一种多参数相互融合的清管器实时定位方法及装置与流程
本申请涉及油气储运领域,尤其涉及一种多参数相互融合的清管器实时定位方法及装置。
背景技术:
1、石油和天然气作为重要的能源物资,影响着国民经济与各行各业的发展,与人民的生活息息相关,管道作为石油和天然气输送的主要方式,其相比于道路运输具有安全、经济、便捷等特点。在管道运输的过程中,清管作业是油气长输管道投产前和运行中的一项重要且必不可少的工作,清管的作用包括增加流量,提高生产效率,减少内部腐蚀,保障安全生产,降低维护费用,实现在线检测,延长管道寿命等。
2、管道通过指示仪是油气管道清管器安全运行最有效的监测技术,清管器携带的电子发射机在管道内运行,并不间断、规律的发出电磁信号,信号穿过管壁传出,发射出来的电磁信号通过通过指示仪探头接收,通过指示仪主机处理后发出峰鸣和毫安表指针信号指示;通过指示仪通过发射机与通过指示仪之间的信号传递,可以判断管道清管器是否通过固定检测点。
3、在现有的清管器定位的方案中,发明人发现至少存在以下问题:在管道通过指示仪的使用过程中,通过接收电磁信号来判断清管器是否通过指示仪,但是无法对清管器的位置进行实时的定位,无法达到国家应急体系对油气管道安全运输的要求。
技术实现思路
1、本申请提供了一种多参数相互融合的清管器实时定位方法及装置,以解决现有技术中在无法对清管器的位置进行实时的定位,导致无法达到国家应急体系对油气管道安全运输的要求的问题。
2、第一方面,本申请实施例提供一种多参数相互融合的清管器实时定位方法,包括:
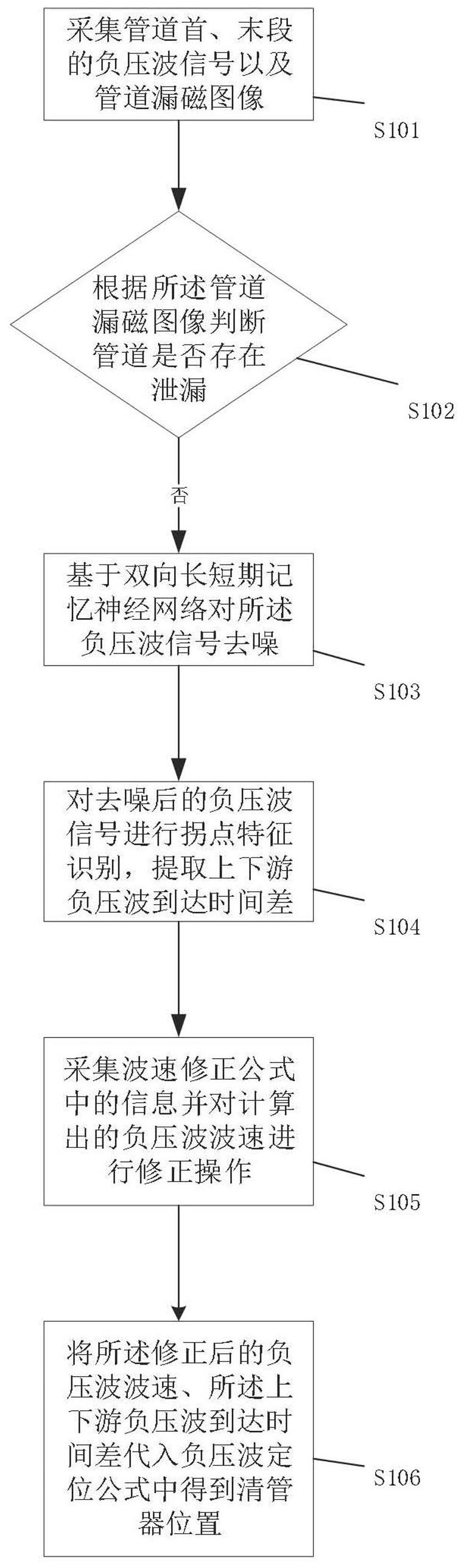
3、采集管道首、末段的负压波信号以及管道漏磁图像;
4、基于漏磁缺陷检测网络对所述管道漏磁图像进行检测,判定所述管道是否存在泄漏;
5、若所述管道无泄漏,则基于双向长短期记忆神经网络对所述负压波信号去噪;
6、基于一维卷积神经网络串联循环神经网络对去噪后的负压波信号进行拐点特征识别,提取上下游负压波到达时间差;
7、采集清管器在运行过程中距离上游压力传感器的距离;
8、采集上下游压力传感器接收到负压波信号的时间和上下游压力传感器之间的距离;
9、根据清管器在运行过程中距离上游压力传感器不同的距离、上下游压力传感器接收到负压波信号的时间和上下游压力传感器之间的距离,计算出多个负压波波速;
10、对多个负压波波速进行平均值计算得到修正负压波波速;
11、将所述修正负压波波速和上下游负压波到达时间差代入负压波定位公式得到清管器位置。
12、在一个具体的可实施方案中,将所述管道漏磁图像输入至所述漏磁缺陷检测网络,经过卷积运算之后,获取管道漏磁缺陷图像;
13、根据管道漏磁缺陷图像判定所述管道是否存在泄漏。
14、在一个具体的可实施方案中,将所述负压波信号输入至所述双向长短期记忆神经网络得到噪声轮廓信号;
15、将所述负压波信号减去噪声轮廓信号得到去噪后的负压波信号。
16、在一个具体的可实施方案中,将所述去噪后的负压波信号输入至一维卷积神经网络串联循环神经网络;
17、所述一维卷积神经网络学习所述去噪后的负压波信号的拐点特征;
18、所述循环神经网络提取所述去噪后的负压波信号的拐点信息以及上下文关联信息;
19、所述循环神经网络根据所述拐点信息以及上下文关联信息对去噪后的负压波信号进行分类;
20、提取上下游负压波到达的时间差。
21、在一个具体的可实施方案中,在所述清管器运行过程中,当所述清管器在运行过程中,记录5组不同的位置为、、、、;分别记录所述清管器运行至、、、、各点时所述上下游压力传感器接收到所述负压波信号的时间为、、、、与、、、、,所述上下游压力传感器之间的距离为l;当所述清管器运行到点时,所述上游压力传感器接收到所述负压波信号的时间为,所述下游压力传感器接收到所述负压波信号的时间为,则负压波波速为,将、、、l代入波速修正公式中,所述波速修正公式为:;其中 为清管器运行至 计算得出的负压波波速,其中 为清管器运行至 计算得出的负压波波速,其中 为清管器运行至 计算得出的负压波波速,其中 为清管器运行至 计算得出的负压波波速,其中 为清管器运行至 计算得出的负压波波速
22、所述修正负压波波速为。
23、在一个具体的可实施方案中,所述修正负压波波速为、所述上下游负压波信号到达时间差为,所述清管器位置为,所述负压波定位公式为。
24、第二方面,本申请还提供了一种多参数相互融合的清管器实时定位装置,包括:
25、基础信息采集模块,用于采集管道首、末段的负压波信号以及管道漏磁图像;
26、管道漏磁判断模块,用于基于漏磁缺陷检测网络对所述管道漏磁图像进行检测,判定所述管道是否存在泄漏;
27、负压波信号去噪模块,用于若所述管道无泄漏,则基于双向长短期记忆神经网络对所述负压波信号去噪;
28、负压波时间差计算模块,用于基于一维卷积神经网络串联循环神经网络对去噪后的负压波信号进行拐点特征识别,提取上下游负压波到达时间差;
29、上游距离采集模块,用于采集清管器在运行过程中距离上游压力传感器的距离;
30、时间距离采集模块,用于采集上下游压力传感器接收到负压波信号的时间和上下游压力传感器之间的距离;
31、负压波波速计算模块,用于根据清管器在运行过程中距离上游压力传感器不同的距离、上下游压力传感器接收到负压波信号的时间和上下游压力传感器之间的距离,计算出多个负压波波速;
32、修正负压波计算模块,用于对多个负压波波速进行平均值计算得到修正负压波波速;
33、清管器位置计算模块,用于将所述修正负压波波速和上下游负压波到达时间差代入负压波定位公式得到清管器位置。
34、第三方面,本申请还提供了一种计算机设备,包括:存储器和处理器,所述存储器上存储有能够被处理器加载并执行如上述一种多参数相互融合的清管器实时定位方法的计算机程序。
35、第四方面,本申请还提供了一种计算机可读存储介质,采用如下技术方案:储存有能够被处理器加载并执行上述任一种多参数相互融合的清管器实时定位方法的计算机程序。
36、本申请实施例提供的方法、装置、设备及存储介质,通过漏磁缺陷检测网络,使得系统可以快速、精准的对管道完整性进行检测,保证了管道的完整;所述双向长短期记忆神经网络通过构造负压波含躁信号训练模型,能够精准预测噪声轮廓信号,达到消除噪声的目的;所述一维卷积神经网络串联循环神经网络的模型对比传统负压波时间差提取方法具有拐点分类准确的特点,保障时间差提取精确。
技术特征:
1.一种多参数相互融合的清管器实时定位方法,其特征在于,所述一种多参数相互融合的清管器实时定位方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于漏磁缺陷检测网络对所述管道漏磁图像进行检测,判定所述管道是否存在泄漏包括:
3.根据权利要求1所述的方法,其特征在于,所述基于双向长短期记忆神经网络对所述负压波信号去噪包括:
4.根据权利要求3所述的方法,其特征在于,所述基于一维卷积神经网络串联循环神经网络对去噪后的负压波信号进行拐点特征识别,提取上下游负压波到达时间差包括:
5.根据权利要求1所述的方法,其特征在于,所述对多个负压波波速进行平均值计算得到修正负压波波速包括:
6.根据权利要求5所述的方法,其特征在于,所述将所述修正负压波波速和上下游负压波道道时间差代入负压波定位公式得到清管器位置包括:
7.一种多参数相互融合的清管器实时定位装置,其特征在于,所述装置包括:
8.一种计算机设备,其特征在于,包括存储器和处理器,所述存储器上存储有能够被处理器加载并执行如权利要求1至6中任一种方法的计算机程序。
9.一种计算机可读存储介质,其特征在于,存储有能够被处理器加载并执行如权利要求1至6中任一种方法的计算机程序。
技术总结
本申请公开一种多参数相互融合的清管器实时定位方法及装置,所述方法包括:采集管道首、末段的负压波信号以及管道漏磁图像;对管道漏磁图像进行检测,判定管道是否存在泄漏;若所述管道无泄漏,则对负压波信号去噪;对去噪后的负压波信号进行拐点特征识别,提取上下游负压波到达时间差;采集清管器在运行过程中距离上游压力传感器的距离;采集上下游压力传感器接收到负压波信号的时间和上下游压力传感器之间的距离;根据采集信息,计算出多个负压波波速;对多个负压波波速进行修正得到修正负压波波速;根据修正负压波波速和负压波到达时间差计算得清管器位置。采用前述方法,可对清管器的位置进行实时定位,从而提升了清管器运行的安全程度。
技术研发人员:郭晓婷,宋华东,曾艳丽,陈洪鹤,张弘弦,刘冠林,王晴雅
受保护的技术使用者:国机传感科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!