基于3D视觉的体积计算方法与流程
本发明涉及产品体积计算领域,特别涉及基于3d视觉的体积计算方法。
背景技术:
1、随着物流行业的无人化及数字化发展,越来越多物流企业提出智慧物流,智慧仓库平台。为更多的物流公司提供先进物流科技,利用智能分拣、重量和体积测量、reid跟踪等载体,帮助电商仓储物流企业打造数字化数字化闭环流程,助力企业提升核心竞争力和创造力,设计了一种非接触式3d视觉体积测量方案。
2、针对量方设备,主要有静态和动态两种。静态测量多采用面阵3d相机,可以在一帧曝光时间内完成一次视野空间内的全场拍摄测量。动态测量采用线激光扫描相机在给定时间里测量到一个截面的轮廓尺寸,同时通过物体确定的运动速度,得出运动方向的长度值,最后得到物体体积。
3、在特定的场合,如物流行业,均采用动态测量方案,而面阵3d相机静态测量有其局限性。而传统的线激光扫描采用一个相机,该相机置于待测物正上方。由于激光器和相机的视野夹角为固定,当有较大物体或较接近相机的物体经过时,线扫相机视野不能完整覆盖待测物导致测量失败。
技术实现思路
1、本发明解决的技术问题是提供一种计算简单并可扩大检测视野的基于3d视觉的体积计算方法。
2、本发明解决其技术问题所采用的技术方案是:一种基于3d视觉的体积计算方法,步骤为:
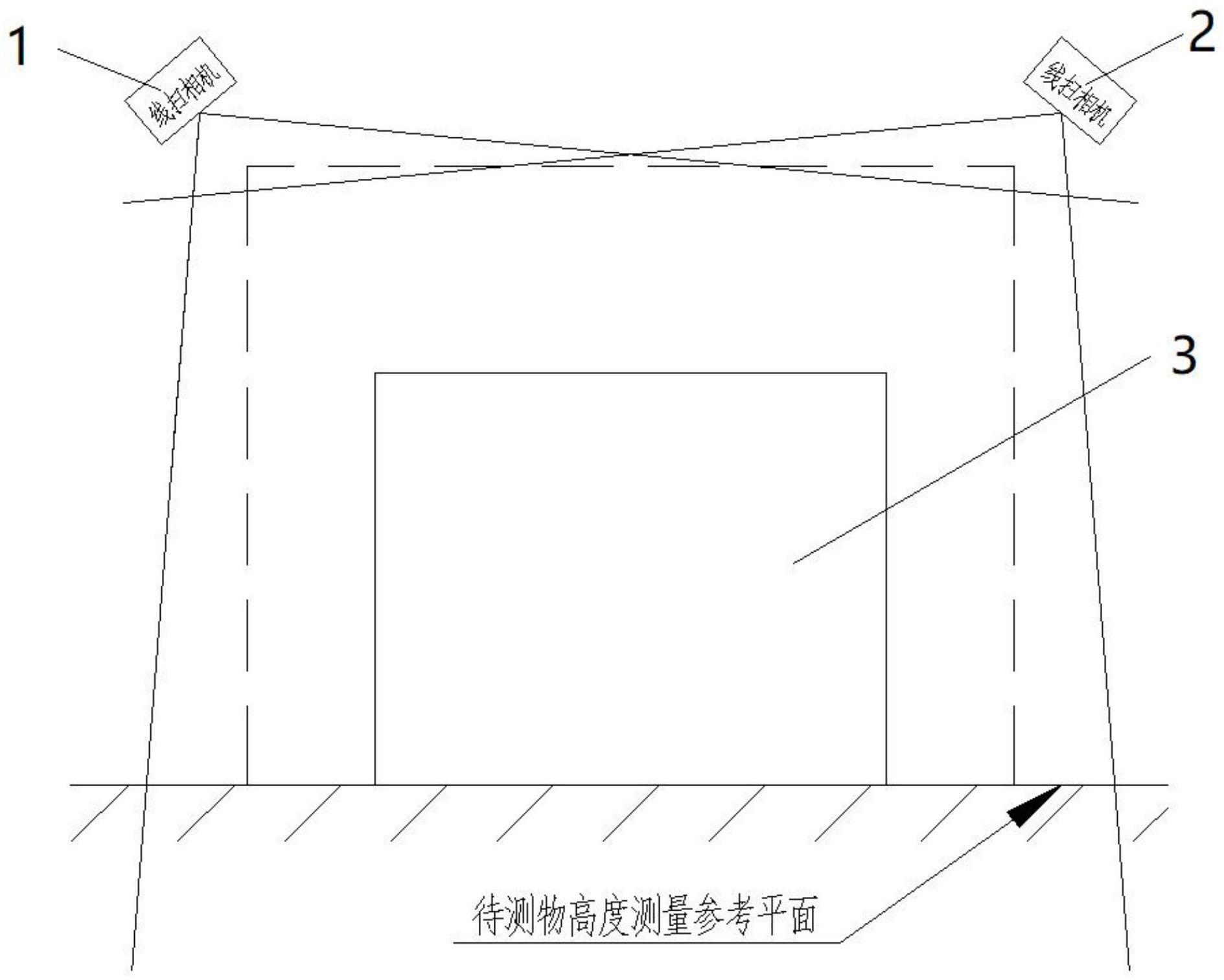
3、步骤一:包括第一线扫相机和第二线扫相机,所述第一线扫相机和第二线扫相机相对倾斜设置,使得待测产品位于第一线扫相机和第二线扫相机的总视野范围内;
4、步骤二:将第一线扫相机和第二线扫相机的两个线激光标定到同一个点云坐标系下,以方便点云拼接。标定的过程就是简单的在公共视野中放置一个小平面,两个激光器分别扫描该小平面得到点云,将两点云在同一个坐标系下转换重合即完成。
5、步骤三:拼接点云后,先进行点云离散点的统计滤波,以及基于先验信息的高度滤波,把噪点去掉;
6、步骤四:噪点去掉后,基于obb算法,对点云进行最小外接box的计算,得到包围盒box的三个轴朝向、半长和中心坐标;
7、步骤五:根据包围盒box的长宽高得到待测产品体积。
8、进一步的是:步骤二具体为,
9、设两个线激光的某个3d点分别为p1和p2,其刚体变换公式如下:
10、p2=srp1+t;
11、其中,s为缩放系数(本方案s为1),r为旋转矩阵,t为偏移;
12、两个线激光各自有n个点,即n组(p1,p2),按常规方法构建一个最小二乘,建立如下公式,
13、
14、求解其r和t,实现两个线激光点云的拼接。
15、进一步的是:步骤三具体为,
16、3.1、遍历点云,计算每个点与其最近的k个邻居点之间的平均距离μi;
17、
18、其中,di,j表示第i个点与第j个近邻点的距离;
19、3.2、计算所有平均距离的均值μ与标准差σ,并获取距离阈值dmax,具体计算为:
20、
21、
22、dmax=μ+α×σ 3-2-3;
23、其中,α是一个常数,可称为比例系数;
24、3.3、再次遍历点云,剔除每个点与k个邻居点的平均距离大于dmax的点,即
25、
26、其中,ki,j表示第i个点的第j个近邻点;
27、3.4、再进行遍历点云,采用基于先验信息的高度滤波进一步去除噪点。
28、进一步的是:步骤四具体为,
29、4.1、分解点云的xyz分量:把所有点的x、y、z值分别放到独立的数组中,并求出各自的均值,具体为:
30、
31、
32、
33、其中,ux,uy,uz分别表示所有点云x、y、z的均值;xi,yi,zi分别表示x、y、z值在各自的数组中第i个的值;
34、4.2、对x、y、z这三个随机变量求协方差矩阵c:
35、
36、其中,cov(x,y)代表x与y的协方差,以此类推,其他同理;
37、cov(x,y)=e[(xi-ux)(yi-uy)];
38、4.3、对4.2中的协方差矩阵求解特征值λ与特征向量m:
39、cm=λm;
40、4.4、将点集的几何中心平移至坐标系原点,并全部乘以m矩阵进行旋转变换得到p:
41、p=m(g+t);
42、其中,g表示点集的几何中心,t表示从几何中心平移至坐标系原点的平移矩阵;
43、4.5、根据旋转变换后的点的坐标,求xmax、xmin、ymax、ymin、zmax、zmin,进而求出obb中心坐标、obb三个方向的半长l/2、w/2和h/2。
44、进一步的是:步骤五具体为,
45、测产品体积v=l*w*h。
46、本发明的有益效果是:本发明采用相机作为线扫设备,而线激光产品中所设置的激光光源有较强的适应性,适用于较黑或者较亮的物体,无需额外配置光源,从而使得整个系统结构简单,且两个线扫相机可覆盖整个产品,同时通过点云系统、obb算法等形成的整个计算流程,可准确的计算出整个规则产品或不规则产品的体积,计算方式简单、准确。
技术特征:
1.一种基于3d视觉的体积计算方法,其特征在于:
2.如权利要求1所述的基于3d视觉的体积计算方法,其特征在于:步骤二具体为,
3.如权利要求2所述的基于3d视觉的体积计算方法,其特征在于:步骤三具体为,
4.如权利要求3所述的基于3d视觉的体积计算方法,其特征在于:步骤四具体为,
5.如权利要求4所述的基于3d视觉的体积计算方法,其特征在于:步骤五具体为,
技术总结
本发明公开了一种基于3D视觉的体积计算方法,步骤为:步骤一:所述第一线扫相机和第二线扫相机相对倾斜设置,使得待测产品位于相机的总视野范围内;步骤二:将两个线激光标定到同一个点云坐标系下,以方便点云拼接,步骤三:拼接点云后,先进行点云离散点的统计滤波,以及基于先验信息的高度滤波,把噪点去掉;步骤四:噪点去掉后,基于OBB算法,对点云进行最小外接Box的计算,得到包围盒Box的三个轴朝向、半长和中心坐标;步骤五:根据包围盒Box的长宽高得到待测产品体积,本发明采用相机作为线扫设备,而线激光产品中所设置的激光光源有较强的适应性,适用于较黑或者较亮的物体,无需额外配置光源,从而使得整个系统结构简单。
技术研发人员:包嘉东,张振伟,周坤
受保护的技术使用者:苏州深浅优视智能科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!