非接触输入装置和非接触输入方法与流程
本发明涉及非接触输入装置和非接触输入方法。
背景技术:
1、存在如下装置:向空中的特定范围投射包含按钮等各种输入区域的实像的面,检测手指等操作单元针对该面的进入,按照该操作单元进入的坐标进行各种动作(例如参照专利文献1)。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2019-133284号公报
技术实现思路
1、发明要解决的课题
2、但是,在现有的技术中,一般对作为空中的操作单元而检测到的坐标施加时变的噪声,根据检测原理而存在大小,但是,该坐标小幅地振动。如果不去除该振动,则检测坐标的精度降低。
3、因此,本发明的一个或多个方式的目的在于,在以非接触的方式输入操作时,去除检测到操作单元时的噪声,能够高精度地检测其坐标。
4、用于解决课题的手段
5、本发明的一个方式的非接触输入装置的特征在于,所述非接触输入装置具有:三维操作坐标检测部,其依次检测输入指示的物体即指示输入物体在预先确定的空间中的三轴的坐标即三维操作坐标,由此检测多个三维操作坐标;平滑化处理部,其使用所述多个三维操作坐标中包含的第一数量的三维操作坐标进行平滑化,由此计算平滑化三维操作坐标,其中,所述第一数量是预先确定的两个以上的数量;以及通过判断部,其使用所述平滑化三维操作坐标,确定所述指示输入物体通过了所述空间中预先确定的范围即空中受理范围的坐标即通过坐标。
6、本发明的一个方式的非接触输入方法的特征在于,依次检测输入指示的物体即指示输入物体在预先确定的空间中的三轴的坐标即三维操作坐标,由此检测多个三维操作坐标,使用所述多个三维操作坐标中包含的第一数量的三维操作坐标进行平滑化,由此计算平滑化三维操作坐标,其中,所述第一数量是预先确定的两个以上的数量,使用所述平滑化三维操作坐标,确定所述指示输入物体通过了所述空间中预先确定的范围即空中受理范围的坐标即通过坐标。
7、发明效果
8、根据本发明的一个或多个方式,在以非接触的方式输入操作时,去除检测到操作单元时的噪声,能够高精度地检测其坐标。
技术特征:
1.一种非接触输入装置,其特征在于,所述非接触输入装置具有:
2.根据权利要求1所述的非接触输入装置,其特征在于,
3.根据权利要求2所述的非接触输入装置,其特征在于,
4.根据权利要求3所述的非接触输入装置,其特征在于,
5.根据权利要求1所述的非接触输入装置,其特征在于,
6.根据权利要求5所述的非接触输入装置,其特征在于,
7.根据权利要求6所述的非接触输入装置,其特征在于,
8.根据权利要求2~7中的任意一项所述的非接触输入装置,其特征在于,
9.根据权利要求2~7中的任意一项所述的非接触输入装置,其特征在于,
10.根据权利要求9所述的非接触输入装置,其特征在于,
11.根据权利要求10所述的非接触输入装置,其特征在于,
12.根据权利要求2~11中的任意一项所述的非接触输入装置,其特征在于,
13.根据权利要求9~11中的任意一项所述的非接触输入装置,其特征在于,
14.根据权利要求12或13所述的非接触输入装置,其特征在于,
15.根据权利要求12或13所述的非接触输入装置,其特征在于,
16.根据权利要求2~15中的任意一项所述的非接触输入装置,其特征在于,
17.根据权利要求2~16中的任意一项所述的非接触输入装置,其特征在于,
18.根据权利要求2~17中的任意一项所述的非接触输入装置,其特征在于,
19.根据权利要求1~18中的任意一项所述的非接触输入装置,其特征在于,
20.根据权利要求1~18中的任意一项所述的非接触输入装置,其特征在于,
21.一种非接触输入方法,其特征在于,
技术总结
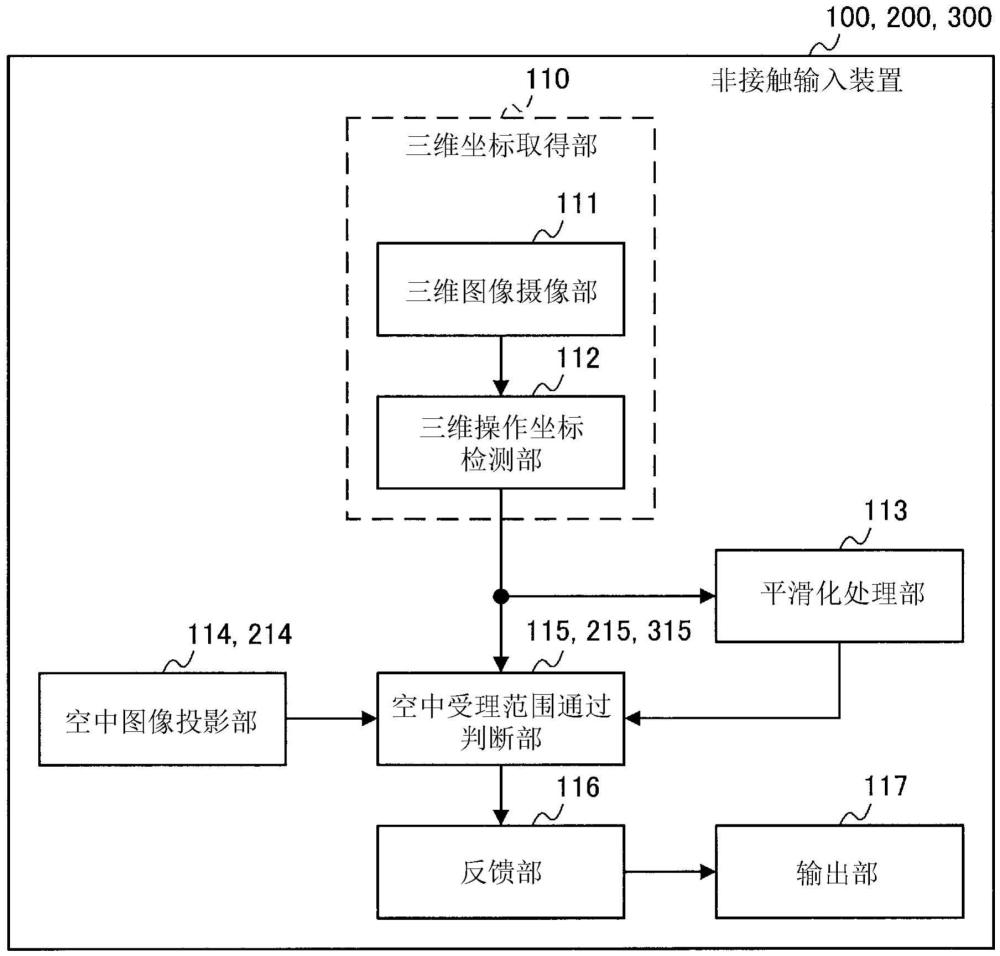
非接触输入装置(100)具有:三维操作坐标检测部(112),其依次检测输入指示的物体即指示输入物体在预先确定的空间中的三轴的坐标即三维操作坐标,由此检测多个三维操作坐标;平滑化处理部(113),其使用多个三维操作坐标中包含的第一数量的三维操作坐标进行平滑化,由此计算平滑化三维操作坐标,其中,所述第一数量是预先确定的两个以上的数量;以及空中受理范围通过判断部(115),其使用平滑化三维操作坐标,确定指示输入物体通过了该空间中预先确定的范围即空中受理范围的坐标即通过坐标。
技术研发人员:津田圭一,菊田勇人,常道大智
受保护的技术使用者:三菱电机株式会社
技术研发日:
技术公布日:2024/10/31
- 还没有人留言评论。精彩留言会获得点赞!