一种基于曲率特征点检测的CPD配准方法与流程
一种基于曲率特征点检测的cpd配准方法
技术领域
1.本发明涉及图像配准领域,尤其涉及一种基于曲率特征点检测的cpd配准方法。
背景技术:
2.在图像检索、模式识别、医学影像处理等领域,点集配准是主要的图像配准方法之一。目前应用最广且最为成熟的配准算法是迭代最近点(iterative closest point,icp)算法,其通过迭代最小化均方距离直到目标函数收敛的思想进行配准,对尺寸形状相似的刚性物体配准有较好的配准结果。但此算法对初始点选择较为敏感,且对噪声点和异常点鲁棒性较差,适用范围比较受限。为了解决这些问题,提出了基于特征点检测的相干点漂移点集匹配算法(cpd)。
技术实现要素:
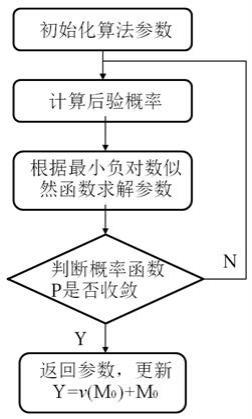
3.本发明的目的在于提供一种基于曲率特征点检测的cpd配准方法,以解决上述技术问题,为实现上述目的本发明采用以下技术方案:一种基于曲率特征点检测的cpd配准方法,包括如下步骤:步骤1:根据曲率值筛选目标点集的特征点集作为混合高斯模型的内核点集;步骤2:初始化cpd算法中的混合高斯模型的参数;步骤3:计算后验概率p(t|x)与p(t);步骤4:根据最小负对数似然函数求解参数;步骤5:判断概率函数p是否收敛,重复步骤3至步骤5直至收敛;步骤6:将求得的变换矩阵应用于点集数据中,完成配准,返回模型参数,并更新点集。
4.与现有技术相比,本发明具有以下优点:本发明公开了一种基于曲率特征点检测的配准方法,通过特征点集提取与非刚性配准算法相结合,将需要配准的目标点集通过曲率最大点筛选的方法提取出来,对特征点集采用相干点漂移算法进行点集配准,可以减少运算规模,降低计算机负荷,减少算法运行时间,提高配准效率。
附图说明
5.图1为本发明方法流程图;图2为配准前两组点集示意图;图3为传统cpd配准结果图;图4为模板特征点集检测结果图;图5为目标点集特征点集检测结果图;图6为基于特征点检测cpd配准结果图。
具体实施方式
6.下面结合附图和具体实施对本发明作进一步详细阐述。
7.cpd配准算法是一种基于速度场运动一致性约束的最大似然估计得到的最优匹配算法。在用cpd算法进行点集配准时,一组点集作为混合高斯模型的内核,另一组点集作为混合高斯模型的数据集,通过利用确定性退火em算法对最大似然估计进行优化,最终找到两个点集的对应关系与变换关系,实现两组点集的非刚性配准。特征点检测是通过检测点集中具有代表性的点集来描述整组点集的特征,特征点作为点集中有代表性且稳定性的点,能够在保留点集特征的同时简化计算,减少运算时间。
8.模板点集通过某种变换关系使其和目标点集逐渐收敛,即为完成了点集配准。假设模板点集坐标为mi=(m1,...,mn)
t
,这组点集作为混合高斯模型的内核点集,目标点集为ti=(t1,...,tm)
t
,作为混合高斯模型的数据集,n,m代表两组点的数目。高斯混合模型的概率密度函数为公式(1):(1);(2);其中p(t|x)是高斯混合模型概率密度函数基函数,ω表示溢出点的权重值,取值范围0~1,t为平移变量,变换参数σ由最小负对数似然函数公式(3)计算获得:(3);根据似然函数梯度下降法的基本原理,对(3)进行求导,得到(4)、(5)两式,按照负对数似然函数计算方法,当收敛时迭代停止,从而,得到各个变换参数的解。
9.(4);
ꢀꢀꢀ
(5);我们采用局部曲率最大点来描述点集形状特征,将其作为标记特征点,pi,pj分别为目标点集中的任意两点,p
l
为曲率最大点集,即为特征点集;
ꢀꢀꢀꢀꢀ
(6);根据以上公式推导过程,本方提出的基于特征点检测的cpd配准算法流程如下。
10.一种基于曲率特征点检测的cpd配准方法,包括如下步骤:步骤1:根据曲率值筛选目标点集的特征点集作为混合高斯模型的内核点集;步骤2:初始化cpd算法中的混合高斯模型的参数;步骤3:计算后验概率p(t|x)与p(t);步骤4:根据最小负对数似然函数求解参数;步骤5:判断概率函数p是否收敛,重复步骤3至步骤5直至收敛;步骤6:将求得的变换矩阵应用于点集数据中,完成配准,返回模型参数,并更新点集。
11.通过两组实验对比,计算了传统cpd和基于特征点的cpd配准的计算时间和配准误差。
12.表1 两种方法性能对比结果 计算时间/s配准误差/mm传统cpd0.93170.3365特征点cpd0.34940.5490如表1所示,通过下表可以看出,基于特征点检测的cpd算法计算时间缩短为原来的1/3,配准误差有些许提高,但是总体不影响配准效果。因此,这种基于特征点检测的cpd配准算法可以应用在对于配准实时性要求较高的配准实验中。
13.以上所述为本发明较佳实施例,对于本领域的普通技术人员而言,根据本发明的教导,在不脱离本发明的原理与精神的情况下,对实施方式所进行的改变、修改、替换和变型仍落入本发明的保护范围之内。
技术特征:
1.一种基于曲率特征点检测的cpd配准方法,其特征在于,包括如下步骤:步骤1:根据曲率值筛选目标点集的特征点集作为混合高斯模型的内核点集;步骤2:初始化cpd算法中的混合高斯模型的参数;步骤3:计算后验概率p(t|x)与p(t);步骤4:根据最小负对数似然函数求解参数;步骤5:判断概率函数p是否收敛,重复步骤3至步骤5直至收敛;步骤6:将求得的变换矩阵应用于点集数据中,完成配准,返回模型参数,并更新点集。
技术总结
本发明涉及一种基于曲率特征点检测的CPD配准方法,包括如下步骤:根据曲率值筛选目标点集的特征点集作为混合高斯模型的内核点集;初始化CPD算法中的混合高斯模型的参数;计算后验概率P(t|x)与P(t);根据最小负对数似然函数求解参数;判断概率函数P是否收敛,重复步骤3至步骤5直至收敛;将求得的变换矩阵应用于点集数据中,完成配准,返回模型参数,并更新点集。本发明通过特征点集提取与非刚性配准算法相结合,将需要配准的目标点集通过曲率最大点筛选的方法提取出来,对特征点集采用相干点漂移算法进行点集配准,可以减少运算规模,降低计算机负荷,减少算法运行时间,提高配准效率。提高配准效率。提高配准效率。
技术研发人员:刘咏璐 韩光照 胡立刚 孙家正 白亚平 王晨 韩广生
受保护的技术使用者:哈尔滨电气集团海洋智能装备有限公司
技术研发日:2022.12.29
技术公布日:2023/3/10
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1