一种煤矿井下高速风表指针示数读取方法与流程
本发明涉及煤矿井下视觉图像处理算法的,尤其是一种煤矿井下高速风表指针示数读取方法。
背景技术:
1、目前,机器视觉在多个领域已经有相对成熟的应用案例,例如在工业视觉检测、医疗影像诊断、智能驾驶及视频分析等领域,利用视觉图像处理算法能够实现高效精准的检测。在煤矿行业,机器视觉图像处理算法逐渐应用到煤矿井下多个场景,由于机器视觉算法是唯一非接触式识别、测量物体的前沿技术,且成本低廉便于维护等优势,逐渐替代煤矿领域传统的传感器。
2、煤矿井下高速风表的指针示数目前都是由人工记录,无法做到实时图像的存储和高速风表指针示数上传到数据库,且增加人力成本。
3、为了提高煤矿井下高速风表指针示数智能抄录和上传,降低人力成本,提出一种煤矿井下高速风表指针示数读取方法。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。
2、为此,本发明提出一种煤矿井下高速风表指针示数读取方法,能够做到实时高速风表示数的检测和上传,大大降低人工成本,且系统硬件简单便于维护,算法鲁棒性较优。
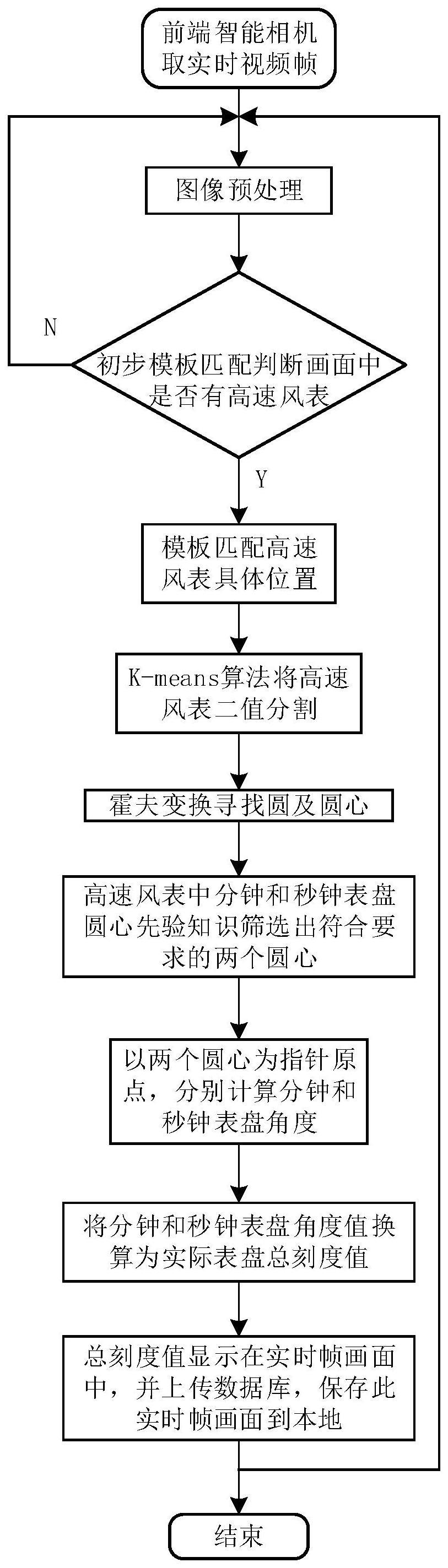
3、根据本发明实施例的煤矿井下高速风表指针示数读取方法,包括以下步骤:
4、第1步骤、前端智能相机获取实时视频帧;
5、第2步骤、对获取的实时视频帧进行图像预处理操作,该图像预处理操作包括对图像进行灰度化处理;
6、第3步骤、利用模板匹配算法初步判断灰度化处理后的图像画面中是否有高速风表;当判断画面中没有高速风表时,则回到前端智能相机获取实时视频帧的阶段;当判断画面中有高速风表时,则进入下一步;
7、第4步骤、模板匹配高速风表的具体位置;
8、第5步骤、利用k-means聚类算法将高速风表的图像二值化分割;
9、第6步骤、利用霍夫变换算法寻找经过二值化分割的高速风表图像的圆和圆心;
10、第7步骤、利用高速风表中分钟表盘圆心的先验知识和秒钟表盘圆心的先验知识筛选出符合要求的两个圆心;
11、第8步骤、以筛选出的两个圆心为指针原点,分别计算分钟表盘角度值和秒钟表盘角度值;
12、第9步骤、将分钟表盘角度值和秒钟表盘角度值换算为实际表盘总刻度值;
13、第10步骤、将实际表盘总刻度值显示在实时帧画面中,并上传数据库,保存此实时帧画面到本地。
14、本发明的有益效果是,其基于视频图像处理的检测算法,属于非接触式识别算法,能够做到实时高速风表示数的检测和上传,即实现精确读取高速风表指针实时示数并将示数上传数据库,系统硬件结构简单,易于安装和维护,降低人工巡查记录指针示数的强度,大大降低节省人工成本,算法鲁棒性较优。
15、根据本发明一个实施例,在第3步骤中,当利用模板匹配算法初步判断灰度化处理后的图像画面中没有高速风表时,则重新获取下一帧灰度化后的图像进行匹配。
16、根据本发明一个实施例,在第3步骤中,当利用模板匹配算法初步判断灰度化处理后的图像画面中有高速风表时,且匹配到的高速风表满足模板匹配算法设定的阈值,则进入下一步。
17、根据本发明一个实施例,在第4步骤中,利用模板匹配算法进行精细匹配,获取模板匹配的矩形图像坐标,并以此矩形图像作为下一阶段的k-means聚类算法处理的输入部分。
18、根据本发明一个实施例,在第5步骤中,利用k-means聚类算法将模板匹配后的矩形图像进行二值分割处理。
19、根据本发明一个实施例,在第6步骤中,利用霍夫变换算法在二值分割后的矩形图像中寻找所有圆和圆心。
20、根据本发明一个实施例,所述k-means聚类算法的具体过程如下:
21、第5.1步骤、随机选取聚类中心;
22、第5.2步骤、根据当前聚类中心,利用选定的度量方式,分类所有样本点;
23、第5.3步骤、计算当前每一类的样本点的均值,作为下一次迭代的聚类中心;
24、第5.4步骤、计算下一次迭代的聚类中心与当前聚类中心的差距;
25、第5.5步骤、当第5.4步骤中的差距小于给定迭代阈值时,迭代结束;当第5.4步骤中的差距大于等于给定迭代阈值时,则回至第5.2步骤继续下一次迭代。
26、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
27、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种煤矿井下高速风表指针示数读取方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种煤矿井下高速风表指针示数读取方法,其特征在于:在第3步骤中,当利用模板匹配算法初步判断灰度化处理后的图像画面中没有高速风表时,则重新获取下一帧灰度化后的图像进行匹配。
3.根据权利要求1所述的一种煤矿井下高速风表指针示数读取方法,其特征在于:在第3步骤中,当利用模板匹配算法初步判断灰度化处理后的图像画面中有高速风表时,且匹配到的高速风表满足模板匹配算法设定的阈值,则进入下一步。
4.根据权利要求3所述的一种煤矿井下高速风表指针示数读取方法,其特征在于:在第4步骤中,利用模板匹配算法进行精细匹配,获取模板匹配的矩形图像坐标,并以此矩形图像作为下一阶段的k-means聚类算法处理的输入部分。
5.根据权利要求4所述的一种煤矿井下高速风表指针示数读取方法,其特征在于:在第5步骤中,利用k-means聚类算法将模板匹配后的矩形图像进行二值分割处理。
6.根据权利要求5所述的一种煤矿井下高速风表指针示数读取方法,其特征在于:在第6步骤中,利用霍夫变换算法在二值分割后的矩形图像中寻找所有圆和圆心。
7.根据权利要求1所述的一种煤矿井下高速风表指针示数读取方法,其特征在于:所述k-means聚类算法的具体过程如下:
技术总结
本发明公开了一种煤矿井下高速风表指针示数读取方法,前端智能相机获取实时视频帧;灰度化处理;模板匹配算法初步判断画面中是否有高速风表;模板匹配高速风表的具体位置;K‑means聚类算法将高速风表的图像二值化分割;霍夫变换寻找圆和圆心;利用高速风表中分钟和秒钟表盘圆心的先验知识筛选出符合要求的两个圆心;以两个圆心为指针原点,分别计算分钟表盘角度值和秒钟表盘角度值;将分钟表盘角度值和秒钟表盘角度值换算为实际表盘总刻度值;将实际表盘总刻度值显示在实时帧画面中,并上传数据库,保存此实时帧画面到本地。该方法能够做到实时高速风表示数的检测和上传,大大降低人工成本,且系统硬件简单便于维护,算法鲁棒性较优。
技术研发人员:季亮,陈晓晶,周李兵,郝大彬,黄小明,宋鹏飞,卞俊,何敏,姚超修,卜滕滕
受保护的技术使用者:天地(常州)自动化股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!