一种视觉定位方法、终端及存储介质与流程
本申请涉及机器视觉领域,尤其涉及一种视觉定位方法、终端及存储介质。
背景技术:
1、近年来,机器视觉技术飞速发展,机器人与机器视觉技术的结合在工业方面已经有了较为成熟的应用。机器视觉技术赋予了机器人感知工作环境变化的能力。通过视觉系统,机器人能够精准地对工作空间内的目标进行识别与定位,并自主运动到目标位置。传统的视觉定位技术中使用的相机标定结果进行视觉定位,存在视觉定位的精度不高和鲁棒性较差的问题。
技术实现思路
1、本申请实施例的主要目的在于提供一种视觉定位方法、终端及存储介质,旨在提高视觉定位的精度和鲁棒性。
2、第一方面,本申请实施例提供一种视觉定位方法,包括:
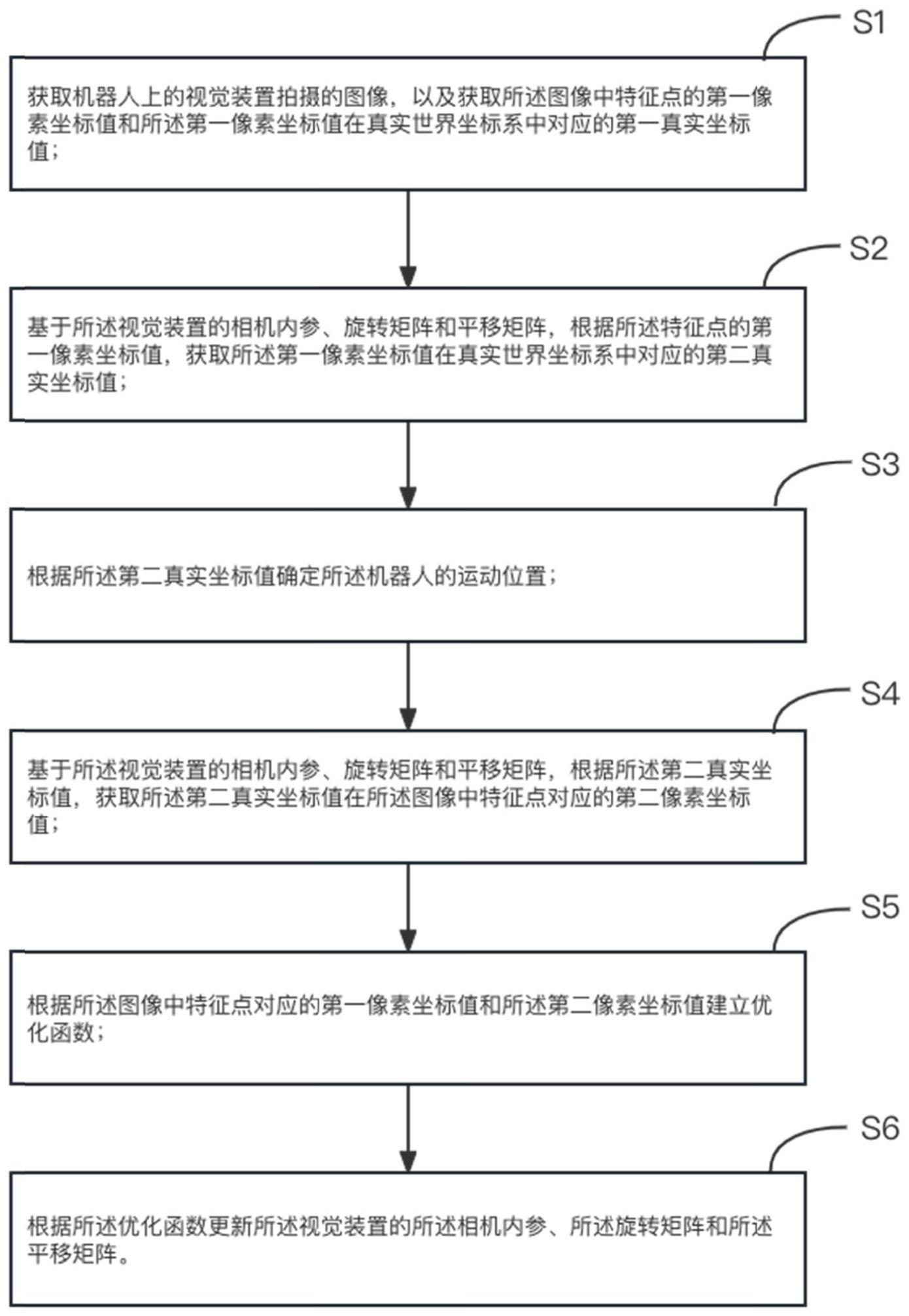
3、获取机器人上的视觉装置拍摄的图像,以及获取图像中特征点的第一像素坐标值和第一像素坐标值在真实世界坐标系中对应的第一真实坐标值;
4、基于视觉装置的相机内参、旋转矩阵和平移矩阵,根据特征点的第一像素坐标值,获取第一像素坐标值在真实世界坐标系中对应的第二真实坐标值;
5、根据第二真实坐标值确定机器人的运动位置;
6、基于视觉装置的相机内参、旋转矩阵和平移矩阵,根据第二真实坐标值,获取第二真实坐标值在图像中特征点对应的第二像素坐标值;
7、根据图像中特征点对应的第一像素坐标值和第二像素坐标值建立优化函数;
8、根据优化函数更新视觉装置的相机内参、旋转矩阵和平移矩阵。
9、第二方面,本申请实施例还提供一种机器人终端,终端包括处理器、存储器、存储在存储器上并可被处理器执行的计算机程序以及用于实现处理器和存储器之间的连接通信的数据总线,其中计算机程序被处理器执行时,实现如本申请说明书提供的任一项视觉定位方法的步骤。
10、第三方面,本申请实施例还提供一种存储介质,用于计算机可读存储,其特征在于,存储介质存储有一个或者多个程序,一个或者多个程序可被一个或者多个处理器执行,以实现如本申请说明书提供的任一项的视觉定位方法的步骤。
11、本申请实施例提供一种视觉定位的方法、终端及存储介质,其中,该视觉定位方法通过获取机器人上的视觉装置拍摄的图像,以及获取图像中特征点的第一像素坐标值和第一像素坐标值在真实世界坐标系中对应的第一真实坐标值;基于视觉装置的相机内参、旋转矩阵和平移矩阵,根据特征点的第一像素坐标值,获取第一像素坐标值在真实世界坐标系中对应的第二真实坐标值;根据第二真实坐标值确定机器人的运动位置;基于视觉装置的相机内参、旋转矩阵和平移矩阵,根据第二真实坐标值,获取第二真实坐标值在图像中特征点对应的第二像素坐标值;根据图像中特征点对应的第一像素坐标值和第二像素坐标值建立优化函数;根据优化函数更新视觉装置的相机内参、旋转矩阵和平移矩阵。本申请通过获取图像中特征点的像素坐标值和像素坐标值在真实世界坐标系中对应的真实坐标值,然后基于视觉装置的相机内参、旋转矩阵和平移矩阵,获取像素坐标值在真实世界坐标系中对应的预测坐标值,根据预测坐标值再推导出预测像素坐标值,利用预测像素坐标值和像素坐标值构建优化函数,通过优化函数的求解更新视觉装置的相机内参、旋转矩阵和平移矩阵,从而可以利用实际应用场景中的数据实现对视觉装置的相机内参、旋转矩阵和平移矩阵的更新,更加贴合实际应用场景中的参数需求,进而提高了视觉定位的精度。
技术特征:
1.一种视觉定位方法,其特征在于,所述方法包括:
2.根据所述权利要求1所述的方法,其特征在于,所述获取所述机器人上的视觉装置拍摄的图像,包括:
3.根据所述权利要求1所述的方法,其特征在于,所述方法还包括:
4.根据所述权利要求3所述的方法,其特征在于,获取标定后的所述视觉装置的相机内参,包括:
5.根据所述权利要求4所述的方法,其特征在于,所述根据相机标定原理构建矩阵方程,以获取所述视觉装置的相机内参以及畸变参数,包括:
6.根据所述权利要求1所述的方法,其特征在于,所述根据所述图像中特征点对应的第一像素坐标值和所述第二像素坐标值建立优化函数,包括:
7.根据所述权利要求6所述的方法,其特征在于,根据所述误差构建所述优化函数,包括:
8.根据所述权利要求1所述的方法,其特征在于,所述根据所述优化函数更新所述视觉装置的所述相机内参、所述旋转矩阵和所述平移矩阵,包括:
9.一种机器人,其特征在于,所述终端包括处理器、存储器;
10.一种计算机存储介质,用于计算机存储,其特征在于,所述计算机存储介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,以实现权利要求1至8中任一项所述的视觉定位方法的步骤。
技术总结
本申请实施例涉及机器视觉领域,具体提供了一种视觉定位方法、终端以及存储介质。该方法包括:获取机器人上的视觉装置拍摄的图像,并获取图像中特征点的第一像素坐标值及其在真实世界坐标系中对应的第一真实坐标值;基于视觉装置的相机内参、旋转矩阵和平移矩阵,根据特征点的第一像素坐标值,获取第一像素坐标值在真实世界坐标系中对应的第二真实坐标值;根据第二真实坐标值确定机器人的运动位置;基于视觉装置的相机内参、旋转矩阵和平移矩阵,根据第二真实坐标值,获取第二真实坐标值在图像中特征点对应的第二像素坐标值;根据图像中特征点对应的第一像素坐标值和第二像素坐标值建立优化函数并更新相机内参、旋转矩阵和平移矩阵。
技术研发人员:黎江华,张鹏飞,杨铤,卢靖东
受保护的技术使用者:深圳优艾智合机器人科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!