一种多旋翼空速解算方法、设备及计算机可读存储介质与流程
本发明涉及无人驾驶航空器,尤其涉及一种多旋翼空速解算方法、设备及计算机可读存储介质。
背景技术:
1、目前,区别于传统航空器,多旋翼航空器的速度控制方式多为地速控制而不是空速控制,因此,多旋翼航空器通常不安装空速传感器。但是,对于大型多旋翼的适航安全性需求,以及出于载荷强度的考虑,通常会要求空速测量和空速包线保护。
2、现有方案中,可根据上述要求考虑对大型多旋翼加装传统基于动压/静压原理的空速测量装置。但是,所加装的传统空速传感器在应用于大型多旋翼航空器时,存在明显的限制:一是,容易受多螺旋桨紊乱气流的干扰,或为免受气流干扰,需要从结构安装方面付出较大成本;二是,对于多旋翼航空器,空速测量并不直接介入控制规律,而加装的空速计会带来制造、调试和维护成本上的上升。
3、因此,如何在不增加硬件传感器的情况下,提出一种基于动力学原理的空速解算算法,成为目前亟待解决的技术问题。
技术实现思路
1、为了解决现有技术中的上述技术缺陷,本发明提出了一种多旋翼空速解算方法,该方法包括:
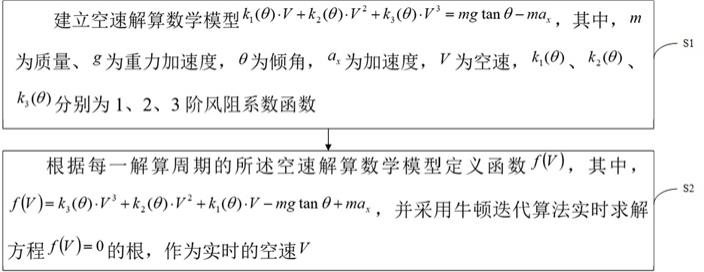
2、建立空速解算数学模型k1(θ)·v+k2(θ)·v2+k3(θ)·v3=mg tanθ-max,其中,m为质量、g为重力加速度,θ为倾角,ax为加速度,v为空速,k1(θ)、k2(θ)、k3(θ)分别为已知的1、2、3阶风阻系数函数;
3、根据每一解算周期的所述空速解算数学模型定义函数f(v),其中,f(v)=k3(θ)·v3+k2(θ)·v2+k1(θ)·v-mg tanθ+max,所述θ倾角和所述ax加速度为实时测量值,并采用牛顿迭代算法实时求解方程f(v)=0的根,作为实时的空速v。
4、可选地,所述建立空速解算数学模型之前,包括:
5、在机体水平坐标系o-xyz下建立多旋翼6自由度动力学约束方程:
6、
7、其中,∑fp为螺旋桨旋转产生的总推力,∑fl为机身外形在气流场中运动所产生的升力,∑fd为整机气动总阻力,∑m为整机总力矩,j为整机转动惯量,a为质心线加速度,w为整机刚体运动角速度,α为整机刚体运动角加速度。
8、可选地,所述建立空速解算数学模型之前,还包括:
9、在姿态增稳、高度保持以及位置跟踪的控制律约束下,确定如下假设:
10、三轴姿态缓慢变化,三轴角速度ωx≈ωy≈ωz≈0,三轴加速度αx≈αy≈αz≈0;
11、垂直方向缓慢变化,垂直加速度az≈0;
12、三轴转动惯量缓慢变化
13、螺旋桨升力远远大于机体外形升力,即∑flx≈0,∑fly≈0,∑flz≈0。
14、可选地,所述建立空速解算数学模型之前,还包括:
15、根据所述假设简化所述多旋翼6自由度动力学约束方程,得到关于纵向、横向线运动的3自由度动力学方程:
16、
17、可选地,所述建立空速解算数学模型之前,还包括:
18、建立纵向运动动力学约束方程:
19、
20、其中,fprop为所述螺旋桨旋转产生的总推力,fdrag为所述整机气动总阻力。
21、可选地,所述建立空速解算数学模型之前,还包括:
22、建立纵向运动风阻气动约束方程:
23、fdrag=k1(θ)·v+k2(θ)·v2+k3(θ)·v3。
24、可选地,所述建立空速解算数学模型,包括:
25、根据所述纵向运动动力学约束方程和所述纵向运动风阻气动约束方程建立所述空速解算数学模型:
26、k1(θ)·v+k2(θ)·v2+k3(θ)·v3=mg tanθ-max。
27、可选地,所述方法还包括:
28、在地无风工况、或平稳流场工况、或紊乱阵风工况下,根据所述空速解算数学模型执行空速解算。
29、本发明还提出了一种多旋翼空速解算设备,该设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如上任一项所述的多旋翼空速解算方法的步骤。
30、本发明还提出了一种计算机可读存储介质,该计算机可读存储介质上存储有多旋翼空速解算程序,多旋翼空速解算程序被处理器执行时实现如上述任一项所述的多旋翼空速解算方法的步骤。
31、实施本发明的多旋翼空速解算方法、设备及计算机可读存储介质,通过建立空速解算数学模型k1(θ)·v+k2(θ)·v2+k3(θ)·v3=mg tanθ-max,其中,m为质量、g为重力加速度,θ为倾角,ax为加速度,v为空速,k1(θ)、k2(θ)、k3(θ)分别为预设的1、2、3阶风阻系数函数;根据每一解算周期的所述空速解算数学模型定义函数f(v),其中,f(v)=k3(θ)·v3+k2(θ)·v2+k1(θ)·v-mg tanθ+max,所述θ倾角和所述ax加速度为实时测量值,并采用牛顿迭代算法实时求解方程f(v)=0的根,作为实时的空速v。实现了一种基于动力学原理的空速解算方案,充分利用了动力学原理并结合多旋翼特有的控制方式,在不增加硬件传感器的情况下,以已知的姿态测量和加速度测量作为算法输入,并由软件算法解算出精度满足要求的空速数据,简化了硬件结构,降低了电气失效风险,节约了制造、调试和维护成本。
技术特征:
1.一种多旋翼空速解算方法,其特征在于,所述方法包括:
2.根据权利要求1所述的多旋翼空速解算方法,其特征在于,所述建立空速解算数学模型之前,包括:
3.根据权利要求2所述的多旋翼空速解算方法,其特征在于,所述建立空速解算数学模型之前,还包括:
4.根据权利要求3所述的多旋翼空速解算方法,其特征在于,所述建立空速解算数学模型之前,还包括:
5.根据权利要求4所述的多旋翼空速解算方法,其特征在于,所述建立空速解算数学模型之前,还包括:
6.根据权利要求5所述的多旋翼空速解算方法,其特征在于,所述建立空速解算数学模型之前,还包括:
7.根据权利要求6所述的多旋翼空速解算方法,其特征在于,所述建立空速解算数学模型,包括:
8.根据权利要求7所述的多旋翼空速解算方法,其特征在于,所述方法还包括:
9.一种多旋翼空速解算设备,其特征在于,所述设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1至8中任一项所述的多旋翼空速解算方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有多旋翼空速解算程序,所述多旋翼空速解算程序被处理器执行时实现如权利要求1至8中任一项所述的多旋翼空速解算方法的步骤。
技术总结
本发明公开了一种多旋翼空速解算方法、设备及计算机可读存储介质,其中,该方法包括:建立空速解算数学模型;根据每一解算周期的所述空速解算数学模型定义函数f(V),并结合实时测量的θ倾角和a<subgt;x</subgt;加速度,采用牛顿迭代算法实时求解方程f(V)=0的根,作为实时的空速V。本发明实现了一种基于动力学原理的空速解算方案,充分利用了动力学原理并结合多旋翼特有的控制方式,在不增加硬件传感器的情况下,以已知的姿态测量和加速度测量作为算法输入,并由软件算法解算出精度满足要求的空速数据,简化了硬件结构,降低了电气失效风险,节约了制造、调试和维护成本。
技术研发人员:胡华智,徐世科
受保护的技术使用者:亿航智能设备(广州)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!