一种应用于割草机器人的草地环境识别装置的制作方法
本技术涉及割草机器人,具体为一种应用于割草机器人的草地环境识别装置。
背景技术:
1、近年来,随着机器人越来越多地渗入到我们的生活中,具有自主感知、决策和执行功能的机器人得到了快速的发展,如扫地机器人和割草机器人。而割草机器人工作在户外非结构化环境中,相对于室内结构化环境,环境复杂、活动范围大。对地面和环境物体的识别有了更高的要求,也是草坪割草机器人的关键技术之一。现有的识别装置在进行使用时,不便于对装置进行快速安装固定,且在工作过程中,割草时的汁液和草屑会对识别装置造成遮挡,影响装置的识别,为此,我们提出一种应用于割草机器人的草地环境识别装置。
技术实现思路
1、本实用新型要解决的技术问题是克服现有的缺陷,提供一种应用于割草机器人的草地环境识别装置,能够进行快速安装拆卸,提高了安装拆卸的效率,且能对识别装置进行清理,避免汁液和草屑对识别装置造成遮挡,保证识别装置的正常使用,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种应用于割草机器人的草地环境识别装置,包括安装架和清理单元;
3、安装架:上表面设置有固定单元,安装架的下表面设置有安装槽,安装槽内设置有照明模组、光谱模组和透明板,所述透明板位于照明模组和光谱模组的正下方,照明模组的输入端电连接外部控制开关组的输出端,光谱模组的输出端电连接外部控制开关组的输入端;
4、清理单元:包含有支撑板、电机、螺杆、滑槽、滑块和毛刷辊,所述滑槽设置在安装槽的内部两侧,所述支撑板共两个且均设置在支撑板上,两个支撑板上均设置有电机,所述电机的输出轴连接螺杆,所述螺杆转动连接安装架,螺杆位于滑槽内的部分螺纹连接滑块,所述滑块滑动连接滑槽,两个滑块之间转动连接有毛刷辊,所述毛刷辊滑动连接透明板,电机的输入端电连接外部控制开关组的输出端。
5、通过固定单元把安装架连接在割草机器人上,割草机器人工作时,通过外部控制开关组控制照明模组工作,照明模组的光源通过透明板照射在草丛上,通过光谱模组对草丛反射的光进行收集,并把结果输送进外部控制开关组内,从而对反射光进行光谱分析,从而判断草地位置,割草机器人工作时,通过外部控制开关组控制电机工作,电机带动螺杆转动,螺杆带动滑块沿着滑槽移动,滑块带动毛刷辊移动,通过毛刷辊对透明板进行清理,避免草屑对透明板造成遮挡,保证照明模组和光谱模组能够通过透明板正常工作。
6、进一步的,所述固定单元包含有连接架、梯形槽、螺栓和升降组件,所述升降组件设置在安装架上,升降组件上设置有连接架,所述连接架上设置有梯形槽,连接架的两侧螺纹连接有螺栓,所述螺栓贯穿梯形槽。把梯形槽滑动连接在割草机器人上,并把螺栓安装到连接架上,从而把连接架连接在割草机器人上,工作时,通过升降组件带动安装架移动,从而对安装架的高度进行调整。
7、进一步的,所述升降组件包含有电动推杆,所述电动推杆设置在连接架上,电动推杆的伸缩端连接安装架,电动推杆的输入端电连接外部控制开关组的输出端。通过外部控制开关组控制电动推杆工作,电动推杆带动安装架移动。
8、进一步的,还包括测距传感器,所述测距传感器设置在安装架的下表面,测距传感器的输出端电连接外部控制开关组的输入端。安装架带动测距传感器移动,通过测距传感器测量安装架距离地面的距离,并把测量的结果输送进外部控制开关组内。
9、进一步的,还包括隔板和导向板,所述隔板共两个且分别设置在安装架的下表面两侧,隔板的两侧设置有导向板。通过隔板对安装架进行限位保护,避免接触到地面发生损伤,通过导向板对隔板进行导向,从而方便隔板在草丛中进行移动。
10、进一步的,还包括把手,所述把手共两个,且两个把手分别设置在安装架的两侧。通过把手便于对安装架进行移动。
11、与现有技术相比,本实用新型的有益效果是:
12、1、通过透明板对照明模组和光谱模组进行隔离保护,避免割草的汁液和草屑对照明模组和光谱模组造成污染,电机通过螺杆和滑块带动毛刷辊移动,通过毛刷辊对透明板表面进行清理,避免割草的汁液和草屑遮挡在透明板上影响照明模组和光谱模组的正常使用,从而能够对草地进行正常识别。
13、2、通过连接架、梯形槽和螺栓把安装架快速安装到割草机器人上,提高了整个识别装置进行快速安装拆卸,通过电动推杆对安装架的高度进行调整,从而对照明模组和光谱模组的高度进行调整,从而能够更好的进行识别。
技术特征:
1.一种应用于割草机器人的草地环境识别装置,其特征在于:包括安装架(1)和清理单元(2);
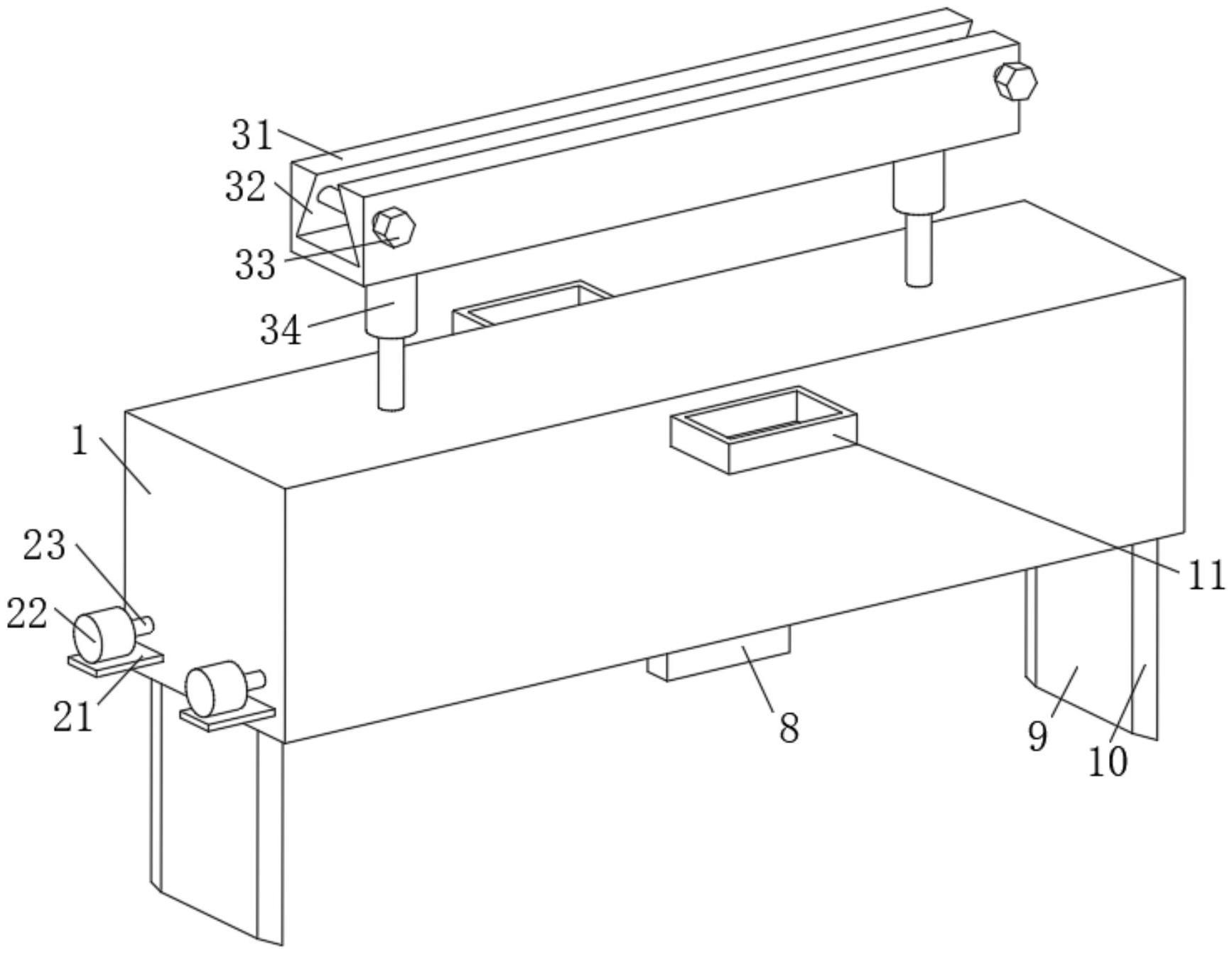
2.根据权利要求1所述的一种应用于割草机器人的草地环境识别装置,其特征在于:所述固定单元(3)包含有连接架(31)、梯形槽(32)、螺栓(33)和升降组件,所述升降组件设置在安装架(1)上,升降组件上设置有连接架(31),所述连接架(31)上设置有梯形槽(32),连接架(31)的两侧螺纹连接有螺栓(33),所述螺栓(33)贯穿梯形槽(32)。
3.根据权利要求2所述的一种应用于割草机器人的草地环境识别装置,其特征在于:所述升降组件包含有电动推杆(34),所述电动推杆(34)设置在连接架(31)上,电动推杆(34)的伸缩端连接安装架(1),电动推杆(34)的输入端电连接外部控制开关组的输出端。
4.根据权利要求1所述的一种应用于割草机器人的草地环境识别装置,其特征在于:还包括测距传感器(8),所述测距传感器(8)设置在安装架(1)的下表面,测距传感器(8)的输出端电连接外部控制开关组的输入端。
5.根据权利要求1所述的一种应用于割草机器人的草地环境识别装置,其特征在于:还包括隔板(9)和导向板(10),所述隔板(9)共两个且分别设置在安装架(1)的下表面两侧,隔板(9)的两侧设置有导向板(10)。
6.根据权利要求1所述的一种应用于割草机器人的草地环境识别装置,其特征在于:还包括把手(11),所述把手(11)共两个,且两个把手(11)分别设置在安装架(1)的两侧。
技术总结
本技术公开了一种应用于割草机器人的草地环境识别装置,涉及割草机器人技术领域,包括安装架和清理单元;安装架上表面设置有固定单元,安装架的下表面设置有安装槽,安装槽内设置有照明模组、光谱模组和透明板,透明板位于照明模组和光谱模组的正下方,照明模组的输入端电连接外部控制开关组的输出端,光谱模组的输出端电连接外部控制开关组的输入端;清理单元包含有支撑板、电机、螺杆、滑槽、滑块和毛刷辊,滑槽设置在安装槽的内部两侧,支撑板共两个且均设置在支撑板上。本技术能够进行快速安装拆卸,提高了安装拆卸的效率,且能对识别装置进行清理,避免汁液和草屑对识别装置造成遮挡,保证识别装置的正常使用。
技术研发人员:吴美娟,孙国平,吴正荣,索朗群培
受保护的技术使用者:西藏金草新绿生态发展有限公司
技术研发日:20221009
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!