基于三维点云的电力巡检地物分类方法及存储介质与流程
本发明涉及点云识别,尤其涉及一种基于三维点云的电力巡检地物分类方法及存储介质。
背景技术:
1、定期监测电力线路的状态以确保安全可靠的传输至关重要,通过电力巡检才能维护电力线路,以确保稳定、长久地供电。进行电力巡检,对庞大的电力线路网络而言耗时且费力,是一项极具挑战性的任务。目前,巡检方式分为两大类,一类是由工作人员亲临现场的传统人工巡检;另一类是利用传感器技术的遥感数据巡检。第一类可以细分为人工巡检、载人直升机巡检、望远镜巡检等类别。传统的电力巡检需要检修工人沿着电力走廊步行进行检查,而在对电塔检修时,则需要攀爬杆塔才能对电塔的顶部进行全面检查。因此,传统人工电力巡检的方法耗时耗力,巡检人员受限于恶劣天气、地形复杂的影响,且还可能会面临高空坠落与触电的风险。
2、三维点云遥感数据以其获取的高效性、便利性和安全性等优势,越来越广泛地运用在电力巡检上。三维点云数据通常通过激光雷达扫描获得,激光雷达系统是一种主动传感器,并不受光照条件影响,可以以点云的形式提供密集的三维数据,用于重建物体表面和场景的复杂三维细节。一般地,激光扫描数据可分为机载和地面测量方法。
3、机载激光扫描(airborne laser scanning,als)或无人机系统激光扫描(unmanned aircraft systems laser scanning,uls)等机载系统配备激光扫描传感器和其他辅助传感器,如全球导航卫星系统(global navigation satellite system,gnss)和惯性导航系统(inertial navigation system,ins)。als有利于在人员或车辆难以进入的大区域收集点密度相对均匀的扫描数据。然而,鉴于高处的扫描几何结构,als通常仅在多层电力线的较低层上获取部分扫描数据,这是由于上面的电力线掩盖了较低的电力线。uls在野外作业风险与成本较低,且作业更加灵活,对较高层的电力线,获取的数据也更加均匀密集。
4、基于地面的测量可以通过地面激光扫描(terrestrial laser scanning,tls)或移动激光扫描(mobile laser scanning,mls)系统获取,与als相比,它们可以提供更密集和准确的扫描数据。
5、因此,电力线和电塔点云的获取方式多样,针对不同的场景可以快速准确地获取大规模场景下的电力线三维空间信息。但是,由激光雷达扫描获取的海量数据仍需要人工判读得到最终巡检报告。
6、将激光扫描三维点云进行电力线地物分类的原因归纳为如下几个方面:
7、(1)激光雷达对电力线及电塔进行扫描所得到的数据比遥感图像更加清晰可分辨,通过先对数据进行预处理,对杆塔位置进行判别,利用不同位置实现杆塔分割和电力线分割,再进行不同电力线的细化;
8、(2)良好的评价标准可以评估点云地物的分类精度,检测出的模型问题部分有利于系统校准误差,便于重新采集数据以及简化巡检方式等;
9、(3)评价后的点云模型可以直观显示出点云进行地物分类过程中出现的问题,可以为进一步实时采集数据进行预防和报警。对于电力线目标数字化以及分类识别等方面具有重要的作用。
10、目前,对于基于激光扫描三维点云的电力线地物分类主要受到以下几个方面的约束:
11、首先,数据量不足,样本库质量不高。当前公开可用的输电线路数据集十分少,已有的输电线路数据集相比于其他室外大型场景数据集,如semantickitti、semantic3d等,明显存在着点数分布极其不均的特点。在一个场景中,输电杆塔和输电线的点数占比可能只有2%以下,地面(包含植被)点数数量占据绝对优势。此外,输电杆塔相距较远,这导致在一个场景中电塔存在很少,如果对原始数据直接使用深度学习的方法,网络模型很难学到相关特征。
12、其次,计算时间复杂度,计算成本较大。机载激光雷达可以获取大量点云数据,通常一条输电线路的场景,包含的点云数量可能是几亿或几十亿的数量级,这就带来了如何快速处理庞大数量点云这一问题。现有的方法通常是手工计算描述算子,然后去处理每一个点,这样时间复杂度就比较高。
13、再者,方法泛化能力太弱。基于传统手工计算的方法,根据数据集中特定的杆塔形状,手动计算几何特征,只能应用于这些特定数据集。虽然,也有学者提出一些普适方法,但精度仍然不高。因此,相比继续使用传统手工计算方法,探索利用目前现有的一些深度学习方法,实现电力线和电力杆塔的快速准确提取是目前要解决的问题。
技术实现思路
1、本发明所要解决的技术问题是:提供一种基于三维点云的电力巡检地物分类方法及存储介质,可快速准确地识别出输电线和杆塔。
2、为了解决上述技术问题,本发明采用的技术方案为:一种基于三维点云的电力巡检地物分类方法其特征在于,包括:
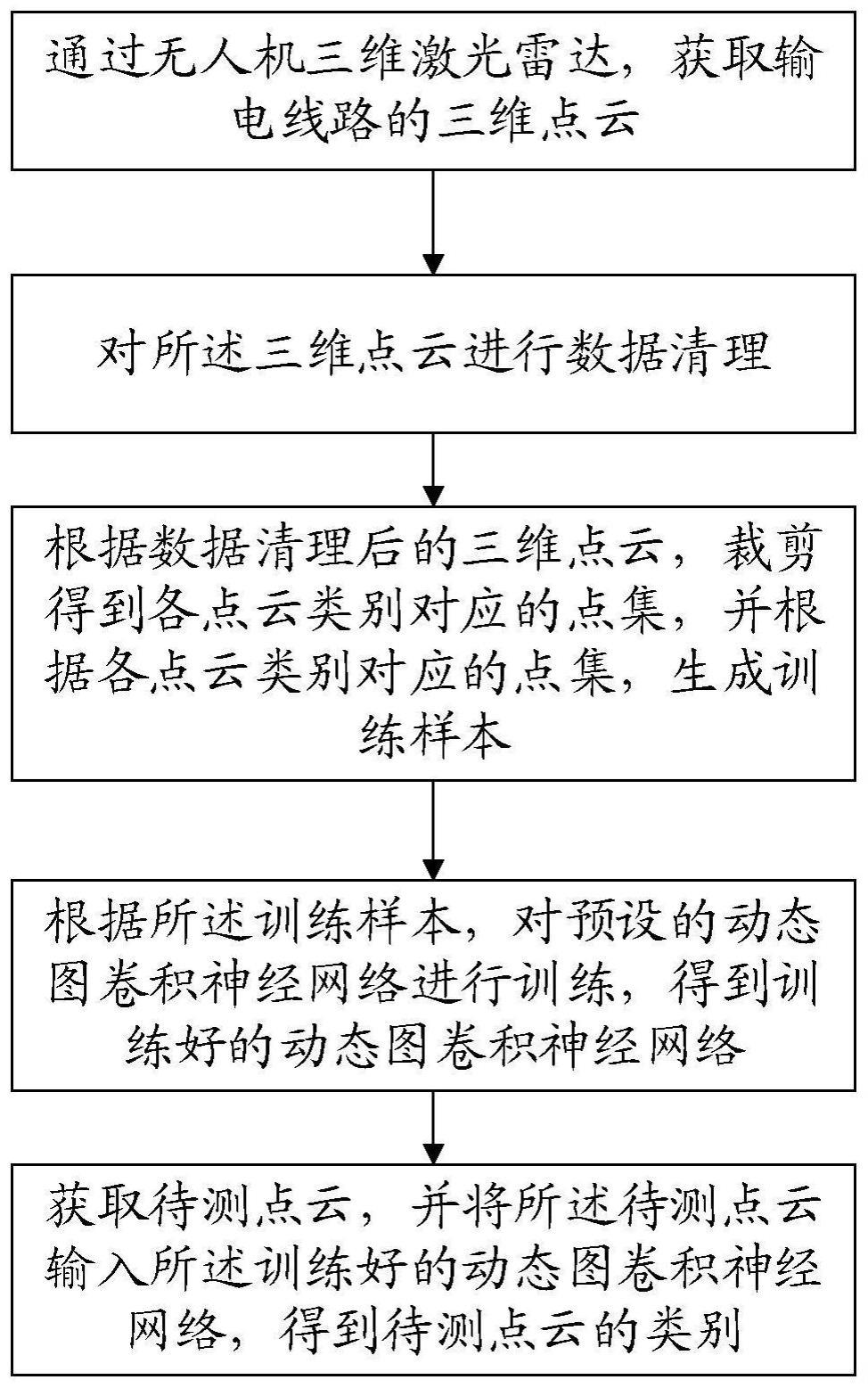
3、通过无人机三维激光雷达,获取输电线路的三维点云;
4、对所述三维点云进行数据清理;
5、根据数据清理后的三维点云,裁剪得到各点云类别对应的点集,并根据各点云类别对应的点集,生成训练样本;
6、根据所述训练样本,对预设的动态图卷积神经网络进行训练,得到训练好的动态图卷积神经网络;
7、获取待测点云,并将所述待测点云输入所述训练好的动态图卷积神经网络,得到待测点云的类别。
8、本发明还提出一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如上所述的方法。
9、本发明的有益效果在于:通过对获得的三维点云进行数据清理,可去除一些干扰物的点云数据,减少处理数据量,且可提高后续识别结果的准确性;通过动态图卷积神经网络,可直接对点云进行识别分类,且可学习点集的语义信息,能够非常好地提取点云局部形状的特征,从而可快速准确地识别出输电线和杆塔。
技术特征:
1.一种基于三维点云的电力巡检地物分类方法,其特征在于,包括:
2.根据权利要求1所述的基于三维点云的电力巡检地物分类方法,其特征在于,所述对所述三维点云进行数据清理,包括:
3.根据权利要求2所述的基于三维点云的电力巡检地物分类方法,其特征在于,所述对所述三维点云进行去噪,具体为:
4.根据权利要求2所述的基于三维点云的电力巡检地物分类方法,其特征在于,所述对去噪后的三维点云进行稀疏点分离,具体为:
5.根据权利要求2所述的基于三维点云的电力巡检地物分类方法,其特征在于,所述对稀疏点分离后的三维点云进行滤波处理,具体为:
6.根据权利要求1所述的基于三维点云的电力巡检地物分类方法,其特征在于,所述根据数据清理后的三维点云,裁剪得到各点云类别对应的点集,并根据各点云类别对应的点集,生成训练样本具体为:
7.根据权利要求6所述的基于三维点云的电力巡检地物分类方法,其特征在于,所述根据预设的杆塔裁剪尺寸,在所述数据清理后的三维点云中裁剪得到至少一个的杆塔及其附件点集具体为:
8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1-7任一项所述的方法。
技术总结
本发明公开了一种基于三维点云的电力巡检地物分类方法及存储介质,方法包括:通过无人机三维激光雷达,获取输电线路的三维点云;对所述三维点云进行数据清理;根据数据清理后的三维点云,裁剪得到各点云类别对应的点集,并根据各点云类别对应的点集,生成训练样本;根据所述训练样本,对预设的动态图卷积神经网络进行训练,得到训练好的动态图卷积神经网络;获取待测点云,并将所述待测点云输入所述训练好的动态图卷积神经网络,得到待测点云的类别。本发明可快速准确地识别出输电线和杆塔。
技术研发人员:朱厦,李强,臧志斌,张春光,赵光,赵峰,李静,夏传福,王霁野,刘琦,龙强,赵光俊,谈辉,张艺林,丁士帅,安文强,杨博,张晓曼,赵林林,王誉博
受保护的技术使用者:国网思极位置服务有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!