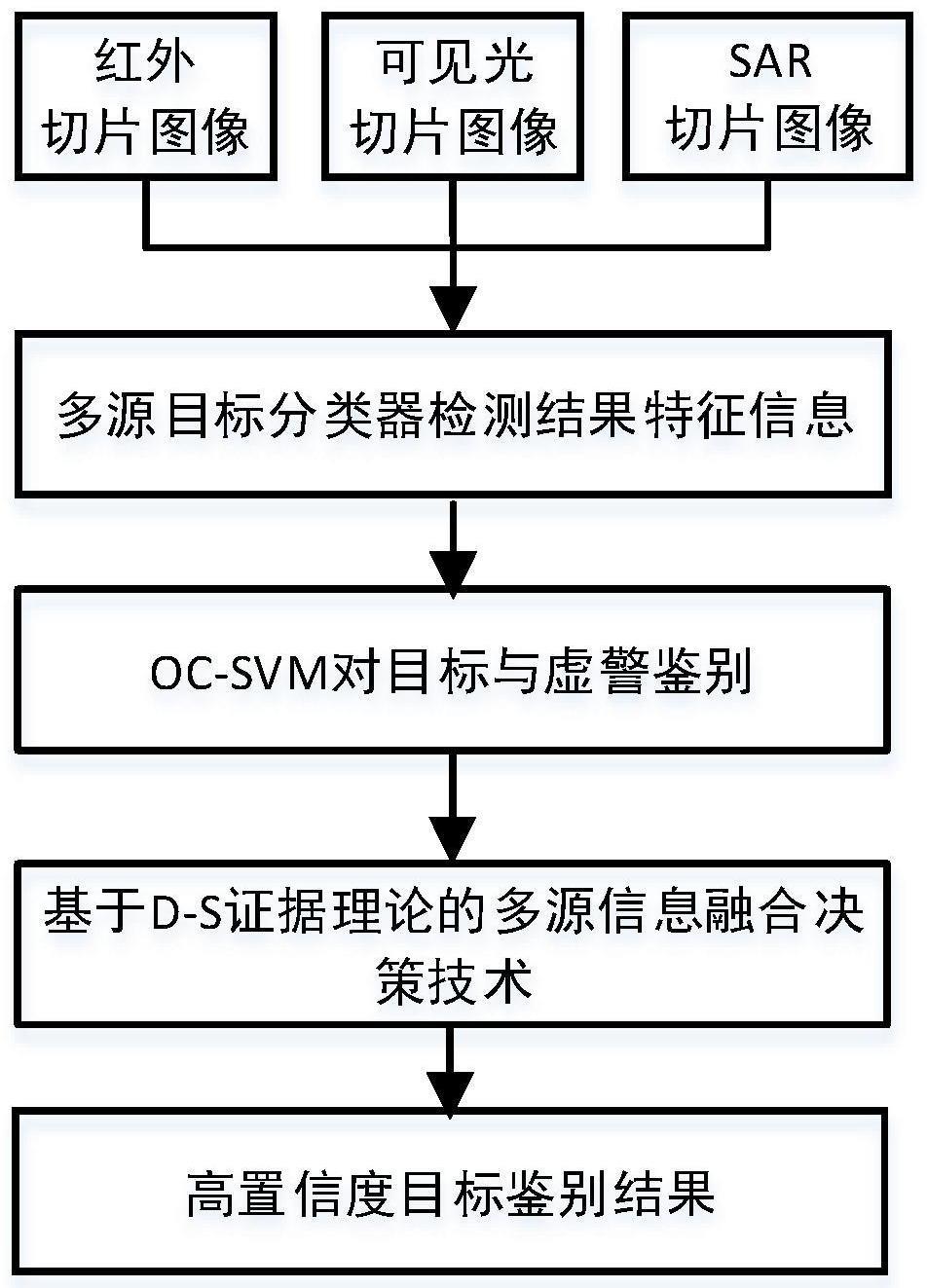
3、在综合利用多源遥感信息进行目标检测中,传统虚警剔除技术难以适应实际目标样本与虚警样本极不平衡、虚警样本类内特征差异大;结合目标在可见光、红外、sar三类载荷下的特征属性表达对目标鉴别的贡献具有差异互补的特点,提出基于多分类器决策级融合的时敏目标鉴别技术。以各信号源特征为参量构建概率函数,并结合模糊矩阵理论拟合不同数据源之间的信息差异,利用d-s证据理论进行决策级融合,运算复杂度较低,且具有较高的容错性和鲁棒性;模糊理论的应用解决多源数据在特征表达上的差异。
技术实现思路
1、有鉴于此,本发明提供了一种基于多分类器决策级融合的目标鉴别方法,针对目标在多重数据源下的特征属性表达对目标鉴别的贡献具有差异互补的特点,结合模糊矩阵理论拟合不同数据源之间的信息差异,实现决策融合,从而提升时敏目标辨识精度。
2、一种基于多分类器决策级融合的目标鉴别方法,包括以下步骤:
3、步骤一、采用多种观测设备对目标进行观测,获取各观测设备下的目标特征,共同构成目标特征空间;
4、步骤二、对所述目标特征空间使用单类svm方法进行回归,得到目标特征的决策值;
5、步骤三、根据各目标特征的决策值,基于模糊相似矩阵与d-s证据理论联合决策,得到联合决策值,实现对目标的最终确认。
6、进一步地,所述步骤一中获取各观测设备下的目标特征的具体过程为:
7、利用已有训练样本对深度卷积神经网络进行无监督训练,然后将多种观测设备对目标进行观测所采集的数据集输入卷积神经网络,获得各观测设备下目标。
8、进一步地,所述步骤三,包括如下步骤:
9、1)根据各目标特征的决策值,确定目标特征空间的模糊相似矩阵;
10、2)根据模糊相似矩阵,确定支持度与可信度,基于d-s证据理论获取联合决策值。
11、进一步地,所述确定目标特征空间的模糊相似矩阵,包括如下内容:
12、目标特征空间有共m个信息来源,观测目标为n个,每个信息来源对应的目标特征的决策值可看作一组证据e1,e2,…,em,记为u=(u1,u2,…,um),其中每个量ui(i=1,2,…m)对应的n个特性指标记为向量u=(ui1,ui2,…uin),由此可构造特性函数rij:
13、
14、其中,∧表示逻辑与运算、∨表示逻辑或运算;
15、利用下式将矩阵rij中相对应的数值代入,可以求出模糊相似矩阵r:
16、
17、进一步地,所述确定支持度与可信度,包括如下内容:
18、观测目标为n个记为u=(o1,o2,…on),相应的基本分配函数为l1,l2,…,ln,基本分配函数取值与目标特征的决策值相同,信息来源m与观测目标n数目相同,把模糊相似矩阵r的每行相加,令:
19、
20、其中,sup(li)表示证据ei的支持度,将证据的支持度归一化得到证据的可信度crd(li),ei可信度为:
21、
22、进一步地,所述基于d-s证据理论获取联合决策值,实现对目标的最终确认,包括如下内容:
23、根据可信度crd(li)可得证据ei的加权平均后证据的基本分配函数值为:
24、
25、其中,li(oj)表示第i个信息来源中的第j个观测目标的基本分配函数值;
26、利用上式计算可得到各个证据加权平均后的证据的基本分配函数值,再利用d-s基本合成规则进行证据融合,令
27、
28、
29、其中,为设定值,l(o)为最终的联合决策值,若最终联合决策值大于设定值,则判断目标为有效目标,反之则为虚警。
30、有益效果:
31、第一、本方法步骤二中,采用了单类svm方法,是因为多源数据中的典型的时敏目标通常真实样本量少,而虚警类型多样,特征差异大,且虚警样本巨大,与目标样本不平衡,若直接采用svm对目标与虚警进行两类间的训练,往往达不到预期效果,本项目中采用单类svm(oc-svm)在目标特征空间内对目标进行回归,将分类问题转化为目标特征回归问题,从而解决样本不平衡问题。
32、第二、本方法步骤一中对深度卷积神经网络进行训练,因为在多源数据中的遥感数据存在大量的无标注样本,利用这些样本来对深度卷积神经网络进行无监督的训练能更好的的提高其对目标和非目标的可鉴别性,因此利用一定数量训练样本加入到训练模型,进行半监督训练,能使得深度卷积网络所提取的特征更方便于分类,提高特征的对于目标和非目标的可鉴别性。
33、第三、本方法步骤三中利用d-s证据理论进行决策级融合,运算复杂度较现有的其他方法而言更低,且具有较高的容错性和鲁棒性。
34、第四、在步骤三中,利用d-s证据理论进行决策级融合,最终获取多观测手段的决策值的高置信度融合鉴别,根据各观测手段的特征差异互补的特点,进行融合鉴别后能够降低虚警率,提高识别率。
技术特征:
1.一种基于多分类器决策级融合的目标鉴别方法,其特征在于,包括以下步骤:
2.如权利要求1所述的方法,其特征在于,所述步骤一中获取各观测设备下的目标特征的具体过程为:
3.如权利要求1或2所述的方法,其特征在于,所述步骤三,包括如下步骤:
4.如权利要求3所述的方法,其特征在于,所述确定目标特征空间的模糊相似矩阵,包括如下内容:
5.如权利要求4所述的方法,其特征在于,所述确定支持度与可信度,包括如下内容:
6.如权利要求4所述的方法,其特征在于,所述基于d-s证据理论获取联合决策值,实现对目标的最终确认,包括如下内容:
技术总结
本发明公开了一种多分类器决策级融合的目标鉴别方法,针对目标在多重数据源下的特征属性表达对目标鉴别的贡献具有差异互补的特点,利用已有训练样本对深度卷积神经网络进行无监督训练,然后将各载荷的数据集输入卷积神经网络,获得各载荷的目标特征,共同构成一个目标特征空间;然后采用单类SVM(OC‑SVM)在目标特征空间内对目标进行回归完成目标与虚警鉴别;最后结合模糊矩阵理论拟合不同数据源之间的信息差异,结合支持度和可信度实现D‑S证据理论数据决策融合,实现对目标的最终确认。为多载荷目标探测系统的搭建提供载荷组合及参数选择的理论支撑及关键技术支撑。
技术研发人员:王长杰,梁若飞,高净植,赵爱玲
受保护的技术使用者:北京理工雷科空天信息技术有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!