一种标定精度评估方法、装置和电子设备、存储介质与流程
本申请涉及数据处理,尤其涉及一种标定精度评估方法、装置和电子设备、存储介质。
背景技术:
1、智能交通系统中通过无线通信和互联网等技术,实现了车与车之间、以及车与道路之间实时信息的动态交换,也即实现车路协同。路侧感知系统为车路协同的实现提供了超视距的感知信息。相机作为路侧感知系统中最主要的传感器之一,其标定精度决定了相机对道路上的障碍物的感知精度。因此,有必要对相机的标定精度进行评估。
2、现有技术中的评估方法通常都是人为设置标定参考物,从标定参考物上选择少量的标志点进行正投影到图像上,然后计算投影点与图像原始像素点之间的像素坐标偏差,根据这些标志点的投影总误差或平均误差对相机的标定参数进行评估。
3、上述评估方法需要人为设置标定参考物,标定参考物的设置局限将导致标定精度的评估过程存在局限,且标定参考物上可选取的标志点的数量较少,使得评估结果并不可靠。
技术实现思路
1、基于现有技术中存在的上述问题,本申请实施例提供了一种标定精度评估方法、装置和电子设备、存储介质,以克服人为设置标定参考物的局限性,并提高标定精度评估结果的可靠性。
2、本申请实施例采用下述技术方案:
3、第一方面,本申请实施例提供一种标定精度评估方法,所述方法包括:
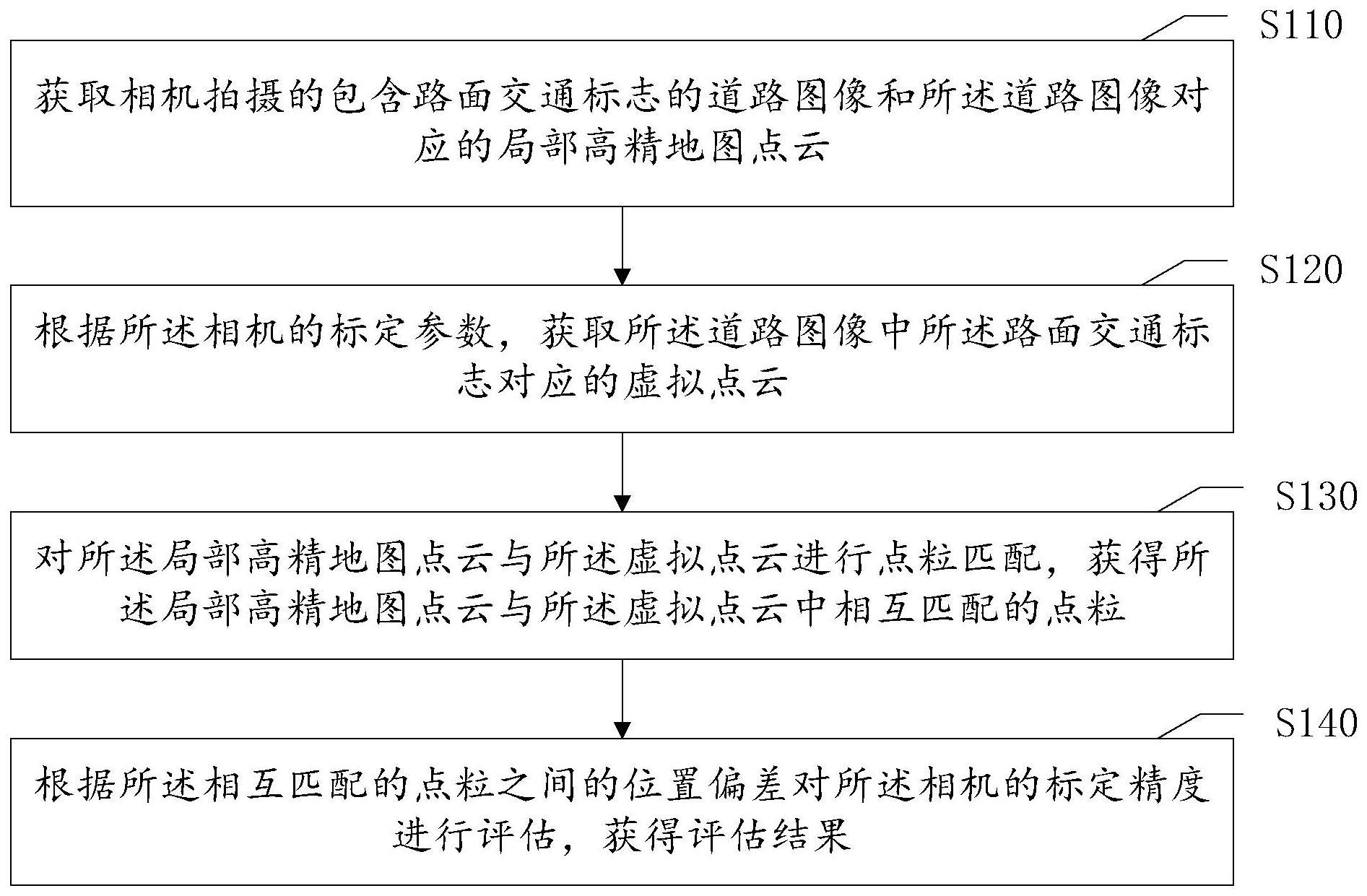
4、获取相机拍摄的包含路面交通标志的道路图像和所述道路图像对应的局部高精地图点云;
5、根据所述相机的标定参数,获取所述道路图像中所述路面交通标志对应的虚拟点云;
6、对所述局部高精地图点云与所述虚拟点云进行点粒匹配,获得所述局部高精地图点云中与所述虚拟点云中相互匹配的点粒;
7、根据所述相互匹配的点粒之间的位置偏差对所述相机的标定精度进行评估,获得评估结果。
8、可选地,所述对所述局部高精地图点云与所述虚拟点云进行点粒匹配,获得所述局部高精地图点云与所述虚拟点云中相互匹配的点粒,包括:
9、采用最小欧式距离匹配算法从所述局部高精地图点云确定出于所述虚拟点云中的每个点粒相匹配的真值点粒。
10、可选地,所述对所述局部高精地图点云与所述虚拟点云进行点粒匹配,获得所述局部高精地图点云与所述虚拟点云中相互匹配的点粒,包括:
11、通过可视化软件对所述虚拟点云与所述局部高精地图点云进行可视化展示;
12、根据所述虚拟点云与所述局部高精地图点云的可视化展示结果,通过点粒选择指令,确定所述局部高精地图点云与所述虚拟点云中相互匹配的点粒。
13、可选地,所述评估结果包括可视化评估结果,所述根据所述相互匹配的点粒之间的位置偏差对所述相机的标定精度进行评估,包括:
14、对所述可视化软件的点云可视化展示界面进行图像截取,所述点云可视化展示界面对所述虚拟点云与所述局部高精地图点云进行同屏幕的叠加展示,且所述虚拟点云与所述局部高精地图点云的点粒具有不同的可视化效果;
15、将截取到的图像作为所述可视化评估结果。
16、可选地,所述评估结果包括标定误差评估结果,所述根据所述相互匹配的点粒之间的位置偏差对所述相机的标定精度进行评估,包括:
17、获取每个相互匹配的点粒之间的位置偏差值;
18、以所述虚拟点云中点粒与所述相机之间的距离信息为横轴,以每个点粒对应的位置偏差为纵轴,构建标定误差拟合曲线;
19、将所述标定误差拟合曲线确定为所述标定误差评估结果。
20、可选地,所述根据所述相机的标定参数,获取所述道路图像中所述路面交通标志对应的虚拟点云,包括:
21、对所述道路图像进行目标检测,得到路面交通标志的区域信息;
22、根据所述路面交通标志的区域信息,获取所述路面交通标志的前景像素点的图像像素坐标;
23、根据所述相机的标定参数和所述路面交通标志的前景像素点的图像像素坐标,获取所述路面交通标志的前景像素点对应的虚拟点云。
24、可选地,所述对所述道路图像进行目标检测,得到路面交通标志的区域信息,包括:
25、基于自适应阈值算法将所述道路图像转换为mask图像,对所述mask图像与所述道路图像进行交集处理,得到所述路面交通标志的mask子图像;
26、所述根据所述路面交通标志的区域信息,获取所述路面交通标志的前景像素点的图像像素坐标,包括:
27、根据所述路面交通标志的mask子图像中像素点的像素值,获取所述路面交通标志的前景像素点的图像像素坐标。
28、第二方面,本申请实施例还提供一种标定精度评估装置,所述装置包括:
29、获取单元,用于获取相机拍摄包含的路面交通标志的道路图像和所述道路图像对应的局部高精地图点云;
30、计算单元,用于根据所述相机的标定参数,获取所述道路图像中所述路面交通标志对应的虚拟点云;
31、匹配单元,用于对所述局部高精地图点云与所述虚拟点云进行点粒匹配,获得所述局部高精地图点云与所述虚拟点云中相互匹配的点粒;
32、评估单元,用于根据所述相互匹配的点粒之间的位置偏差对所述相机的标定精度进行评估,获得评估结果。
33、第三方面,本申请实施例还提供一种电子设备,包括:
34、处理器;以及
35、被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行标定精度评估方法。
36、第四方面,本申请实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被包括多个应用程序的电子设备执行时,使得所述电子设备执行标定精度评估方法。
37、本申请实施例采用的上述至少一个技术方案能够达到以下有益效果:本申请实施例首先获取相机拍摄的道路图像和相应的局部高精地图点云,然后从道路图像中的路面交通标识处获取大量像素点为参考点,基于相机的标定参数确定出这些像素点对应的虚拟点云,接着确定出虚拟点云与局部高精地图点云中相互匹配的点粒,最后根据这些相互匹配的点粒之间的位置偏差对相机的标定精度进行评估。
38、本申请实施例的评估过程无需人为设置标定路面上的标定参考物,因此可以避免基于标定参考物的评估方法的局限性;且道路图像中的路面交通标识一般占用道路图像的全局区域或大部分区域,因此评估方法可以使用足够数量的参考点,且参考点数量能够覆盖整个图像区域或大部分图像区域,能够提高评估结果的可靠性。
技术特征:
1.一种标定精度评估方法,其特征在于,所述方法包括:
2.如权利要求1所述的标定精度评估方法,其特征在于,所述对所述局部高精地图点云与所述虚拟点云进行点粒匹配,获得所述局部高精地图点云与所述虚拟点云中相互匹配的点粒,包括:
3.如权利要求1所述的标定精度评估方法,其特征在于,所述对所述局部高精地图点云与所述虚拟点云进行点粒匹配,获得所述局部高精地图点云与所述虚拟点云中相互匹配的点粒,包括:
4.如权利要求3所述的标定精度评估方法,其特征在于,所述评估结果包括可视化评估结果,所述根据所述相互匹配的点粒之间的位置偏差对所述相机的标定精度进行评估,包括:
5.如权利要求2所述的标定精度评估方法,其特征在于,所述评估结果包括标定误差评估结果,所述根据所述相互匹配的点粒之间的位置偏差对所述相机的标定精度进行评估,包括:
6.如权利要求1所述的标定精度评估方法,其特征在于,所述根据所述相机的标定参数,获取所述道路图像中所述路面交通标志对应的虚拟点云,包括:
7.如权利要求6所述的标定精度评估方法,其特征在于,所述对所述道路图像进行目标检测,得到路面交通标志的区域信息,包括:
8.一种标定精度评估装置,其特征在于,所述装置包括:
9.一种电子设备,包括:
10.一种计算机可读存储介质,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被包括多个应用程序的电子设备执行时,使得所述电子设备执行权利要求1~7任一项所述的标定精度评估方法。
技术总结
本申请公开了一种标定精度评估方法、装置和电子设备、存储介质。本申请的方法包括:获取相机拍摄的路面交通标志的道路图像和所述相机对应的局部高精地图点云;根据所述相机的标定参数,获取所述道路图像中所述路面交通标志对应的虚拟点云;对所述局部高精地图点云与所述虚拟点云进行点粒匹配,获得所述局部高精地图点云与所述虚拟点云中相互匹配的点粒;根据所述相互匹配的点粒之间的位置偏差对所述相机的标定精度进行评估,获得评估结果。本申请的技术方案能够避免基于标定参考物的评估方法的局限性,且能够提高评估结果的可靠性。
技术研发人员:袁兴
受保护的技术使用者:智道网联科技(北京)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!