一种基于ART神经网络的同路线识别方法与流程
本发明属于智能网联领域,具体涉及一种基于art神经网络的同路线识别方法。
背景技术:
1、随着智能网联技术的发展,商用车大数据研究会涉及到同路线下对比车辆经济性、动力性及驾驶性能等课题,目前同路线识别技术没有记忆库,需要线下处理,匹配效率低,不能满足大数据分析任务的广、急、快、准。
2、本发明提出的同路线识别是一种应用神经网络方法的同路线识别方法,利用该方法,系统可以实现查询的高效性,作为一种全新的技术路线,该方法及系统能否精准快速的识别同路线,直接关系到车辆动力匹配、燃油经济性、驾驶性能等研究的时间成本和效果。
技术实现思路
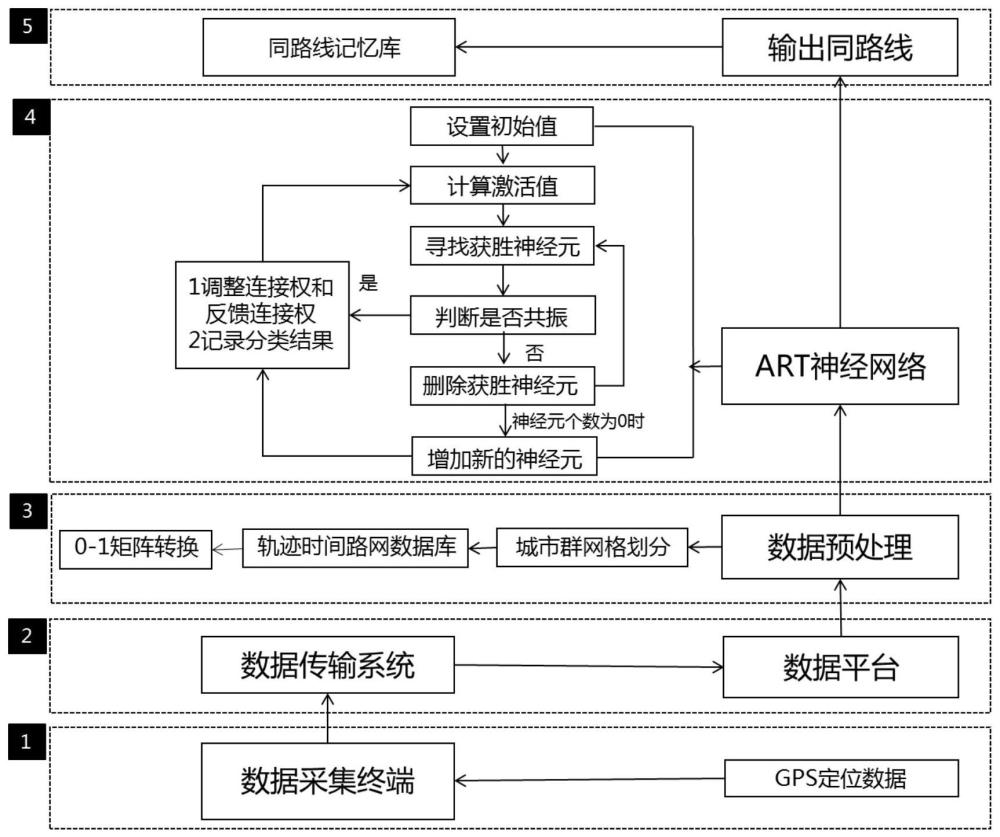
1、本发明提出了一种基于art神经网络的同路线识别方法,该发明使用传感器采集gps数据,经过数据传输系统传输给数据平台,对城市群进行网格划分后,建立城市群的轨迹时间路网数据库,对数据进行0-1矩阵处理后,对其进行art神经网络聚类,最终得到多条相同路线,随着样本的增加,所涉及的记忆容量可以自动增加,并且在不破坏原记忆样本的情况下对新加入的样本进行识别。
2、为了解决现有技术存在的上述问题,本发明所采用的技术方案为:
3、一种基于art神经网络的同路线识别方法,包括以下步骤:
4、步骤1:获取车辆定位数据,所述定位数据包括车辆行驶轨迹。
5、步骤2:构建城市群,对城市群进行网格划分。
6、步骤3:搭建轨迹时间路网数据库。
7、步骤4:路线0-1矩阵处理。
8、步骤5:建立自适应共振理论(art)神经网络模型,对步骤4中的0-1矩阵进行聚类,将结果存入记忆库中。
9、步骤6:新增车辆定位数据。
10、进一步的,所述步骤1中,使用传感器采集gps定位数据,并通过数据传输系统将定位数据传输给数据平台。
11、进一步的,所述步骤2中,通过经纬度对城市群进行网格划分,将城市群划分为n×m个格子,其中n和m均为自然数。
12、进一步的,所述步骤2中,在划分好的城市群中添加增加规划好的路径的起点和终点(g地到b地),以这些地点所在经纬度的最边界为矩形对覆盖面以度数(或里程)进行划分,将覆盖面划分为n×m的格子。
13、进一步的,所述步骤3中,将步骤1中采集的车辆定位数据映射在步骤2所构建的城市群中,提取车辆在步骤2中城市群之间的时间点,将时间点存入路网数据库;搭建轨迹时间路网数据库:根据gps数据,提取车辆在步骤4所述的城市群之间的时间点,如,根据车辆运行轨迹识别驶出a城市,驶入b城市的时间点,同理可识别b市到d市,c市到f市的时间点,将时间点存入路网数据库。
14、进一步的,根据步骤3中存入的时间点,从数据平台获取与时间点对应的车辆定位数据,在步骤2中的城市群网格中,将对应的车辆定位数据运行轨迹转为0-1矩阵。
15、进一步的,根据步骤3所述的时间点,从数据平台获取gps数据(运行轨迹),在步骤4所述的城市群网格中,将对应的车辆行驶轨迹转为0-1矩阵(转化的方法:如果每个网格里出现gps点次数超过1次,那么该网格的值记为1,否则记为0,因此得到0-1矩阵)。
16、进一步的,所述步骤5中,通过城市群的0-1矩阵进行聚类,将车辆行驶轨迹划分为n类(相同轨迹的为一类),并做相应标记,将同类车辆行驶轨迹存入同路线记忆库。
17、对步骤4所述某城市群(如a市到b市)的0-1矩阵进行聚类,可将其运动轨迹划分为n类(相同轨迹的为一类)并做相应标记,存入同路线记忆库。
18、进一步的,所述步骤6中,经过步骤3、步骤4后,根据自适应共振理论(art)神经网络模型的特性(记忆容量可以随样本的增加而自动增加,可以在不破坏原记忆样本的情况下学习新的样本)可直接进行步骤5,结合同路线记忆库,识别属于旧的类别还是新的类,并做相应标记。
19、本发明具有以下有益效果为:
20、(1)本发明通过构建城市群,并搭建轨迹时间路网数据库,可以更快的获取城市之间的同路线,提升了寻路时的效率。
21、(2)对城市群之间的路线进行art神经网络聚类,搭建同路线记忆库,可以精准的识别多条同路线。
22、(3)新增车辆运行轨迹可以在同路线记忆库的基础上进行识别,避免了全样本聚类时对内存的消耗。
技术特征:
1.一种基于art神经网络的同路线识别方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于art神经网络的同路线识别方法,其特征在于:所述步骤1中,使用传感器采集gps定位数据,并通过数据传输系统将定位数据传输给数据平台。
3.根据权利要求1所述的基于art神经网络的同路线识别方法,其特征在于:所述步骤2中,通过经纬度对城市群进行网格划分,将城市群划分为n×m个格子,其中n和m均为自然数。
4.根据权利要求1所述的基于art神经网络的同路线识别方法,其特征在于:所述步骤3中,将步骤1中采集的车辆定位数据映射在步骤2所构建的城市群中,提取车辆在步骤2中城市群之间的时间点,将时间点存入路网数据库。
5.根据权利要求1所述的基于art神经网络的同路线识别方法,其特征在于:所述步骤4中,根据步骤3中存入的时间点,从数据平台获取与时间点对应的车辆定位数据,在步骤2中的城市群网格中,将对应的车辆定位数据运行轨迹转为0-1矩阵。
6.路线0-1矩阵处理:根据步骤5所述的时间点,从数据平台获取gps数据,在步骤4所述的城市群网格中,将对应的车辆行驶轨迹转为0-1矩阵。
7.根据权利要求1所述的基于art神经网络的同路线识别方法,其特征在于:所述步骤5中,通过城市群的0-1矩阵进行聚类,将车辆行驶轨迹划分为n类,并做相应标记,将同类车辆行驶轨迹存入同路线记忆库。
8.根据权利要求1所述的基于art神经网络的同路线识别方法,其特征在于:所述步骤6中,新增车辆定位数据经过步骤3、步骤4后,根据自适应共振理论神经网络模型的特性直接进行步骤5,结合同路线记忆库,识别属于旧的类别还是新的类,并做相应标记。
技术总结
本发明公开了一种基于ART神经网络的同路线识别方法,包括以下步骤:步骤1:获取车辆定位数据,所述定位数据包括车辆行驶轨迹;步骤2:构建城市群,对城市群进行网格划分;步骤3:搭建轨迹时间路网数据库;步骤4:路线0‑1矩阵处理;步骤5:建立自适应共振理论(ART)神经网络模型,对步骤4中的0‑1矩阵进行聚类;步骤6:新增车辆定位数据。本发明通过构建城市群,并搭建轨迹时间路网数据库,可以更快的获取城市之间的同路线,提升了寻路时的效率。
技术研发人员:薛方,张文博,周兵兵,王鹏,李海辉
受保护的技术使用者:陕西重型汽车有限公司
技术研发日:
技术公布日:2024/7/4
- 还没有人留言评论。精彩留言会获得点赞!